
CS 레벨 1 - VEX코드 VR 블록
9 단위
VEXcode VR 컴퓨터 과학 레벨 1 - 블록 과정으로 컴퓨터 과학을 배우는 여정을 시작하세요! VEXcode VR과 흥미로운 로봇 기반 활동을 통해 학생들은 프로젝트 흐름, 루프, 조건문, 알고리즘에 대해 배웁니다.
VEXcode VR로 가르칠 때 도움이 되는 지속적인 전문 개발에 액세스하세요. 동영상, 강의, 커뮤니티 대화 등을 통해 시기적절하고 타겟이 분명한 PD를 만나보세요!
단위 1
소개 및 기본 사항
이 단원에서는 VEXcode VR의 가치와 사용 편의성을 보여드립니다. 이 단원에서는 또한 과정의 구조를 개략적으로 설명하고, 무엇을 기대해야 할지 미리 보여주고, 성공하는 데 필요한 도구를 제공합니다.

단위 2
로봇 이동
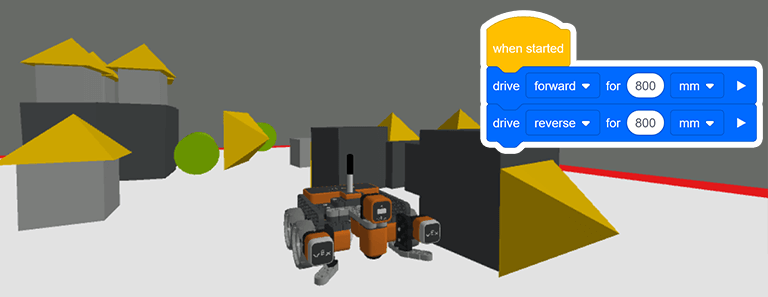
이 단원에서는 캐슬 크래셔 과제를 해결하게 됩니다. VEXcode VR을 사용하여 VR 로봇이 Drivetrain 명령을 사용하여 Castle Crasher 놀이터를 돌아다니는 방법을 배우게 됩니다. 또한 놀이터에 있는 모든 성을 무너뜨리기 위해 명령을 올바르게 순서대로 내리는 방법도 배우게 됩니다.

단위 3
반복되는 행동
이 단원에서는 집 그리기 챌린지를 풀어보겠습니다. VR 로봇에서 펜 도구를 사용하여 아트 캔버스 플레이그라운드에 다양한 모양을 그리는 방법을 배웁니다. 또한 VEXcode VR에서 루프를 사용하여 정사각형의 변을 그리는 것과 같은 일련의 동작을 여러 번 반복하는 방법도 배웁니다.
단위 4
미로 탐색
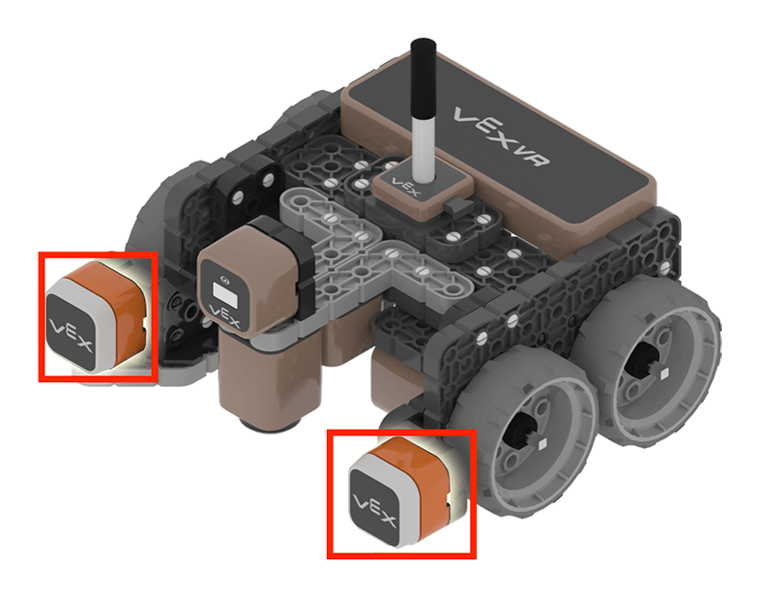
이 단원에서는 드라이브트레인 명령만으로 움직임을 "하드 코딩"하는 대신, 주변 환경에 관계없이 센서 입력을 사용하여 VR 로봇을 탐색하는 방법을 보여줍니다. 이는 효과적인 알고리즘을 구축하는 데 있어 중요한 첫 단계입니다. VEXcode VR을 사용하여 벽 미로 챌린지에 참여하여 VR 로봇을 벽 미로 놀이터에서 처음부터 끝까지 조종합니다. 범퍼 센서와 [대기] 블록을 사용하여 벽 미로 챌린지를 푸는 방법을 배우게 됩니다.
단위 5
멀리서 벽 감지
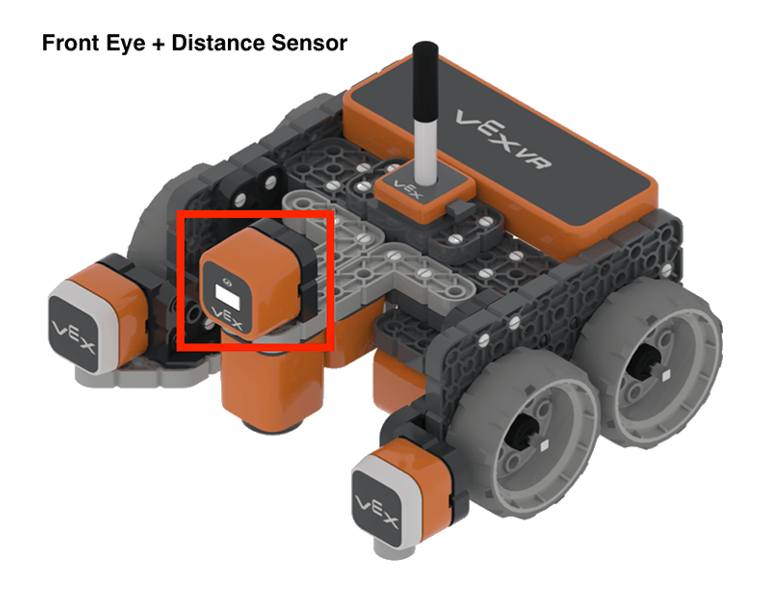
이 단원에서는 벽에 부딪히지 않고 벽 미로 챌린지를 통해 VR 로봇을 처음부터 끝까지 조종하게 됩니다! VR 로봇의 거리 센서와 비교 블록을 사용하여 벽 미로 과제를 해결하는 방법을 배우게 됩니다.
단위 6
당신의 위치를 아는 것
이 단원에서는 세 개의 숫자로 운전하기 챌린지를 완료하고 위치 센서를 사용하여 VR 로봇을 숫자 그리드 맵 놀이터의 세 개의 다른 번호가 매겨진 위치로 이동시킵니다! Drive to Three Numbers 챌린지를 풀기 위해 Drivetrain, Sensing, Control 카테고리의 블록을 올바른 순서대로 적용해야 합니다.
단위 7
색상에 따른 결정
이 단원에서는 조건문의 중요성에 대해 알아봅니다. VR 로봇이 의도한 대로 동작하려면 [If then] 블록과 같은 조건문이 [Forever] 블록과 같은 루프와 함께 사용되어야 하는 이유를 살펴보겠습니다. 디스크 미로 챌린지를 풀기 위해 눈 센서와 조건문을 사용하는 방법을 배우게 됩니다. 디스크 메이즈 챌린지에서 VR 로봇은 눈 센서를 사용하여 색상을 감지하고 디스크 메이즈 놀이터를 처음부터 끝까지 탐색합니다.

