
Практика
У минулому розділі ви дізналися про сили, які діють на вашого робота, і про те, як незбалансовані сили можуть змусити робота рухатися. Тепер ви збираєтеся застосувати те, чого навчилися під час вправи «Прикріплення мотузки».
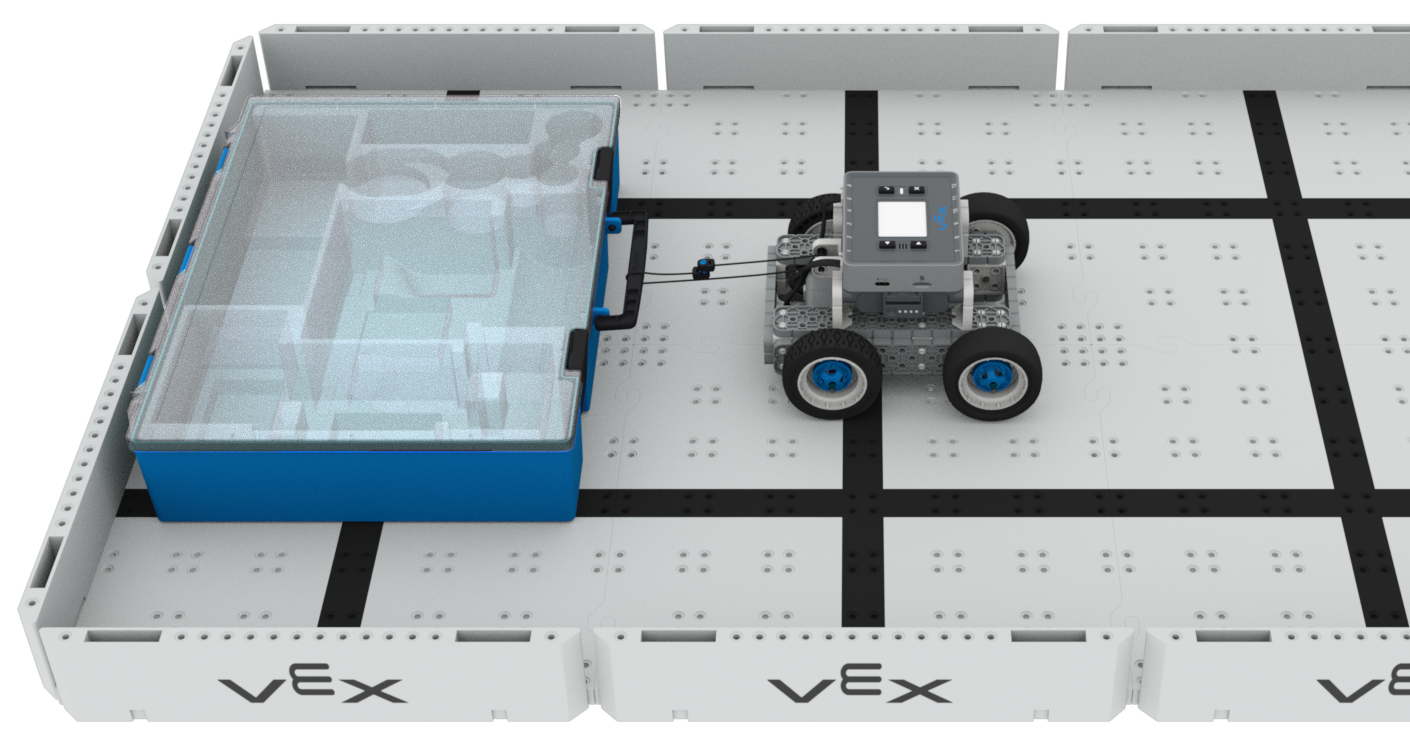
У цій вправі ви побачите, на яку відстань можна витягнути контейнер IQ Motion Bin за п’ять секунд залежно від того, як і де мотузка з набору IQ була прикріплена до вашого робота, щоб створити незбалансовану силу.
Перегляньте відео нижче, щоб побачити, як ви можете застосувати те, що ви навчилися, щоб виконати практичну вправу «Прикріплення мотузки».
Тепер ваша черга виконати вправу «Кріплення мотузки»!
