
3과: 빨간색이 감지되었을 때
VR 로봇이 빨간색을 감지하면 무엇을 해야 하는지 알려주는 명령은 없습니다. 빨간색 테두리를 피하기 위해 VR 로봇은 빨간색을 감지하면 후진하여 방향을 바꿔야 합니다. 이 영상에서처럼요.
비디오 파일
-
다운 아이 센서가 빨간색 테두리를 감지했을 때 어떤 일이 일어날지 나타내기 위해while루프의 끝에 주석을 추가합니다. 이제 프로젝트는 다음과 같이 보일 것입니다.
def main(): # 빨간색 테두리가 감지되지 않는 동안 건물을 찾습니다. while not down_eye.detect(RED): # 거리 센서가 성을 감지합니까? if front_distance.found_object(): # 거리 센서 에서 감지된 충돌 성 drivetrain.drive(FORWARD) else: # 거리 센서를 사용하여 성을 찾기 위해 회전 drivetrain.turn(RIGHT) wait(5, MSEC) # 빨간색 테두리가 감지되면 후진 및 회전 -
VR 로봇이 다운 아이 센서가 빨간색을 감지하면 후진하고 회전할 수 있도록 주석 아래에 drive_for및 turn_for 명령을 추가합니다.
def main(): # 빨간색 테두리가 감지되지 않는 동안 건물을 찾습니다. while not down_eye.detect(RED): # 거리 센서가 성을 감지합니까? if front_distance.found_object(): # 거리 센서가 감지한 충돌 성 drivetrain.drive(FORWARD) else: # 거리 센서를 사용하여 성을 찾아 회전 