
연습
마지막 섹션에서는 로봇에서 작용하는 힘과 불균형한 힘이 로봇을 움직이게 하는 방법에 대해 배웠습니다. 이제 로프 부착 활동에서 배운 내용을 적용해 보겠습니다. 이
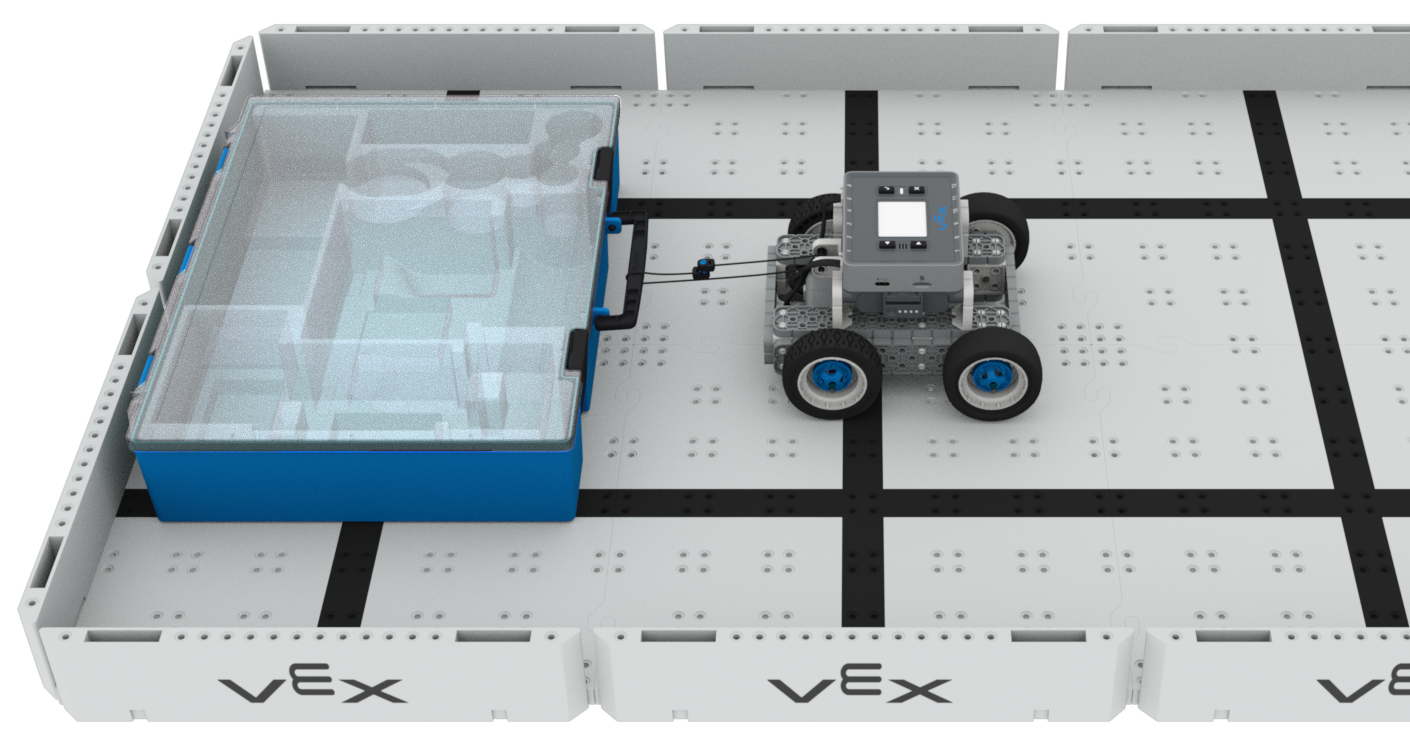
활동에서는 IQ 키트의 로프를 로봇에 부착하여 불균형한 힘을 생성하는 방법과 위치에 따라 IQ 모션 빈을 5초 만에 당길 수 있는 거리를 확인할 수 있습니다. 아래 동영상을
시청하여 학습한 내용을 적용하여 로프 부착 연습 활동을 완료하는 방법을 확인하세요.
아래 영상을 시청하여 로프 부착 연습 활동을 완료하기 위해 배운 내용을 어떻게 적용할 수 있는지 확인하세요.
이제 로프 부착 연습 활동을 완료할 차례입니다!
