
이 빌드에 기어 적용
1단계: V5 기어 박스 빌드의 단일 레이어에 있는 기어
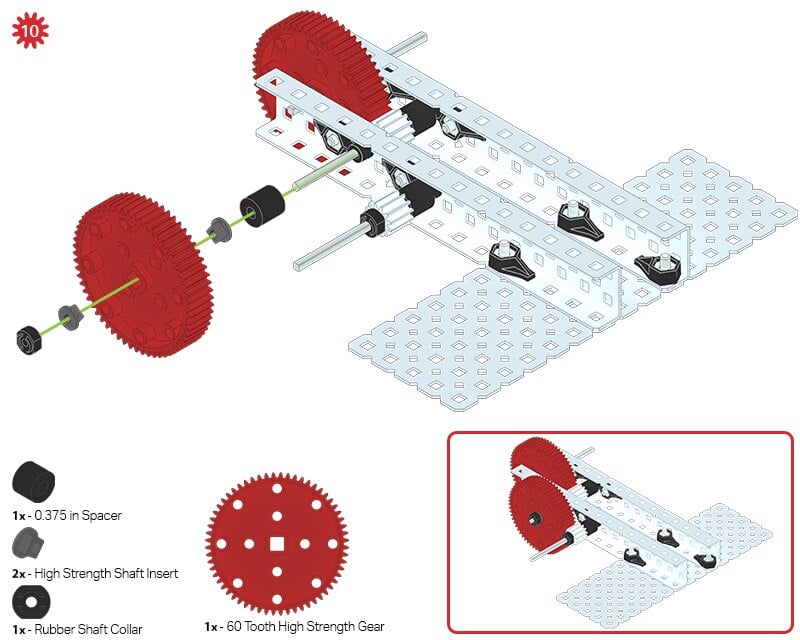
기어박스의 모든 층에 12-치 기어를 60-치 기어로 메쉬했습니다. 샤프트 잠금 플레이트를 돌리면 60-치 기어가 회전하는 샤프트에 있습니다. 60치 기어가 회전하면 12치 기어가 회전합니다. 즉, 기어 박스의 이쪽에는 60-투스 기어가 구동 기어이고 12-투스 기어가 구동 기어입니다. 빌드에서 60-치 기어가 12-치 기어를 구동하는 3곳을 찾습니다. 힌트: 어떤 샤프트를 돌리느냐가 중요합니다. 휠이나 다른 샤프트 잠금 부품까지 확장된 샤프트 칼라를 사용하면 작업이 더 쉬워집니다.
큰 기어에는 이빨이 5배 더 많으므로 기어비는 5:1입니다. 즉, 작은 기어가 5바퀴 돌 때마다 큰 기어가 1바퀴 돌게 됩니다.
![]() 교사 도구 상자
교사 도구 상자
학생들에게 60개 이빨 기어가 12개 이빨 기어를 구동하는 세 위치를 찾으라고 요구합니다. 60개의 이빨을 가진 기어는 구조상 쉽게 알아볼 수 있습니다. 이 조립품의 모든 60개 이빨 기어는 12개 이빨 기어를 구동하지만, 60개 이빨 기어를 돌리는 샤프트를 돌릴 때만 구동됩니다. 다른 샤프트는 12개 이빨 기어를 돌리고, 이 기어는 60개 이빨 기어를 구동합니다.
