
練習する
前のセクションでは、ロボットに作用する力と、不均衡な力がどのようにロボットを動かすかについて学びました。 次に、ロープ取り付けアクティビティで学んだことを応用します。
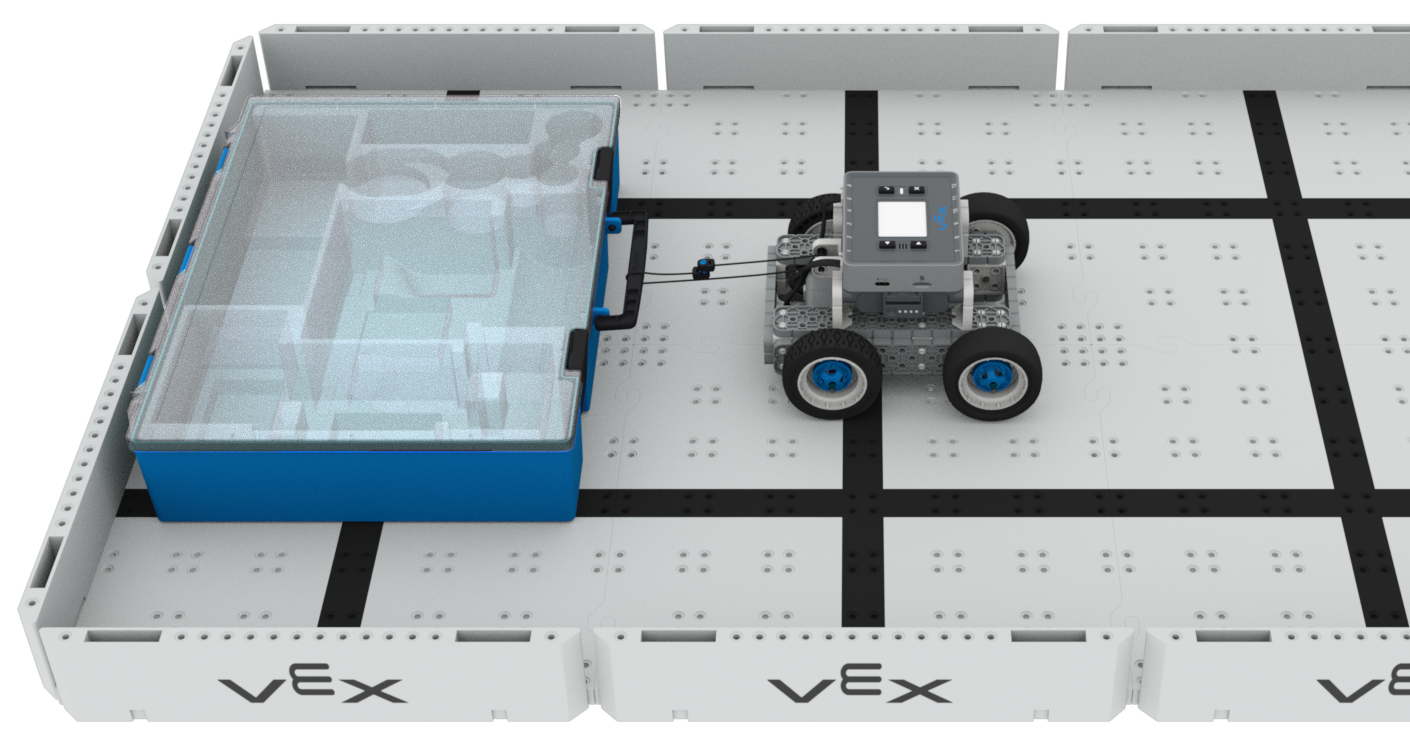
このアクティビティでは、IQ キットのロープがロボットにどのように、どこに取り付けられて不均衡な力が生じたかに基づいて、IQ モーション ビンを 5 秒以内にどこまで引っ張ることができるかを確認します。
以下のビデオを見て、ロープ アタッチメントの練習アクティビティを完了するために学んだ内容をどのように適用できるかを確認してください。
次は、ロープの取り付けの練習アクティビティを完了する番です。
この文書の手順に従って、この練習アクティビティを完了して 。 Google ドキュメント / .docx / .pdf
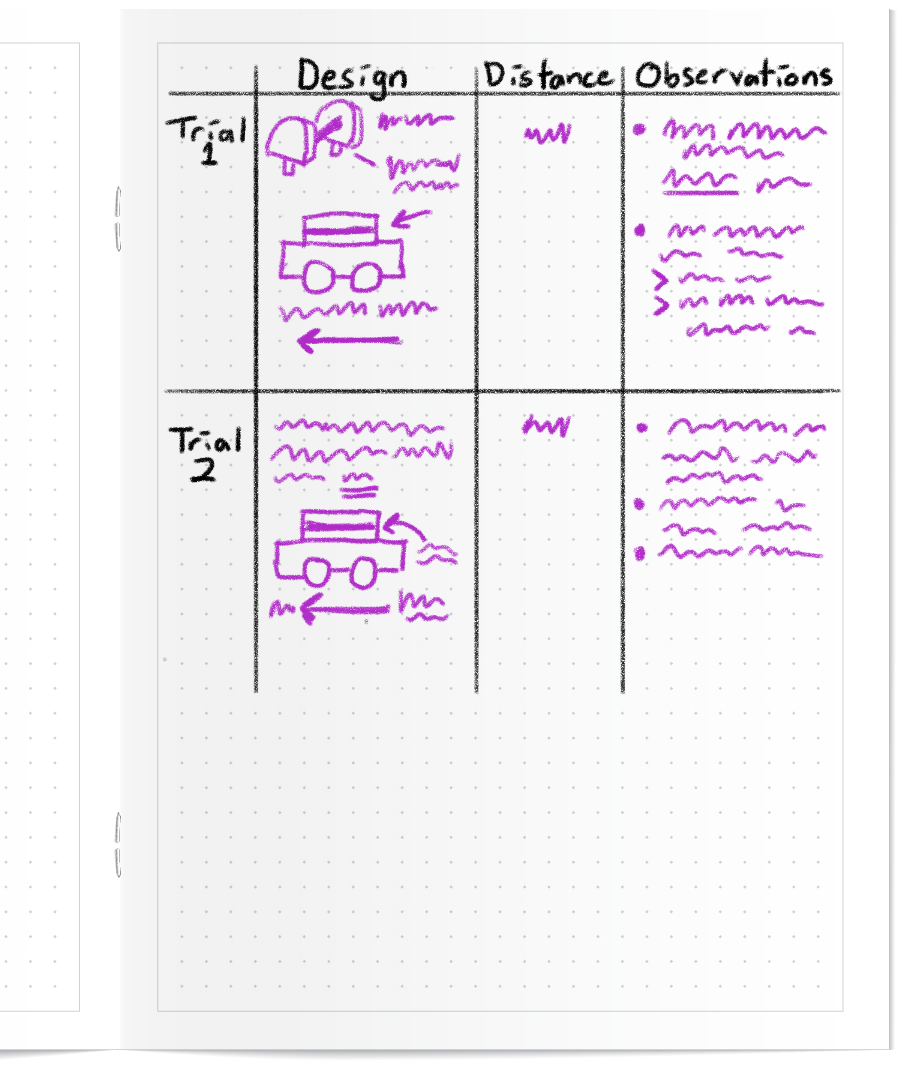
演習アクティビティを完了したら、エンジニアリング ノートに次の内容を文書化します。
- アタッチメントのデザイン
- ゴミ箱はどのくらいの距離まで移動しましたか
- テスト実行中の観察
結果を記録する方法の例については、この画像を参照してください。
チャレンジの準備をする
競争 (次のページ) では、ロープの取り付けデザインと配置を選択し、BaseBot で IQ モーション ビンを最も遠くまで引くことを競います。 ロボット トラクター プル チャレンジに参加する方法を学び、理解度を確認してから、チャレンジに向けて練習します。
このアニメーションを見て、ロボット トラクター プル チャレンジでロボットが ように動くかを確認してください。
このチャレンジを完了する方法の詳細については、このドキュメントの手順に従ってください。 Google ドキュメント / .docx / .pdf
理解を確認してください
チャレンジを開始する前に、エンジニアリング ノートブックにある以下の文書の質問に答えて、ルールを理解し、設定していることを確認してください。
理解度をチェックする質問 Google ドキュメント / .docx / .pdf
問題を完了したら、 チャレンジの練習をしてください。
次へ > を選択して、ロボット トラクター プル チャレンジに参加します。