
Lição 3: Adicionando o Sensor do Olho para Baixo
Na lição anterior, o sensor de distância foi usado para determinar se o robô VR detectou um objeto ou não e, em caso afirmativo, avançou em direção ao objeto. No entanto, nenhum valor de sensor foi usado para determinar se o Robô VR estava perto da borda do Playground para pará-lo. Parar o Robô de RV quando estivesse perto da borda do Playground impediria que ele saísse do lado.
Como está, o projeto repete os comportamentos de avançar e virar, para sempre. No entanto, não há condição de verificar a borda vermelha ao redor do Playground. Assim, o Robô VR pode cair do Playground ao dirigir para frente.
Adicionar o sensor de olho para baixo
Outro sensor é necessário para que o Robô VR possa determinar se está perto da borda do Playground ou não. O Sensor de Down Eye pode ser usado para determinar se o Robô VR está perto da borda do Playground, detectando a borda vermelha ao redor do Playground.
Os comportamentos de dirigir para frente e girar só precisam ser repetidos até que o Sensor do Olho para Baixo informe que a borda vermelha foi detectada. Assim, o ciclo infinito while pode ser substituído por um ciclo while com uma condição e não , de forma a repetir os comportamentos de avançar e virar até à condição de detetar o vermelho fronteira é cumprida.
-
Carregue o projeto Unit9Lesson2 da lição anterior.
def main(): while True: # O sensor de distância detecta um castelo? if front_distance.found_object(): # Castelo de colisão detectado pelo sensor de distância drivetrain.drive (FORWARD) else: # Vire para encontrar um castelo usando o sensor de distância drivetrain.turn (RIGHT) wait(5, MSEC) - Renomeie o projeto Unit9Lesson3.

-
Adicione um comentário para observar como o loop enquanto será utilizado com o sensor de olho para baixo. O seu projeto deve agora ter este aspeto:
def main(): # Procure construir enquanto a borda vermelha não é detectada enquanto True: # O Sensor de Distância detecta um castelo? if front_distance.found_object(): # Castelo de colisão detectado pelo sensor de distância drivetrain.drive (FORWARD) else: # Vire para encontrar um castelo usando o sensor de distância drivetrain.turn (RIGHT) wait(5, MSEC) -
É necessário um comando para verificar continuamente o Sensor do Olho para Baixo. O robô VR precisará repetir esses comportamentos enquanto o sensor Down Eye não detectar a cor vermelha. Altere a condição do ciclo while colocando a palavra-chave not à frente da condição. O seu projeto deve agora ter este aspeto:
def main(): # Procure construir enquanto a borda vermelha não é detectada enquanto não for Verdadeiro: # O Sensor de Distância detecta um castelo? if front_distance.found_object(): # Castelo de colisão detectado pelo sensor de distância drivetrain.drive (FORWARD) else: # Vire para encontrar um castelo usando o sensor de distância drivetrain.turn (RIGHT) wait(5, MSEC) -
Em seguida, altere a condição de True para o comando down_eye.detect. Defina o parâmetro para 'VERMELHO'. O seu projeto deve agora ter este aspeto:
def main(): # Procure construir enquanto a borda vermelha não é detectada enquanto não estiver down_eye.detect(VERMELHO): # O sensor de distância detecta um castelo? if front_distance.found_object(): # Castelo de colisão detectado pelo sensor de distância drivetrain.drive (FORWARD) else: # Vire para encontrar um castelo usando o sensor de distância drivetrain.turn (RIGHT) wait(5, MSEC) - Abra o Dynamic Castle Crasher Playground, se ainda não estiver aberto, e execute o projeto. O robô de RV se comporta como você pretendia?
