
Background
Designers and engineers create solutions that solve problems every day. In this Helping Hand Unit, students will explore how tools and mechanisms are used to solve authentic problems in order to make tasks easier in everyday life. They will build, test, and modify the gripper of the Adaptation Claw.
What is a Mechanism?
A mechanism is a device for doing something, and can be used to help a person complete a task. This can be as simple as a pulley, lever, or pencil sharpener. Mechanisms can also be as complex as a fully automated assembly line.

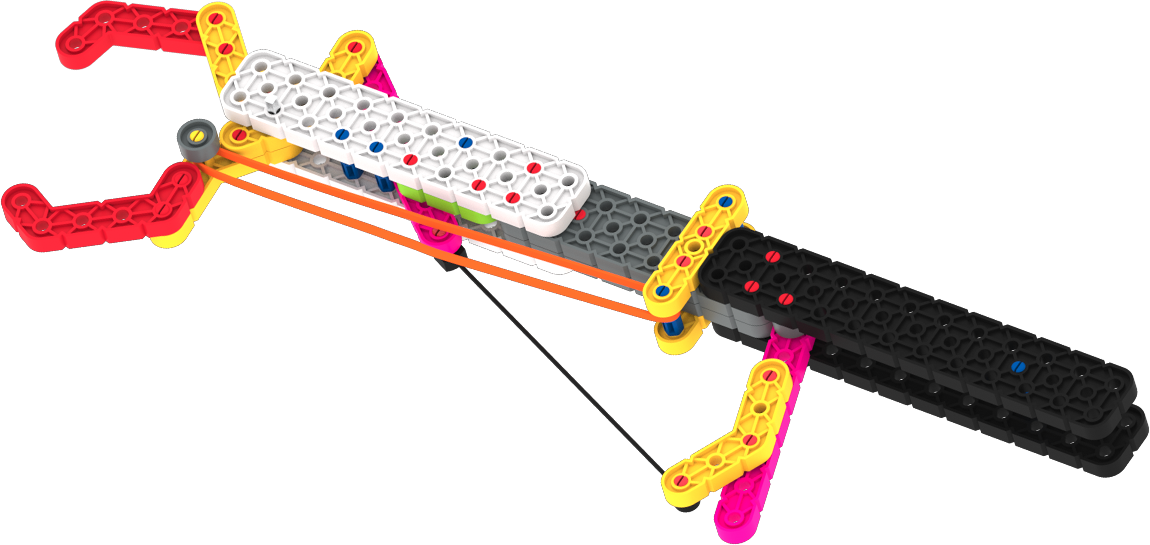
The Adaptation Claw is a mechanism. It is a handheld mechanical tool used to increase the range of a person's reach when grabbing objects. It works like an extension of your arm allowing you to reach down and pick things up off the ground without bending or stooping over. It can also help with reaching and grabbing things in high overhead places, as well as areas that are difficult to get to.

How Can Mechanisms Help Solve Real World Problems?
An adaptation is something that makes an object or a species better suited to its environment. People can use mechanical adaptations to help solve real-world problems such as limited mobility, or to prevent injury.
Reach extenders are an example of a widely used mechanism that solve a real world problem. Reach extenders are used by litter collection services to aid in picking up litter off the ground without having to bend over. They are also used to provide accessibility to the disabled and elderly, or to prevent injury. People may construct specially adapted forms for special purposes.
Students will discuss mechanisms that they have seen or experienced in the real world, such as pencil sharpeners, car washes, hand tools, and reach extenders. They will be introduced to how these mechanisms are used in assisted living facilities to help people, and in manufacturing to complete tasks.
Students will build and test an Adaptation Claw to solve the authentic problem of picking up objects with limited mobility. They will also design a gripper to “adapt” or modify its usability.
What is a Gripper?
A gripper is something that grips things or makes it easier to grab and hold things. The gripper on the end of the Adaptation Claw can be thought of as the “hand” of the mechanism. It’s function is to grab and hold an object, so the user does not need to maintain a tight grip on the handle.
Some grippers are equipped with suction cups for holding round objects more easily, and still others have small magnets for collecting lightweight metallic items. In Lab 2, students will design and test modifications to the Adaptation Claw’s gripper in order to capture and hold specific objects. They will modify their Adaptive Claw so that it is better suited to pick up certain objects.


