
แข่งขัน
ตอนนี้คุณได้ฝึกการใช้เซ็นเซอร์ออปติคอล เพื่อตรวจจับและเก็บลูกบาศก์สีแดงแล้ว คุณก็พร้อมเข้าแข่งขันใน Treasure Mover Challenge แล้ว!
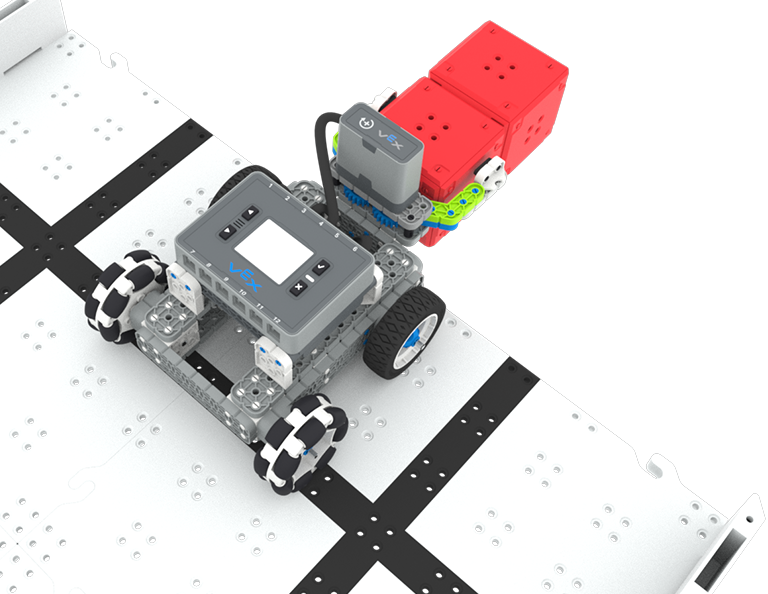
เป้าหมายของความท้าทายการทดลองจับเวลานี้คือให้หุ่นยนต์ของคุณขับเคลื่อนโดยอัตโนมัติเพื่อตรวจสอบลูกบาศก์ทั้งหมดบนสนาม และเก็บเฉพาะลูกบาศก์สีแดงไปยังโซนบ้านในเวลาที่เร็วที่สุด ชมแอนิเมชั่นด้านล่างเพื่อดูตัวอย่างว่าหุ่นยนต์ของคุณเคลื่อนไหวได้อย่างไรในการแข่งขันที่ประสบความสำเร็จ
ปฏิบัติตามขั้นตอนในเอกสารนี้เพื่อทำภารกิจ Treasure Mover Challenge ให้สำเร็จ Google / .docx / .pdf
เมื่อคุณทำ Treasure Mover Challenge เสร็จแล้ว ให้ไปติดต่อครูของคุณ ให้แน่ใจว่าคุณได้บันทึกผลลัพธ์ของความท้าทายไว้ในสมุดบันทึกวิศวกรรมของคุณแล้ว
สรุปการสะท้อนความคิด
ตอนนี้คุณได้ใช้เซ็นเซอร์ออปติคอลเพื่อตรวจจับและเก็บลูกบาศก์สีแดง และแข่งขันใน Treasure Hunt Challenge แล้ว ได้เวลาทบทวนสิ่งที่คุณได้เรียนรู้และทำในบทเรียนนี้ เริ่มหน้า ในสมุดบันทึกวิศวกรรมของคุณเพื่อเริ่มต้นการสะท้อนความคิดของคุณ
ให้คะแนนตัวเองในฐานะ ผู้เริ่มหัด ผู้ฝึกหัดหรือ ผู้เชี่ยวชาญ ในแต่ละแนวคิดต่อไปนี้ในสมุดบันทึกวิศวกรรมของคุณ ให้คำอธิบายสั้นๆ ว่าเหตุใดคุณจึงให้คะแนนตัวเองในแต่ละแนวคิดดังนี้:
- วิธีใช้เซ็นเซอร์ออปติคอลเพื่อตรวจจับลูกบาศก์สีแดง
- วิธีการสร้างโปรเจ็กต์ใน VEXcode IQ เพื่อขับและหยิบ Treasure Cube สีแดงและย้ายไปยัง Home Zone
- ทำซ้ำ กับทีมของฉันเพื่อตรวจจับ และย้ายลูกบาศก์สีแดงไปยังโซนบ้าน ในเวลาที่รวดเร็วยิ่งขึ้น
ใช้ตารางนี้เพื่อช่วยคุณกำหนดว่าคุณอยู่ในหมวดหมู่ใด
| ผู้เชี่ยวชาญ | ฉันคิดว่าฉันเข้าใจแนวคิดนี้เป็นอย่างดีและสามารถสอนเรื่องนี้ให้กับคนอื่นได้ |
| ลูกจ้างฝึกงาน | ฉันรู้สึกว่าตนเองเข้าใจแนวคิดเพียงพอที่จะแข่งขันความท้าทายนี้ได้ |
| สามเณร | ฉันรู้สึกว่าฉันไม่เข้าใจคอนเซปต์และไม่รู้ว่าจะทำความท้าทายนี้ให้สำเร็จได้อย่างไร |
ต่อไปจะเป็นอะไร?
ในบทเรียนนี้ คุณได้เพิ่มเซนเซอร์ออปติคอลให้กับหุ่นยนต์ของคุณและเขียนโค้ดให้ตรวจจับลูกบาศก์สีแดง ตอนนี้ถึงเวลาร่วมแข่งขัน Treasure Hunt แล้ว!
ในบทเรียนถัดไปคุณจะได้
- ทบทวนกฎกติกาการแข่งขัน
- พัฒนากลยุทธ์เกม
- เข้าร่วมการแข่งขันล่าสมบัติ!
เลือก < กลับไปที่บทเรียน เพื่อกลับไปยังภาพรวมบทเรียน
เลือก ถัดไป บทเรียน > เพื่อไปต่อที่บทเรียนที่ 4 และเรียนรู้วิธีการเข้าร่วมการแข่งขันล่าสมบัติ!