
Achtergrond
In deze unit maken studenten kennis met de functies van VEX GO, door de Code Base te bouwen en de bijbehorende iteraties uit te voeren, zodat ze op verschillende manieren kunnen navigeren. Door de overstap te maken van het besturen van de Code Base via afstandsbediening, in de rijmodus, naar rijden via code, tot rijden met behulp van sensorgegevens, kunnen studenten hun begrip van de componenten en functies van VEX GO en VEXcode GO verder ontwikkelen.
Welke functies zijn beschikbaar in VEXcode GO?
VEXcode GO is het op blokken gebaseerde coderingsplatform voor VEX GO. Om VEXcode GO met uw robot te kunnen gebruiken, moet u deze op uw apparaat instellen. Zie het artikel VEXcode GO VEX-bibliotheek instellen voor meer informatie, als u dat nog niet hebt gedaan.
VEXcode GO bevat veel functies die leerlingen kunnen ondersteunen bij het leren over coderen en STEM-concepten in de module.
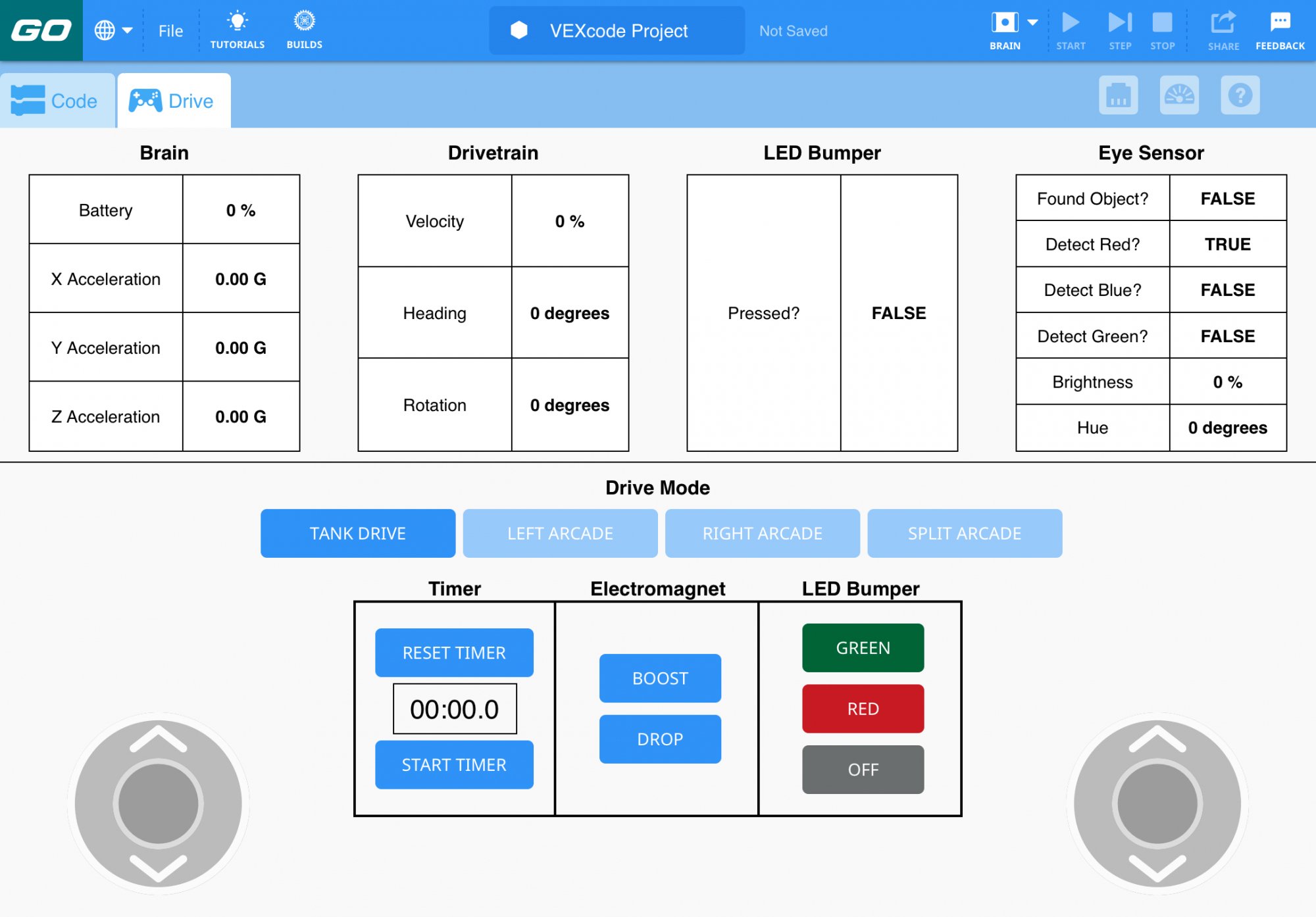
Het tabblad Drive - Lab 1 laat studenten kennismaken met het besturen van de Code Base met behulp van de functie voor afstandsbediening, Drive Mode, die zich op het tabblad Drive bevindt. Met de Drive-modus kunnen leerlingen hun Code Base direct besturen wanneer ze hun Brain aansluiten op hun apparaat, omdat deze vooraf is geconfigureerd voor de Code Base. Voor meer gedetailleerde informatie over het gebruik van het tabblad Station, zie het artikel De afstandsbediening gebruiken in VEXcode GO VEX-bibliotheek.
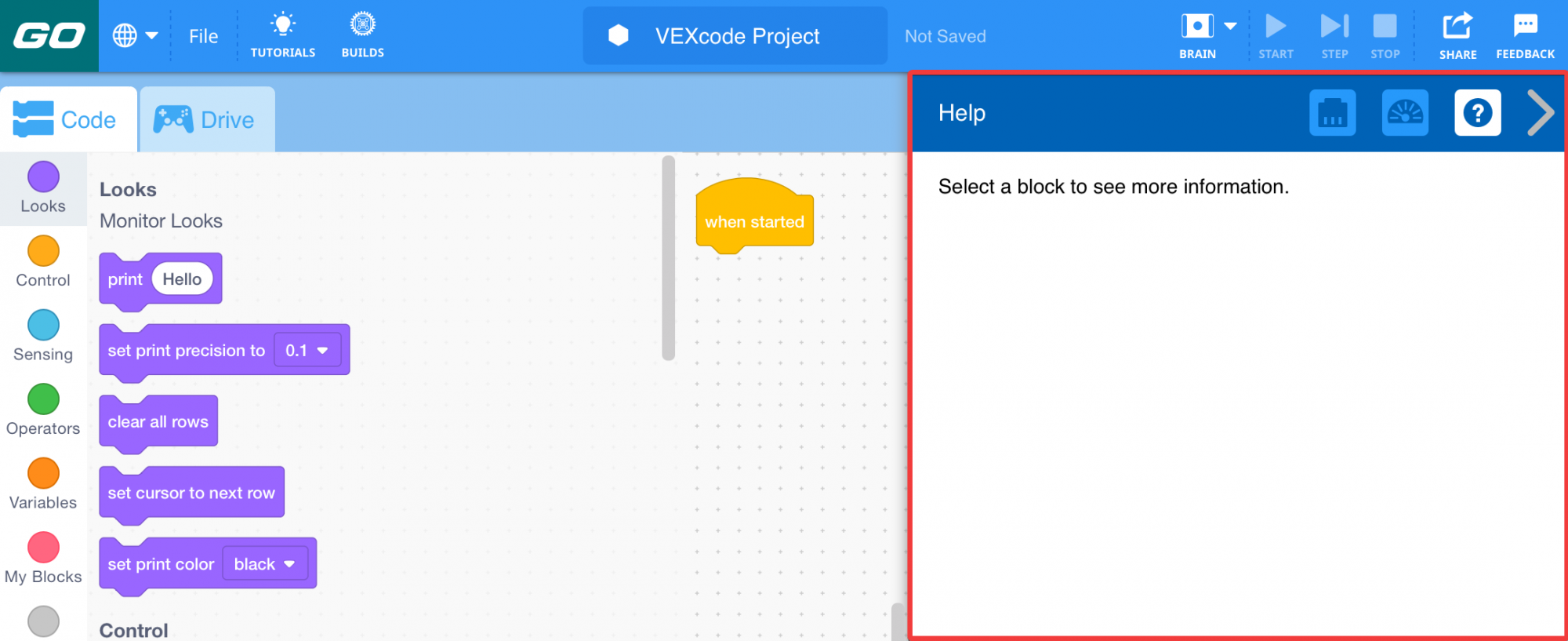
Het Helpvenster - De Helpfunctie van VEXcode GO kan worden gebruikt om meer uitleg te geven over een blok terwijl u in VEXcode GO werkt. Open eenvoudigweg het