단위 8
루프를 사용하여 디스크 이동
이 단원에서는 센서 피드백과 중첩 루프의 중요성에 대해 알아봅니다. VR 로봇의 전자석을 사용하여 디스크를 집어 올리고 떨어뜨리는 방법을 배우고 디스크 이동 챌린지를 해결합니다. 이전 단원에서 배운 기술을 적용하여 VR 로봇 센서와 루프를 사용하여 디스크 무버 챌린지를 해결하는 VEXcode VR 프로젝트를 만듭니다.
단위 9
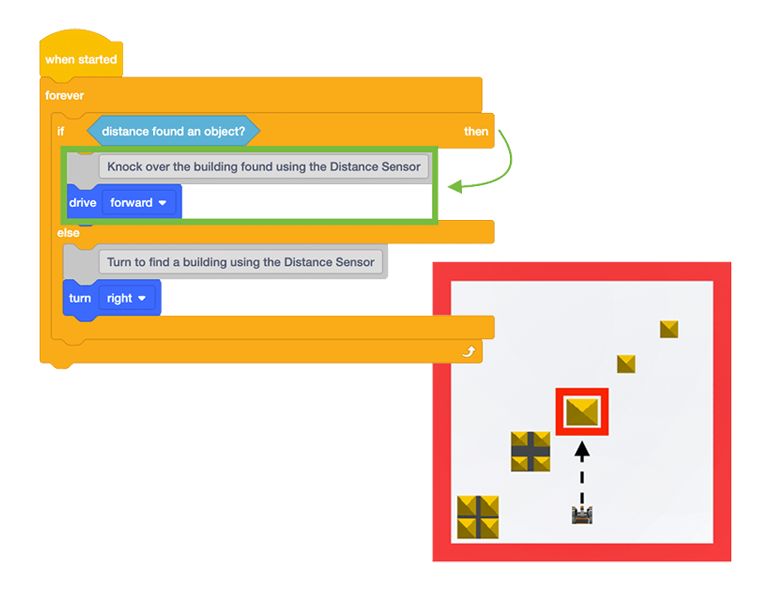
알고리즘 개발
이 단원에서는 알고리즘을 소개합니다. 2단원에서는 레이아웃이 바뀌지 않은 놀이터에서 Castle Crasher 챌린지를 풀었습니다. 이 단원에서는 동일한 과제를 해결해야 하지만, 매번 재설정할 때마다 레이아웃이 바뀌는 놀이터에서 해결해야 합니다. 이는 일련의 간단한 명령 대신 센서 피드백을 사용하는 알고리즘의 필요성을 제시합니다.

관석
산호초 청소
배운 모든 것을 현실 세계의 개방형 과제에 적용해 보세요! 바다 청소 로봇의 배터리가 소진되기 전에 산호초에서 가능한 한 많은 쓰레기를 수거하도록 VR 로봇을 코딩하세요.