
CS ലെവൽ 1 - VEXcode VR ബ്ലോക്കുകൾ
9 യൂണിറ്റുകൾ
VEXcode VR കമ്പ്യൂട്ടർ സയൻസ് ലെവൽ 1 - ബ്ലോക്ക്സ് കോഴ്സ് ഉപയോഗിച്ച് കമ്പ്യൂട്ടർ സയൻസ് പഠിക്കാനുള്ള യാത്ര ആരംഭിക്കൂ! VEXcode VR ഉം ആകർഷകമായ റോബോട്ടിക്സ് അധിഷ്ഠിത പ്രവർത്തനങ്ങളും ഉപയോഗിച്ച്, വിദ്യാർത്ഥികൾ പ്രോജക്റ്റ് ഫ്ലോ, ലൂപ്പുകൾ, കണ്ടീഷനലുകൾ, അൽഗോരിതങ്ങൾ എന്നിവയെക്കുറിച്ച് പഠിക്കും.
നിങ്ങൾ VEXcode VR ഉപയോഗിച്ച് പഠിപ്പിക്കുമ്പോൾ നിങ്ങളെ പിന്തുണയ്ക്കാൻ നിലവിലുള്ള പ്രൊഫഷണൽ വികസനം ആക്സസ് ചെയ്യുക. വീഡിയോകൾ, പാഠങ്ങൾ, കമ്മ്യൂണിറ്റി സംഭാഷണങ്ങൾ എന്നിവയിലൂടെയും മറ്റും സമയബന്ധിതവും ടാർഗെറ്റുചെയ്തതുമായ പിഡി!
പ്രൊഫഷണൽ ഡെവലപ്മെൻ്റ് പ്ലസ് എന്നതിനെക്കുറിച്ച് കൂടുതലറിയുക >
യൂണിറ്റ് 1
ആമുഖവും അടിസ്ഥാനകാര്യങ്ങളും
ഈ യൂണിറ്റ് VEXcode VR ന്റെ മൂല്യവും അത് ഉപയോഗിക്കാൻ എത്ര എളുപ്പവുമാണെന്ന് നിങ്ങൾക്ക് കാണിച്ചുതരുന്നു. ഈ യൂണിറ്റ് കോഴ്സിന്റെ ഘടനയും രൂപരേഖ നൽകുന്നു, എന്താണ് പ്രതീക്ഷിക്കേണ്ടതെന്ന് നിങ്ങൾക്ക് ഒരു ദർശനം നൽകുകയും വിജയിക്കുന്നതിനുള്ള ഉപകരണങ്ങൾ നൽകുകയും ചെയ്യുന്നു.

യൂണിറ്റ് 2
നിങ്ങളുടെ റോബോട്ട് നീക്കുന്നു
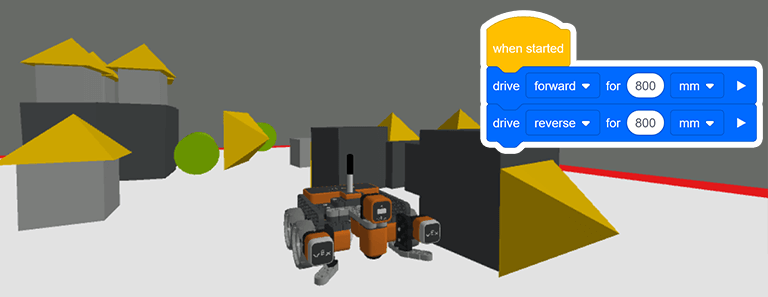
ഈ യൂണിറ്റിൽ, നിങ്ങൾ കാസിൽ ക്രാഷർ വെല്ലുവിളി പരിഹരിക്കും. കാസിൽ ക്രാഷർ പ്ലേഗ്രൗണ്ടിൽ ചുറ്റി സഞ്ചരിക്കുന്നതിന് VR റോബോട്ടിനെ ഡ്രൈവ്ട്രെയിൻ കമാൻഡുകൾ ഉപയോഗിക്കാൻ പ്രേരിപ്പിക്കുന്നതിന് VEXcode VR എങ്ങനെ ഉപയോഗിക്കാമെന്ന് നിങ്ങൾ പഠിക്കും. കളിസ്ഥലത്തെ എല്ലാ കോട്ടകളെയും തകർക്കുന്നതിനായി കമാൻഡുകൾ എങ്ങനെ ശരിയായി ക്രമീകരിക്കാമെന്നും നിങ്ങൾ പഠിക്കും.