2단계: 속도를 높이기 위한 입력으로 더 큰 기어 사용
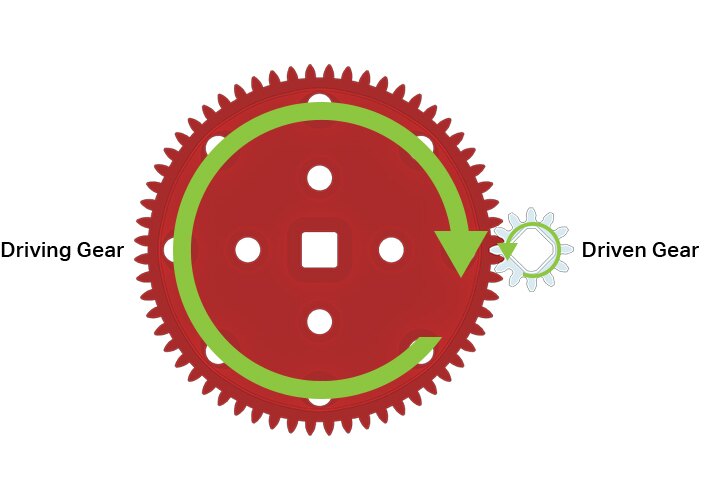 60-튜스 기어를
60-튜스 기어를 60 톱니 기어를 사용하여 차축 주위에 12 톱니 기어 속도를 구동합니다. 위의 예에서는 대형 기어를 돌리거나 구동하고 있습니다. 더 큰 드라이빙 기어의 경우 1턴마다 더 작은 기어가 5번 돌아야 합니다. 즉, 5: 1의 기어 비율로 인해 작은 기어가 큰 기어보다 5배 빠르게 회전합니다. 이것은 높은 기어비로 알려져 있습니다. 비율은 1: 1보다 높습니다.
3단계: 토크 증가를 위한 입력으로 더 작은 기어 사용
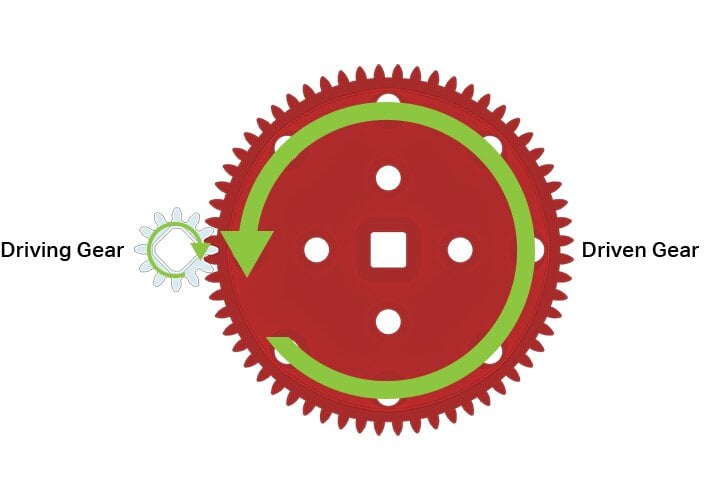 12치 기어를
12치 기어를 토크는 중심점에 대해 무언가를 얼마나 세게 돌리는지를 나타내는 척도입니다. 푸시의 힘에 푸시가 중심점에서 얼마나 떨어져 있는지를 곱하여 계산할 수 있습니다. 더 작은 구동 기어의 톱니는 중앙에 가깝기 때문에 동일한 양의 토크로 더 많은 힘을 가합니다. 동시에, 구동 기어의 이빨은 중심점에서 멀리 떨어져 있으므로 같은 양의 힘이 더 큰 토크를 생성합니다.
더 큰 구동 기어가 있는 경우 샤프트에 적용해야 하는 토크는 더 작은 기어를 구동하는 경우보다 훨씬 높습니다. 동일한 샤프트에 여러 기어를 부착할 수 있기 때문에 동일한 토크에서 힘의 양을 조정할 수 있으므로 각 링크에서 더 높은 토크를 얻을 수 있습니다. V5 기어 박스의 각 단계에서 생성되는 기어비는 1: 5로 낮은 기어비입니다. 구동 기어를 움직이려면 구동 기어가 더 멀리 회전해야 하지만 구동 기어를 더 세게 밀게 됩니다.
![]() 토론을 촉진하다
토론을 촉진하다
이전 두 단계에서는 중요한 정보가 제공되었습니다. 이 논의는 해당 정보를 간략하게 요약한 것으로 볼 수 있습니다.
질문:구동 기어가 피동 기어보다 클 때, 피동 기어의 속도가 더 빠른가, 아니면 토크가 더 큰가? 왜 그럴까요?
A:구동 기어는 큰 구동 기어가 한 번 회전하는 동안 여러 번 회전하기 때문에 속도가 더 빠릅니다.