Helpvenster en selecteer het blok waarover u meer wilt weten. Studenten kunnen deze functie gebruiken terwijl ze aan het werk zijn, om problemen met hun eigen projecten op te lossen. Voor meer informatie over VEXcode GO Help, zie het artikel Toegang tot Help VEX-bibliotheek.
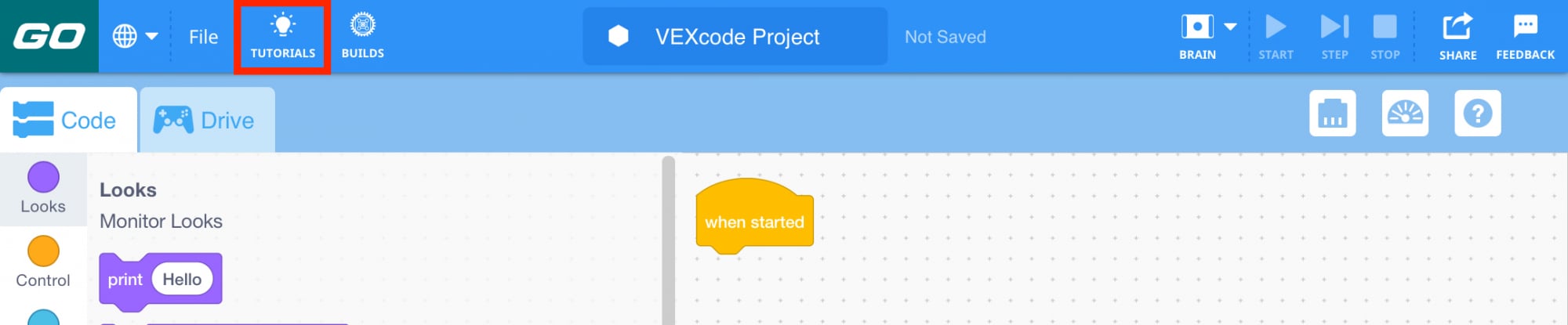
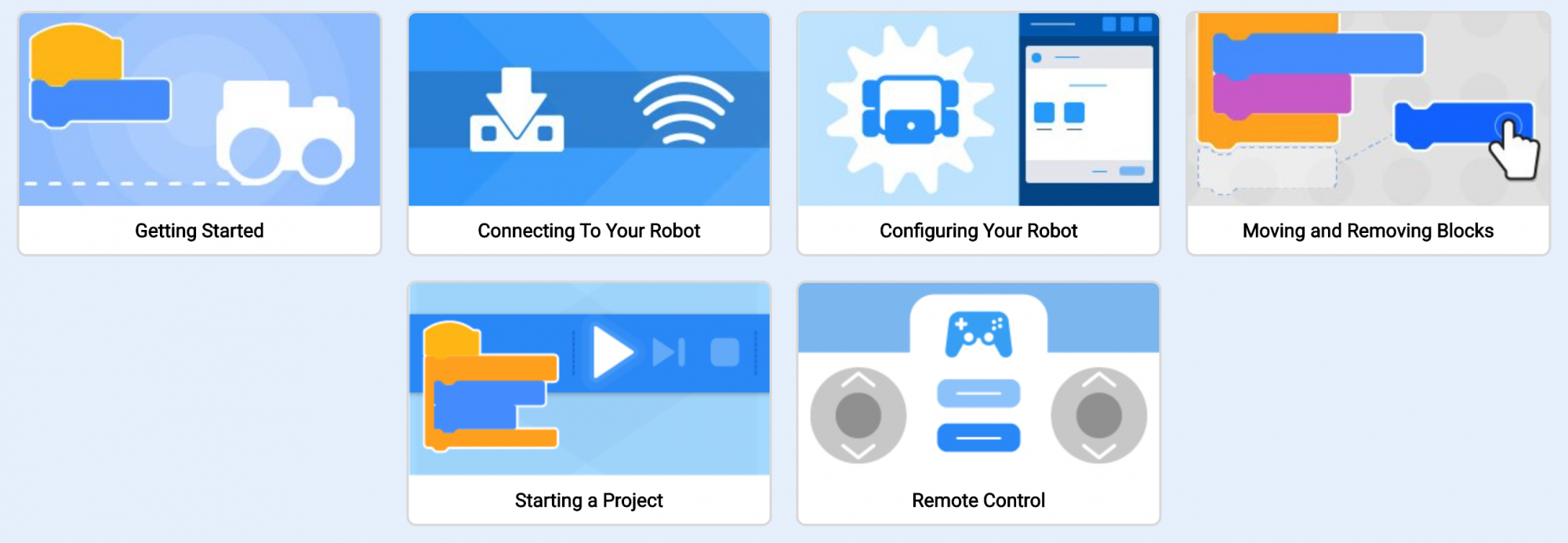
De tutorials - De tutorials zijn korte uitlegvideo's die laten zien hoe je verschillende dingen in VEXcode GO kunt doen. Ze zijn ingesloten in VEXcode GO en kunnen worden bekeken door 'Tutorials' te selecteren in de werkbalk.
U kunt leerlingen op elk gewenst moment naar de instructievideo's verwijzen als ze hulp nodig hebben bij bijvoorbeeld het verbinden met hun robot of het verplaatsen of verwijderen van blokken uit een project. Door leerlingen eraan te herinneren