
CS Nível 1 - VEXcode VR Python
9 Unidades
Continue sua jornada na Ciência da Computação com a codificação baseada em texto no VEXcode VR Python! Usando um robô de RV para resolver vários desafios de codificação, os alunos aprenderão sobre o fluxo, loops, condições e algoritmos do projeto em Python.
Aceda ao desenvolvimento profissional contínuo para o apoiar enquanto ensina com o VEXcode VR. PD atempada e direcionada através de vídeos, aulas, conversas na comunidade e muito mais!

Unidade 1
Introdução e Fundamentos
Esta unidade mostra o valor do VEXcode VR e como é fácil de usar. Esta unidade também descreve a estrutura do curso, dando-lhe uma prévia do que é de se esperar, e fornecendo-lhe as ferramentas para ser bem sucedido.

Unidade 2
Movendo o seu robô
Nesta Unidade, você resolverá o desafio Castle Crasher. Você aprenderá a usar o Python para fazer com que o robô VR use os comandos Drivetrain para se mover pelo Castle Crasher Playground. Você também aprenderá a sequenciar comandos corretamente para derrubar todos os castelos no parquinho.
Unidade 3
Comportamentos repetidos
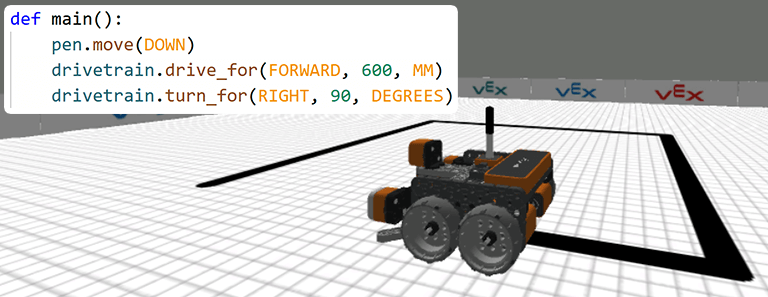
Nesta Unidade, você resolverá o Desafio Desenhar uma Casa. Você aprenderá a usar a ferramenta Caneta em um Robô de RV para desenhar diferentes formas no Art Canvas Playground. Você também aprenderá como usar loops em Python para repetir um conjunto de comportamentos várias vezes, como desenhar os lados de um quadrado.
Unidade 4
Navegar num Labirinto
Esta unidade mostrará como usar a entrada do sensor para navegar no robô VR, independentemente do ambiente, em vez de "codificar" o movimento apenas com comandos do sistema de transmissão. Este é um primeiro passo importante para ser capaz de construir um algoritmo eficaz. Você trabalhará no Wall Maze Challenge usando Python para navegar o robô VR pelo Wall Maze Playground do início ao fim. Você aprenderá a usar o Bumper Sensor e o while loop para resolver o Wall Maze Challenge.
Unidade 5
Detectando Paredes à Distância
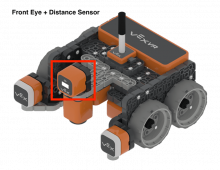
Nesta Unidade, você navegará pelo Robô de RV do início ao fim através do Desafio Labirinto da Parede sem esbarrar nas paredes! Você aprenderá a usar o Sensor de Distância no Robô VR com loops while e operadores de comparação para resolver o desafio do Labirinto de Parede.
Unidade 6
Conhecer a sua localização
Nesta Unidade, você completará o desafio Drive to Three Numbers e usará o Sensor de Localização para navegar o Robô VR para três locais numerados diferentes no Playground Number Grid Map! Você aplicará comandos das categorias Drivetrain, Sensing e Control na sequência correta para resolver o desafio Drive to Three Numbers.
Unidade 7
Decisões com Cores
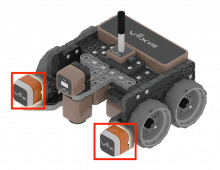
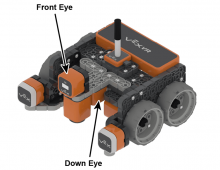
Nesta unidade, você será apresentado à importância das declarações condicionais. Você explorará por que instruções condicionais, como a instrução if, precisam ser usadas com loops infinitos, como loops while infinitos, para que o robô VR se comporte como pretendido. Você aprenderá a usar o sensor ocular e as instruções condicionais para resolver o desafio do labirinto de disco. No Desafio do Labirinto de Disco, o Robô de RV navegará pelo Playground do Labirinto de Disco do início ao fim usando o Sensor de Olhos para detectar cores.
Unidade 8
Mover discos com loops
Nesta unidade, você aprenderá a importância do feedback do sensor e dos loops de aninhamento. Você aprenderá a usar o eletroímã no robô VR para pegar e soltar discos para resolver o desafio do Disk Mover. Você aplicará as habilidades aprendidas nas Unidades anteriores para criar um projeto VEXcode VR que usa sensores e loops de robôs VR para resolver o desafio Disk Mover.
Unit 9
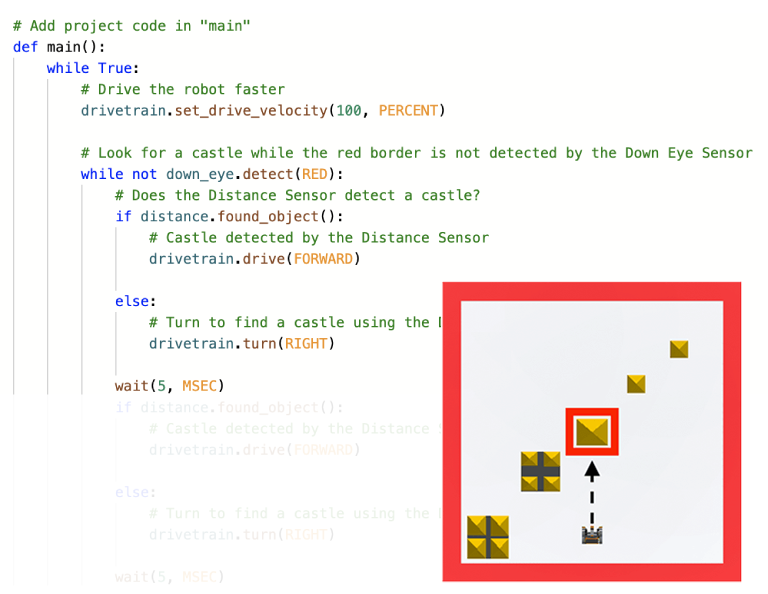
Desenvolvimento de Algoritmos
Esta unidade apresenta algoritmos. Na Unidade 2, você resolveu o Desafio Castle Crasher em um Playground onde o layout não mudou. Nesta Unidade, você terá que resolver o mesmo desafio, mas em um Playground que muda o layout a cada reinicialização. Isso introduz a necessidade de um algoritmo que use feedback do sensor em vez de uma sequência de comandos simples.