drivetrain.turn(RIGHT) wait(5, MSEC) # 빨간색 테두리가 감지되면 후진하고 회전 drivetrain.drive_for(REVERSE, 300, MM) drivetrain.turn_for(RIGHT, 90, DEGREES) - 아직 열려 있지 않으면 Dynamic Castle Crasher Playground을 열고 프로젝트를 실행합니다. VR 로봇이 의도한 대로 동작하나요?
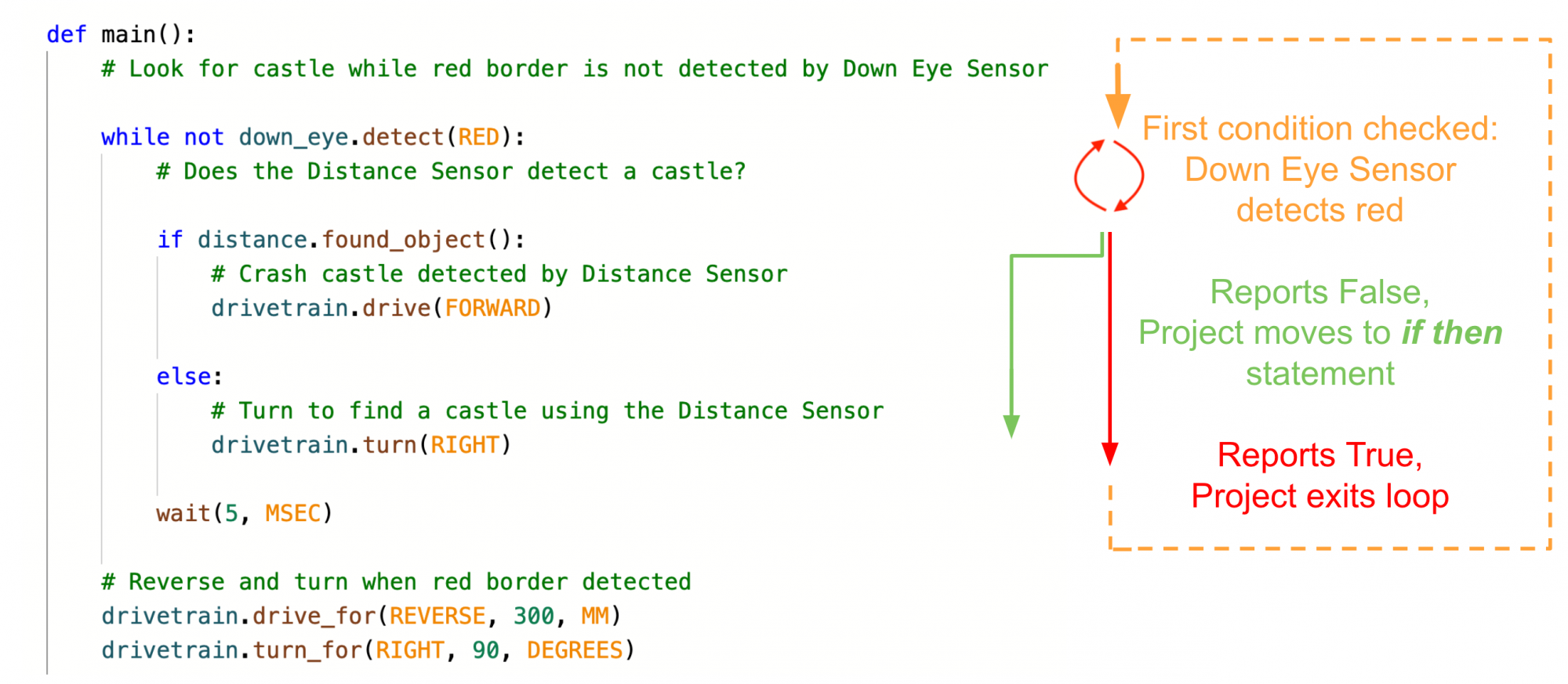
- 이 프로젝트를 실행하면 두 가지 조건이 확인됩니다. 첫 번째는 다운 아이 센서가 while 루프 안에서 빨간색을 감지하는 조건입니다. 다운 아이 센서가 빨간색을 감지하지 못하면 프로젝트 흐름이 다음 감지 조건인 ONLY 로 넘어갑니다. 다운 아이 센서가 빨간색을 감지하면 프로젝트 흐름은 if else 문을 건너뛰고 후진 주행 및 회전으로 넘어갑니다.
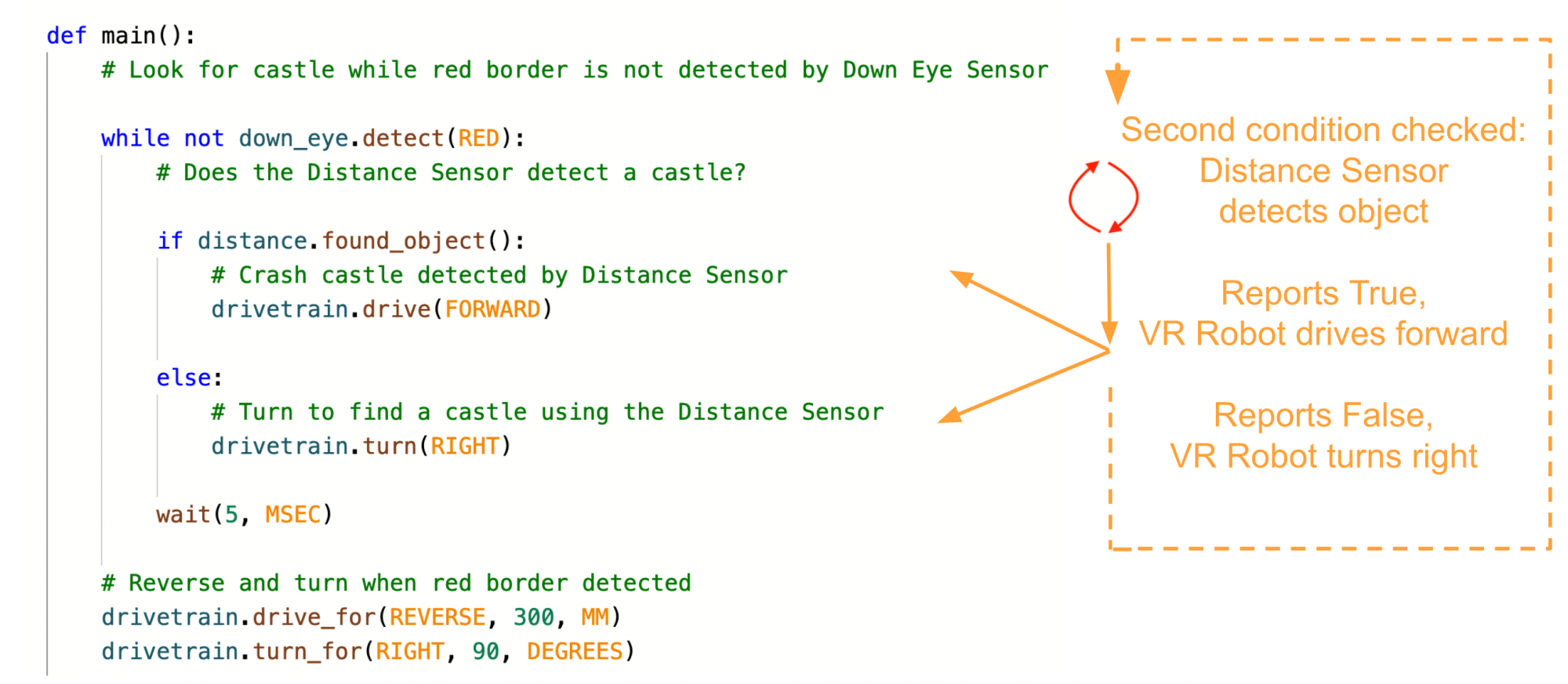
- 두 번째로 검사되는 조건은if else문입니다. 다운 아이 센서가 빨간색을 감지하지 못하는 동안, 프로젝트는while루프를 계속 진행하여 거리 센서의 상태를 확인합니다. VR 로봇은 거리 센서의 데이터를 사용하여 전진할지 우회전할지 결정합니다.
-
하지만 다운 아이 센서가 빨간색을 감지하면 VR 로봇은 후진 주행하고, 방향을 바꾼 후 멈춥니다. 이것으로 프로젝트 흐름이 끝납니다. 동작을 다시 반복하는 데 사용되는 루프가 없습니다.

무한 while 루프 추가
-