eerst de instructievideo's te bekijken voor antwoorden op hun vragen, kunt u zelf tijd vrijmaken om andere leerlingen te helpen die op andere niveaus werken.
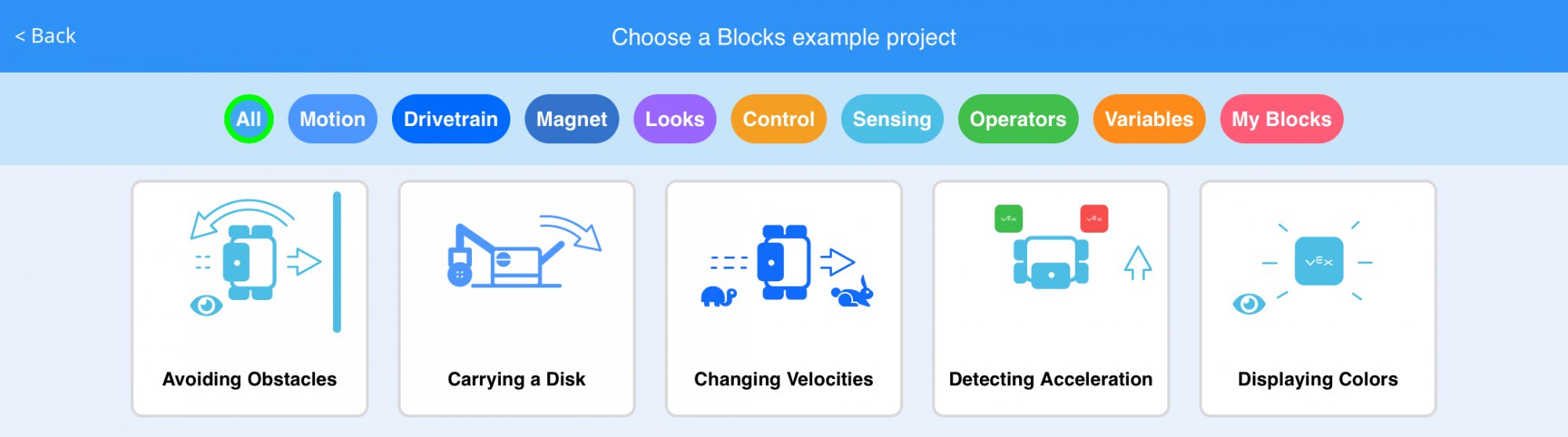
De voorbeeldprojecten - Dit zijn projecten die in VEXcode GO zijn ingebouwd om verschillende manieren te laten zien om uw robot te coderen. Ze vormen vaak de basis voor het werk van studenten in STEM Labs, zo ook in deze unit. U kunt voorbeeldprojecten ook gebruiken als een differentiatiebron voor leerlingen die meer tijd nodig hebben om een bepaald coderingsconcept te oefenen, of voor hen die erop kunnen voortbouwen om een concept dieper te verkennen. U kunt op elk gewenst moment toegang krijgen tot de voorbeeldprojecten door het menu Bestand en 'Voorbeelden openen' te selecteren.
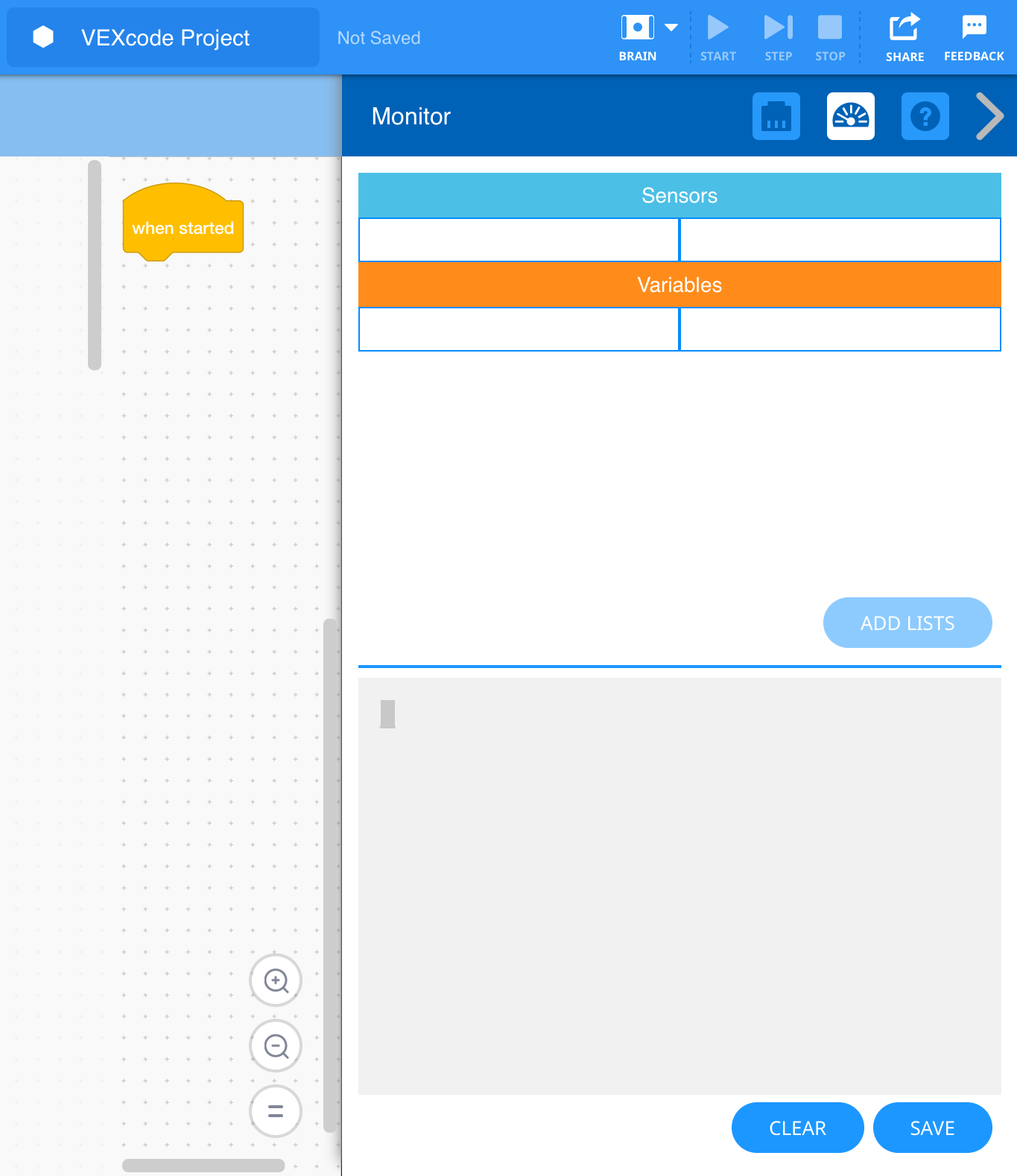