VEX GO Pieces
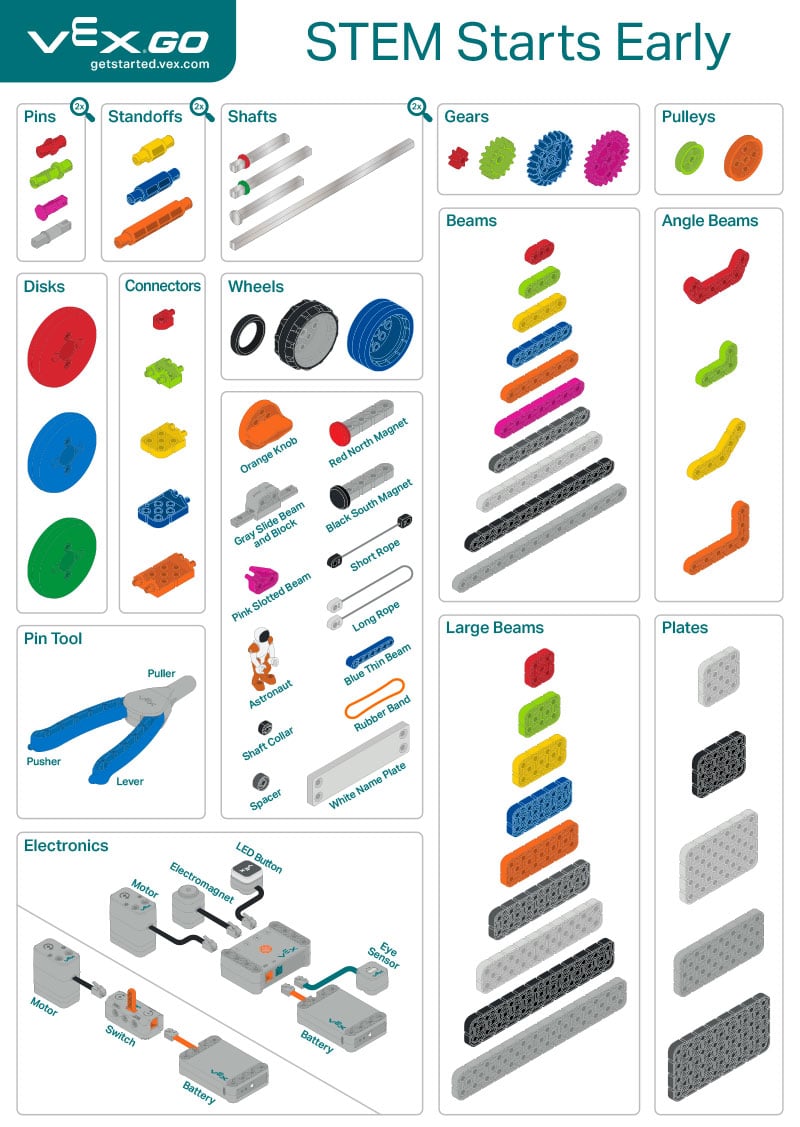
The following VEX GO pieces are essential parts of the Adaptation Claw build. The VEX GO Poster illustrates all VEX GO pieces and organizes them according to their function in a build.
Beams and Plates
Beams and plates are used to create the structural base of most builds. These are flat pieces with varying widths and lengths. The width and length of a beam or plate can be measured by the number of holes on the piece. Students will learn as they begin to build that beams (1 hole in width) are not as stable as large beams (2 hole width) or plates (3 or more hole widths).

There are several unique beams including four Angle Beams. These beams create angles at 45 or 90 degrees. Other unique beams include the Blue Thin Beam which has one hole that will fit a shaft and allows the beam to rotate, and has additional holes for standard connections. The Pink Slotted Beam can be used to secure the Rubber Band or ropes in a build.
Shafts and Shaft Collars
VEX GO shafts are square rods that are primarily used as axles to allow assemblies to spin or rotate. This square shape allows the shafts to fit into a square socket in the motor or in the center of gears, wheels, and pulleys. Shafts need to be held in place in order to enable the shaft to spin freely and not slide out of the assembly. The top of the Capped Shaft will keep the shaft in place. A Shaft Collar will need to be used with the following shafts: Red Shaft, Green Shaft, and the Plain Shaft.
Unique Pieces
Spacers can be used to add space between parts or as a collar for a shaft. Spacers are especially useful when making room for a part to move freely in a build.
The Rubber Band is used in a variety of ways in VEX GO builds, such as creating power or to link pulleys together. Stretching the Rubber Band to different lengths will give the build different amounts of potential energy that can be transformed into kinetic energy to power a part of a build.
The Short Rope and the Long Rope are multipurpose pieces that have many applications in VEX GO builds. In particular, they can be used to attach parts or facilitate a transfer of energy within a build.