യൂണിറ്റ് 3
ആവർത്തിച്ചുള്ള പെരുമാറ്റങ്ങൾ
ഈ യൂണിറ്റിൽ, നിങ്ങൾ ഒരു വീട് വരയ്ക്കുക എന്ന വെല്ലുവിളി പരിഹരിക്കും. ആർട്ട് കാൻവാസ് പ്ലേഗ്രൗണ്ടിൽ വ്യത്യസ്ത ആകൃതികൾ വരയ്ക്കാൻ ഒരു VR റോബോട്ടിൽ പെൻ ടൂൾ എങ്ങനെ ഉപയോഗിക്കാമെന്ന് നിങ്ങൾ പഠിക്കും. ഒരു ചതുരത്തിന്റെ വശങ്ങൾ വരയ്ക്കുന്നത് പോലുള്ള പെരുമാറ്റങ്ങളുടെ ഒരു കൂട്ടം ഒന്നിലധികം തവണ ആവർത്തിക്കുന്നതിന് VEXcode VR-ൽ ലൂപ്പുകൾ എങ്ങനെ ഉപയോഗിക്കാമെന്നും നിങ്ങൾ പഠിക്കും.
യൂണിറ്റ് 4
ഒരു മേസിൽ സഞ്ചരിക്കുന്നു
ഡ്രൈവ്ട്രെയിൻ കമാൻഡുകൾ മാത്രം ഉപയോഗിച്ച് "ഹാർഡ്-കോഡിംഗ്" ചലനത്തിന് പകരം, ചുറ്റുപാടുകൾ പരിഗണിക്കാതെ VR റോബോട്ടിനെ എങ്ങനെ സെൻസർ ഇൻപുട്ട് ഉപയോഗിച്ച് നാവിഗേറ്റ് ചെയ്യാമെന്ന് ഈ യൂണിറ്റ് നിങ്ങളെ കാണിക്കും. ഫലപ്രദമായ ഒരു അൽഗോരിതം നിർമ്മിക്കുന്നതിനുള്ള ഒരു പ്രധാന ആദ്യപടിയാണിത്. തുടക്കം മുതൽ അവസാനം വരെ വാൾ മേസ് പ്ലേഗ്രൗണ്ടിലൂടെ VR റോബോട്ടിനെ നാവിഗേറ്റ് ചെയ്യുന്നതിന് VEXcode VR ഉപയോഗിച്ച് നിങ്ങൾ വാൾ മേസ് ചലഞ്ചിൽ പ്രവർത്തിക്കും. വാൾ മെയ്സ് ചലഞ്ച് പരിഹരിക്കാൻ ബമ്പർ സെൻസറും [വരെ കാത്തിരിക്കുക] ബ്ലോക്കും എങ്ങനെ ഉപയോഗിക്കാമെന്ന് നിങ്ങൾ പഠിക്കും.
യൂണിറ്റ് 5
ദൂരെ നിന്ന് മതിലുകൾ കണ്ടെത്തൽ
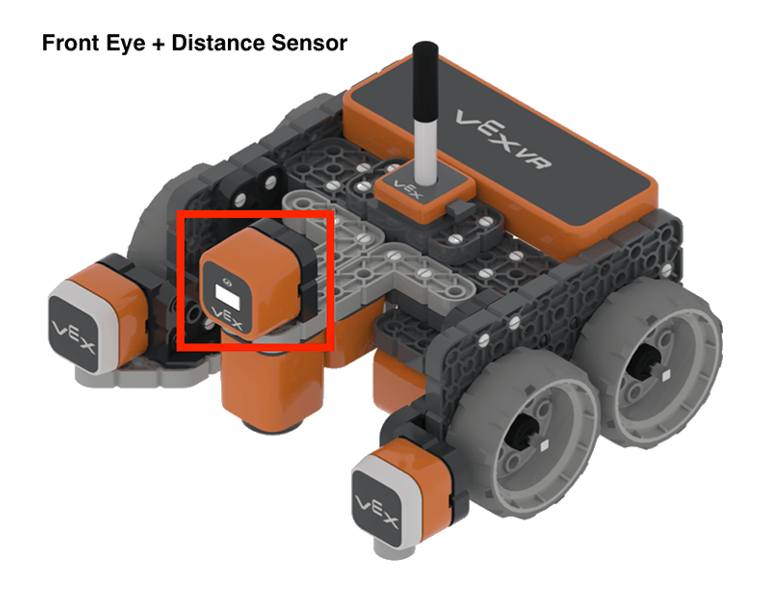
ഈ യൂണിറ്റിൽ, ചുവരുകളിൽ ഇടിക്കാതെ വാൾ മേസ് ചലഞ്ചിലൂടെ തുടക്കം മുതൽ അവസാനം വരെ നിങ്ങൾ VR റോബോട്ടിനെ മറികടക്കും! വാൾ മെയ്സ് വെല്ലുവിളി പരിഹരിക്കുന്നതിന് താരതമ്യ ബ്ലോക്കുകളുള്ള വിആർ റോബോട്ടിലെ ഡിസ്റ്റൻസ് സെൻസർ എങ്ങനെ ഉപയോഗിക്കാമെന്ന് നിങ്ങൾ പഠിക്കും.