Het monitorvenster - De monitorconsole in het monitorvenster biedt studenten een andere manier om in realtime te zien wat er gebeurt in een project, met een sensor of met hun robot. In Lab 4 van deze eenheid wordt de Monitor Console uitgelicht als een manier om studenten de gegevens te laten zien die de oogsensor rapporteert. Zo krijgen ze een visuele verbinding met de acties van de sensor (die anders niet zichtbaar zijn). Voor meer informatie over deze functie van het Monitorvenster, zie het artikel Monitoring van variabele en sensorwaarden in VEXcode GO VEX-bibliotheek.
Wat is een sensor?
Een sensor is in feite een apparaat dat de robot helpt de wereld om zich heen te begrijpen. Dit doet de robot door gegevens over zijn omgeving te verzamelen en te rapporteren. Deze gegevens kunnen vervolgens in een project worden gebruikt om de robot beslissingen te laten nemen of bepaald gedrag te laten vertonen. Deze volgorde wordt vaak de Sense → Think → Act-beslissingslus genoemd.
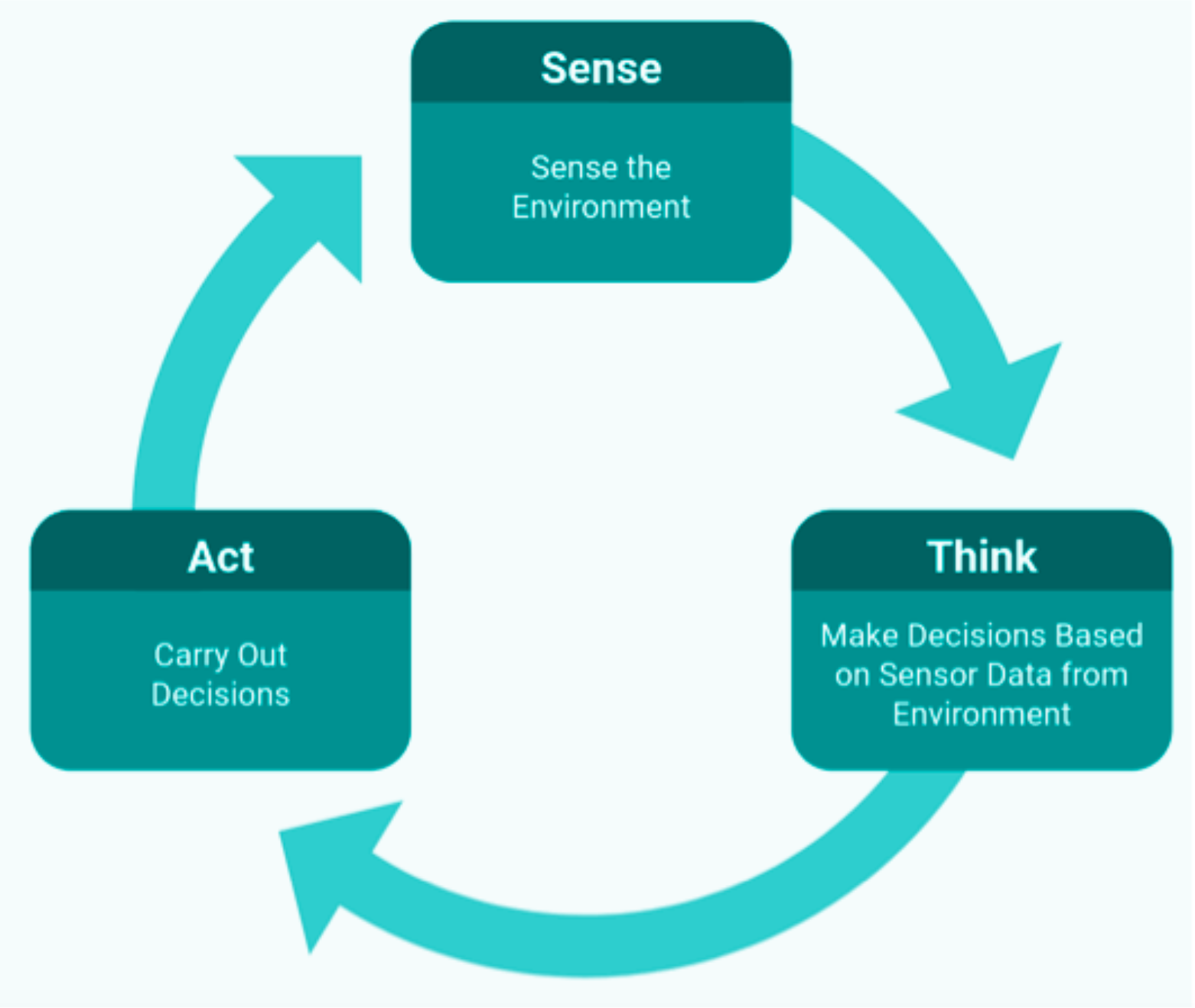
In Lab 4 wordt de Eye Sensor bijvoorbeeld gebruikt in een project om de kleur van een object te detecteren (sense), te bepalen welke vertakking van het project gevolgd moet worden (think) en vervolgens de Code Base te verplaatsen op basis van de kleur (act).
Welke VEX GO-sensoren worden in dit apparaat gebruikt?
De LED Bumper is een sensor die fysiek contact kan detecteren (ongeacht of de LED Bumper is ingedrukt of losgelaten) en kleuren kan weergeven (rood, groen of uit). In projecten kan het worden gebruikt als een schakelaar, waarbij het indrukken of loslaten van de LED-bumper een bepaald gedrag veroorzaakt, zoals in Lab 3. Voor meer gedetailleerde informatie over de werking van de LED Bumper, zie het artikel codering met de VEX GO LED Bumper VEX-bibliotheek.
De Eye Sensor is een sensor die drie dingen kan vaststellen: de aanwezigheid van een object, de kleur ervan en de helderheid van een object of oppervlak. In Lab 4 van deze eenheid wordt de oogsensor gebruikt om een object en de kleur ervan te detecteren, zodat je door een kleurenschijfdoolhof kunt navigeren. De gegevens die de oogsensor rapporteert, zijn te zien in de monitorconsole. Deze biedt leerlingen een visuele weergave van wat de robot 'ziet'. Deze gegevens kunnen worden gebruikt om de verbinding te leggen tussen de sensoren en het gedrag van de robot. Voor meer informatie over de oogsensor en hoe deze werkt, zie het artikel Codering met de VEX GO oogsensor VEX-bibliotheek.