질문:구동 기어가 피동 기어보다 작을 때, 피동 기어의 속도가 더 빠른가, 아니면 토크가 더 큰가? 왜?
A:구동 기어의 이가 중심점에서 떨어진 거리가 구동 기어의 이가 중심점에서 떨어진 거리보다 멀기 때문에 구동 기어의 토크가 더 큽니다.
4단계: 기계적 이점 곱하기
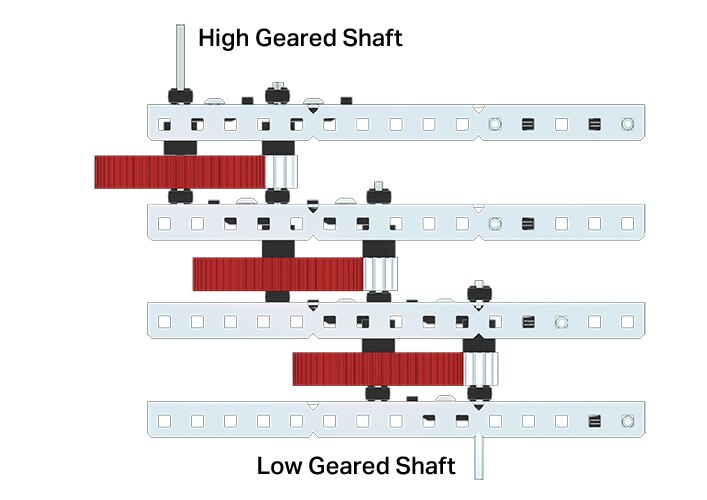
각 스테이지에는 5: 1 기어 비율이 있으므로 5x5x5: 1x1x1 또는 입력 샤프트와 출력 샤프트 간의 125: 1 비율을 만들기 위해 함께 곱할 수 있습니다. 즉, 하이기어 샤프트를 1번 돌리면 출력 샤프트가 125번 회전합니다! 반면에 낮은 기어의 샤프트에 토크를 가하면 출력 샤프트는 125배 높은 토크로 출력하지만 매우 느리게 출력됩니다.
높은 기어의 샤프트를 저항 없이 돌려보세요. 출력축은 얼마나 빨리 회전합니까?
출력축을 잡은 상태에서 저단 기어축을 돌려보세요. 출력 샤프트가 회전하는 것을 막을 수 있습니까?
![]() 교사 팁
교사 팁
-
학생들에게 저단 기어 샤프트를 돌리라고 지시합니다. 일부 학생들은 복합 기어비로 인해 발생하는 엄청난 토크 때문에 기어를 돌리는 데 어려움을 겪을 수 있습니다.
-
학생들에게 높은 기어 샤프트를 돌리라고 합니다. 그 결과, 낮은 기어의 샤프트가 눈에 띄게 빠른 속도로 회전하게 됩니다.
-
이 기계의 동작은 125:1이라는 극단적인 복합 기어비로 인해 발생한다고 설명하세요.
-
복합 기어비는 일반적으로 단일 기어비보다 필요한 기계적 이점이 클 때 사용된다는 점을 강조합니다.
![]() 학습을 확장하세요
학습을 확장하세요
이 활동을 확장하려면 이 실험의 정보와 아래 공식을 사용하여 주어진 기어비의 출력 속도와 출력 토크를 계산하세요.
공식:
기어 감속 = 구동 기어 이빨 / 구동 기어 이빨
출력 토크 = 입력 토크 x 기어 감속
출력 속도 = 입력 속도 / 기어 감속
VEX V5 Classroom Super Kit 내에서 생성할 수 있는 비율을 사용하세요.
예:
기어비 = 60:12 또는 5:1
기어 감속 = 구동 기어 이빨 / 구동 기어 이빨 = 12 / 60 = 0.2
출력 토크 = 입력 토크 x 기어 감속 = 1.5 Nm x 0.2 = 0.3 Nm
출력 속도 = 입력 속도 / 기어 감속 = 100 RPM / 0.2 = 500 RPM