യൂണിറ്റ് 6
നിങ്ങളുടെ സ്ഥാനം അറിയൽ
ഈ യൂണിറ്റിൽ, നിങ്ങൾ ഡ്രൈവ് ടു ത്രീ നമ്പേഴ്സ് ചലഞ്ച് പൂർത്തിയാക്കുകയും ലൊക്കേഷൻ സെൻസർ ഉപയോഗിച്ച് നമ്പർ ഗ്രിഡ് മാപ്പ് പ്ലേഗ്രൗണ്ടിലെ മൂന്ന് വ്യത്യസ്ത നമ്പറുകളുള്ള സ്ഥലങ്ങളിലേക്ക് VR റോബോട്ടിനെ നാവിഗേറ്റ് ചെയ്യുകയും ചെയ്യും! ഡ്രൈവ് ടു ത്രീ നമ്പറസ് വെല്ലുവിളി പരിഹരിക്കുന്നതിന്, ഡ്രൈവ്ട്രെയിൻ, സെൻസിംഗ്, കൺട്രോൾ വിഭാഗങ്ങളിൽ നിന്നുള്ള ബ്ലോക്കുകൾ ശരിയായ ക്രമത്തിൽ പ്രയോഗിക്കണം.
യൂണിറ്റ് 7
നിറങ്ങളുള്ള തീരുമാനങ്ങൾ
ഈ യൂണിറ്റിൽ, കണ്ടീഷണൽ പ്രസ്താവനകളുടെ പ്രാധാന്യത്തെക്കുറിച്ച് നിങ്ങളെ പരിചയപ്പെടുത്തും. VR റോബോട്ട് ഉദ്ദേശിച്ച രീതിയിൽ പ്രവർത്തിക്കുന്നതിന്, [If then] ബ്ലോക്ക് പോലുള്ള കണ്ടീഷണൽ സ്റ്റേറ്റ്മെന്റുകൾ ലൂപ്പുകളിൽ ഉപയോഗിക്കേണ്ടതിന്റെ ആവശ്യകത നിങ്ങൾ പര്യവേക്ഷണം ചെയ്യും, ഉദാഹരണത്തിന് [Forever] ബ്ലോക്കുകൾ. ഡിസ്ക് മേസ് ചലഞ്ച് പരിഹരിക്കാൻ ഐ സെൻസറും കണ്ടീഷണൽ സ്റ്റേറ്റ്മെന്റുകളും എങ്ങനെ ഉപയോഗിക്കാമെന്ന് നിങ്ങൾ പഠിക്കും. ഡിസ്ക് മേസ് ചലഞ്ചിൽ, നിറങ്ങൾ കണ്ടെത്തുന്നതിനായി ഐ സെൻസർ ഉപയോഗിച്ച് വിആർ റോബോട്ട് തുടക്കം മുതൽ അവസാനം വരെ ഡിസ്ക് മേസ് പ്ലേഗ്രൗണ്ടിലൂടെ സഞ്ചരിക്കും.