이 연습 활동을 완료하려면 이 문서의 단계를 따르세요. Google Doc / .docx / .pdf
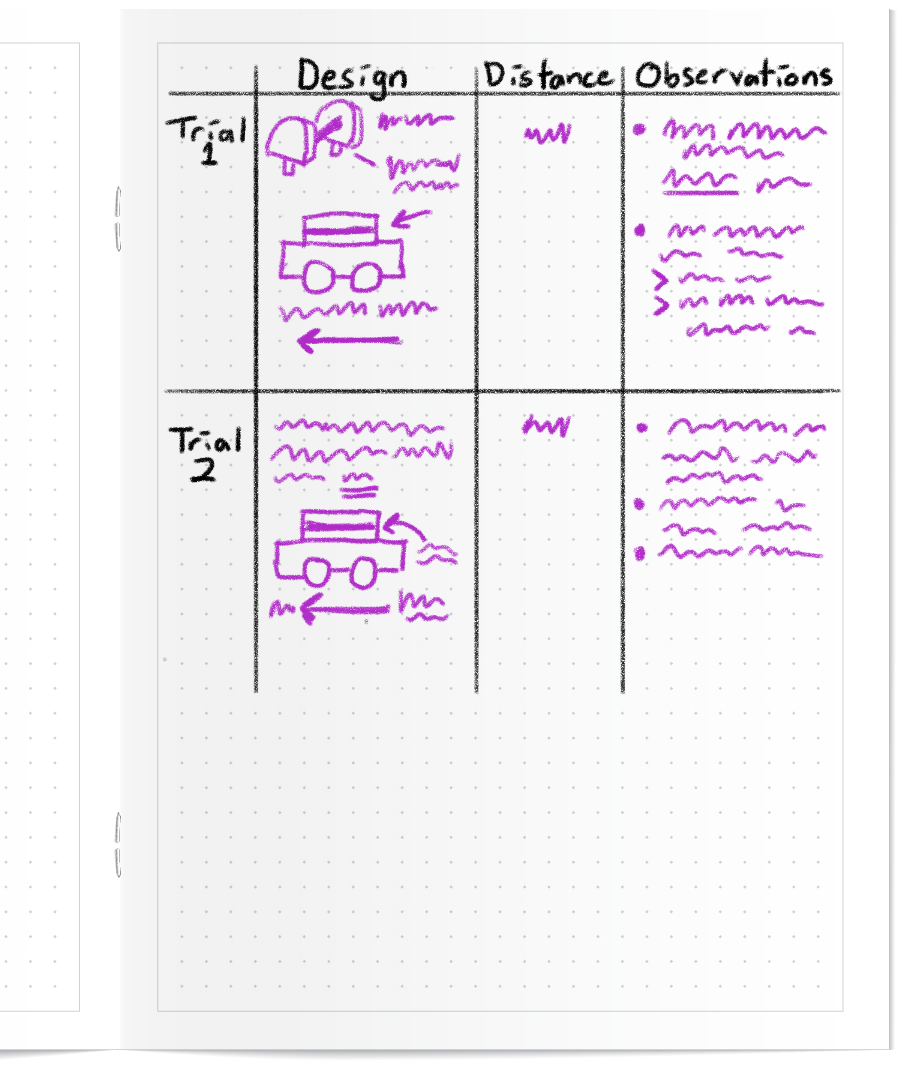
실습 활동을 완료할 때 엔지니어링 노트에 다음 사항을 기록합니다.
- 첨부 파일 디자인
- 휴지통이 얼마나 멀리 이동했는지
- 테스트 실행 중 관찰
결과를 기록하는 방법의 예는 이 이미지를 참조하세요.
챌린지에 대비하세요
경쟁(다음 페이지)에서는 로프 부착 디자인과 위치를 선택한 다음, BaseBot으로 IQ Motion Bin을 가장 멀리 끌어당기는 경쟁을 벌입니다. 로봇 트랙터 풀 챌린지에 참가하는 방법을 알아보고, 이해도를 확인한 다음, 챌린지에 대비해 연습해 보세요.
이해도 확인하기
챌린지를 시작하기 전에 엔지니어링 노트의 아래 문서에 있는 질문에 답하여 규칙을 이해하고 설정했는지 확인하십시오.
이해하기 질문 확인 Google Doc / .docx / .pdf
질문을 완료한 후, 챌린지를 위해 연습하십시오.
로봇 트랙터 풀 챌린지에 > 참가하려면 '다음' 을 선택하세요.