Виконайте кроки в цьому документі, щоб цю практичну вправу. Google Doc / .docx / .pdf
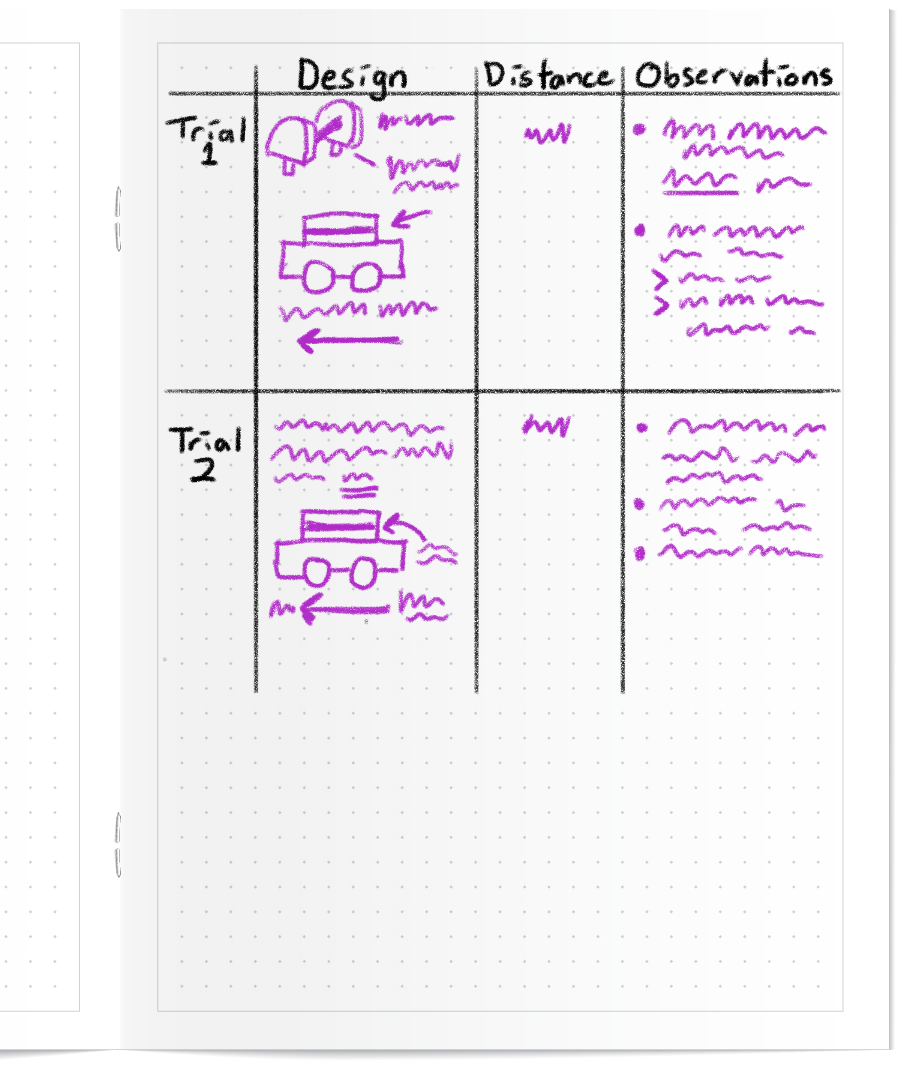
Виконуючи практичну роботу, задокументуйте наступне у своєму інженерному блокноті:
- дизайн вашого вкладення
- наскільки далеко було переміщено кошик
- спостереження під час тестових прогонів
Перегляньте це зображення для прикладу того, як ви можете записати свої результати.
Підготуйтеся до виклику
У Compete (на наступній сторінці) ви виберете конструкцію та місце кріплення для мотузки, а потім змагатиметеся, щоб найдалі витягнути кошик IQ Motion за допомогою свого BaseBot. Дізнайтеся, як брати участь у змаганні Robot Tractor Pull, перевірте своє розуміння, а потім потренуйтеся до завдання.
Подивіться цей анімаційний ролик, щоб побачити, як повинен рухатися ваш робот у Robot Tractor Pull Challenge.
Виконайте кроки в цьому документі, щоб дізнатися більше про те, як виконати це завдання. Google Doc / .docx / .pdf
Перевірте ваше розуміння
Перш ніж почати завдання, переконайтеся, що ви розумієте правила та налаштування, відповівши на запитання в документі нижче у вашому інженерному блокноті.
Запитання для перевірки розуміння Google Doc / .docx / .pdf
Відповівши на запитання, потренуйтеся на завдання .
Виберіть «Далі > , щоб взяти участь у змаганні «Робот-трактор».