동작이 루프에서 반복되려면 무한 while루프가 필요합니다. 프로젝트 맨 위에 while 루프를 드래그하거나 입력한 다음, 조건을 True로 설정하여 무한 루프를 만듭니다. 그런 다음, 이전 코드를 무한 while루프 안에 복사하여 붙여넣습니다. 명령이 올바른 헤더 아래에 제대로 들여쓰기 되었는지 확인하세요. 그렇지 않으면 프로젝트가 예상대로 실행되지 않을 수 있습니다. 이제 프로젝트는 다음과 같이 보일 것입니다.
def main(): while True: # 빨간색 테두리가 감지되지 않는 동안 건물을 찾습니다. while not down_eye.detect(RED): # 거리 센서가 성을 감지합니까? if front_distance.found_object(): # 거리 센서가 감지한 충돌 성 drivetrain.drive(FORWARD) else: # 거리 센서를 사용하여 성을 찾아 회전 drivetrain.turn(RIGHT) wait(5, MSEC) # 빨간색 테두리가 감지되면 후진하고 회전 drivetrain.drive_for(REVERSE, 300, MM) drivetrain.turn_for(RIGHT, 90, DEGREES) - 아직 열려 있지 않으면 Dynamic Castle Crasher Playground을 열고 프로젝트를 실행합니다. VR 로봇이 의도한 대로 동작하나요?
-
이 프로젝트가 실행되면 VR 로봇은 감지된 성을 향해 주행하고, 성이 보고되지 않으면 오른쪽으로 방향을 돌립니다. 다운 아이 센서가 빨간색을 감지하면 VR 로봇은 후진하여 방향을 바꾸고 다른 성을 향해 계속 주행합니다.