യൂണിറ്റ് 8
ലൂപ്പുകൾ ഉപയോഗിച്ച് ഡിസ്കുകൾ നീക്കുന്നു
ഈ യൂണിറ്റിൽ, സെൻസർ ഫീഡ്ബാക്കിന്റെയും നെസ്റ്റിംഗ് ലൂപ്പുകളുടെയും പ്രാധാന്യം നിങ്ങൾ പഠിക്കും. ഡിസ്ക് മൂവർ വെല്ലുവിളി പരിഹരിക്കുന്നതിന് ഡിസ്കുകൾ എടുക്കുന്നതിനും ഇടുന്നതിനും വിആർ റോബോട്ടിൽ ഇലക്ട്രോമാഗ്നറ്റ് എങ്ങനെ ഉപയോഗിക്കാമെന്ന് നിങ്ങൾ പഠിക്കും. ഡിസ്ക് മൂവർ ചലഞ്ച് പരിഹരിക്കുന്നതിന് VR റോബോട്ട് സെൻസറുകളും ലൂപ്പുകളും ഉപയോഗിക്കുന്ന ഒരു VEXcode VR പ്രോജക്റ്റ് സൃഷ്ടിക്കുന്നതിന് നിങ്ങൾ മുൻ യൂണിറ്റുകളിൽ പഠിച്ച കഴിവുകൾ പ്രയോഗിക്കും.
യൂണിറ്റ് 9
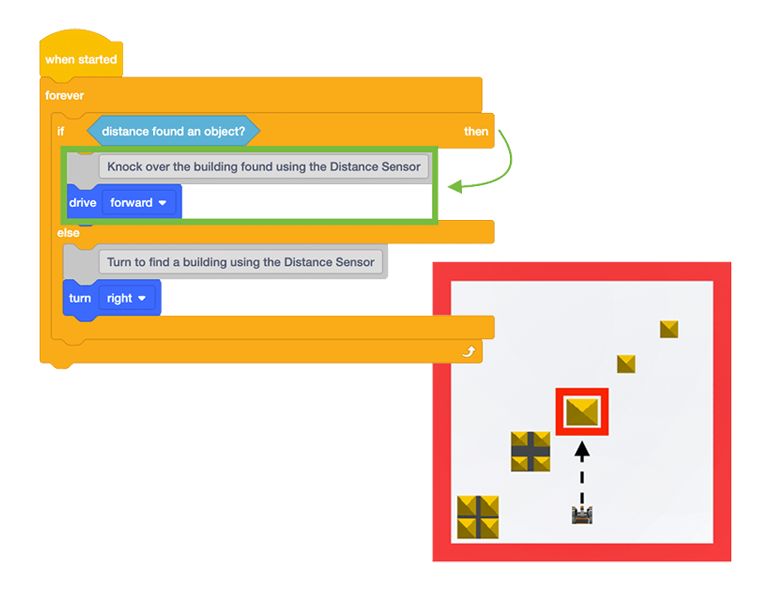
അൽഗോരിതങ്ങൾ വികസിപ്പിക്കൽ
ഈ യൂണിറ്റ് നിങ്ങളെ അൽഗോരിതങ്ങൾ പരിചയപ്പെടുത്തുന്നു. യൂണിറ്റ് 2-ൽ തിരിച്ചെത്തിയപ്പോൾ, ലേഔട്ട് മാറിയിട്ടില്ലാത്ത ഒരു കളിസ്ഥലത്ത് നിങ്ങൾ കാസിൽ ക്രാഷർ ചലഞ്ച് പരിഹരിച്ചു. ഈ യൂണിറ്റിൽ, നിങ്ങൾ അതേ വെല്ലുവിളി പരിഹരിക്കേണ്ടതുണ്ട്, എന്നാൽ ഓരോ റീസെറ്റിലും ലേഔട്ട് മാറ്റുന്ന ഒരു കളിസ്ഥലത്ത്. ലളിതമായ കമാൻഡുകളുടെ ഒരു ശ്രേണിക്ക് പകരം സെൻസർ ഫീഡ്ബാക്ക് ഉപയോഗിക്കുന്ന ഒരു അൽഗോരിതത്തിന്റെ ആവശ്യകത ഇത് അവതരിപ്പിക്കുന്നു.

ക്യാപ്സ്റ്റോൺ
പവിഴപ്പുറ്റ് വൃത്തിയാക്കൽ
നിങ്ങൾ പഠിച്ചതെല്ലാം ഒരു യഥാർത്ഥ ലോകത്തിലെ, തുറന്ന വെല്ലുവിളിയിൽ പ്രയോഗിക്കുക! സമുദ്ര ശുചീകരണ റോബോട്ടിലെ ബാറ്ററി തീരുന്നതിന് മുമ്പ് പവിഴപ്പുറ്റുകളിൽ നിന്ന് കഴിയുന്നത്ര മാലിന്യം ശേഖരിക്കാൻ നിങ്ങളുടെ വിആർ റോബോട്ടിനെ കോഡ് ചെയ്യുക.