-
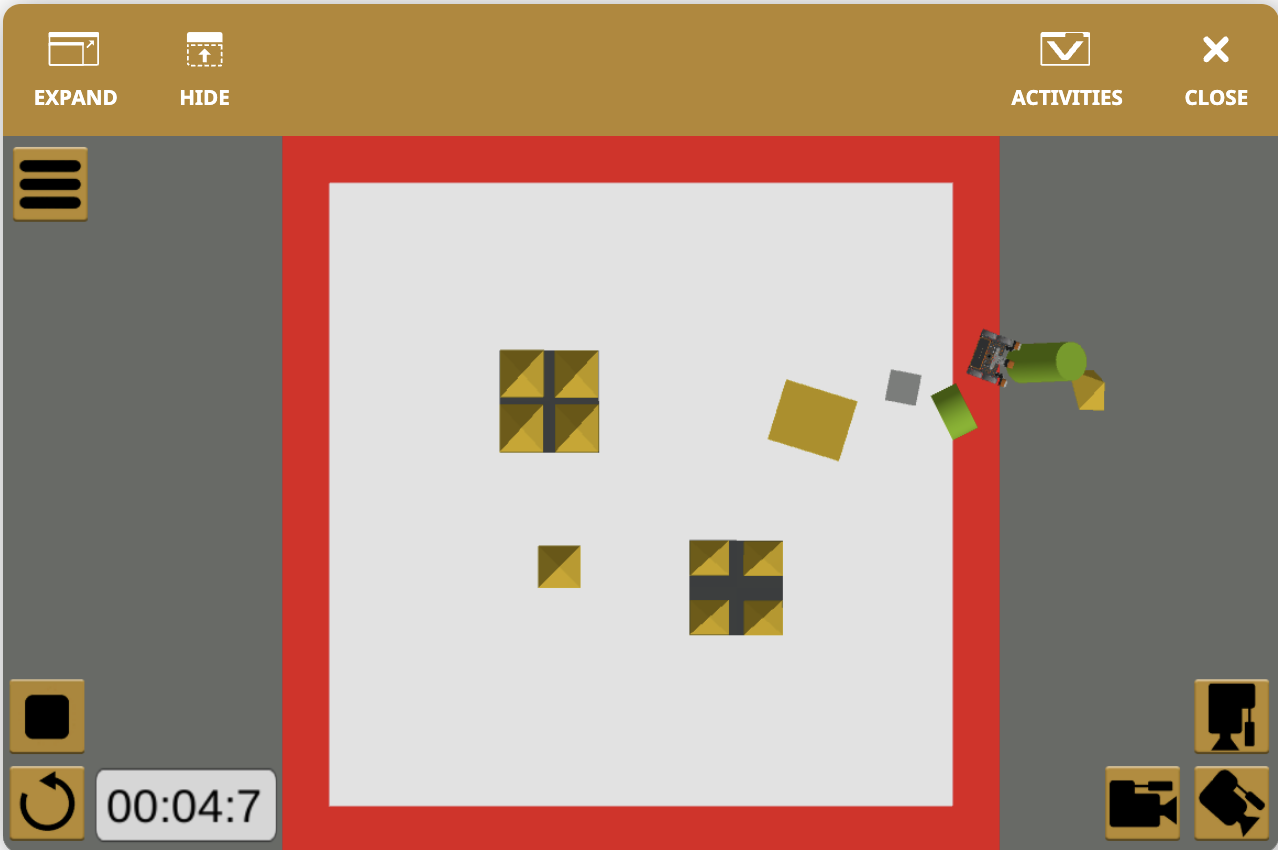
Quando este projeto é executado, o Robô VR irá conduzir em direção a um objeto detectado e virar à direita caso contrário. No entanto, mesmo que o Down Eye Sensor esteja procurando a borda vermelha, o Robô VR não recebe instruções sobre o que fazer quando detecta vermelho, então ele continua dirigindo e eventualmente cai do Playground.
Assim que a condição do ciclo while for satisfeita, o fluxo do projeto será executado fora do ciclo the while.
Selecione o botão Seguinte para continuar com o resto desta lição.