
竞争
总结反思
现在您已经使用光学传感器检测和收集红色立方体 并参加了寻宝挑战赛,现在是时候反思一下您在本课程中所学和所做的事情了。 在你的工程笔记本中开始一个新的 页来开始你的反思。
对于工程笔记本中的以下每个概念,将自己评为 新手、 学徒或 专家。 简要解释一下您为何对每个概念给予自己这样的评级:
- 如何使用光学传感器检测红色立方体
- 如何在 VEXcode IQ 中创建一个项目来驱动并拾取红色宝藏立方体并将其移动到 Home Zone
- 与我的团队一起迭代 来检测 并以更快的时间将红色立方体移动到主区域
使用此表可以帮助您确定您属于哪个类别。
|
专家 |
我觉得我完全理解了这个概念,并且可以将其教给其他人。 |
| 学徒 | 我觉得我对这个概念的理解足以参加挑战。 |
| 新手 | 我觉得我不明白这个概念,不知道如何完成挑战。 |
下一步是什么?
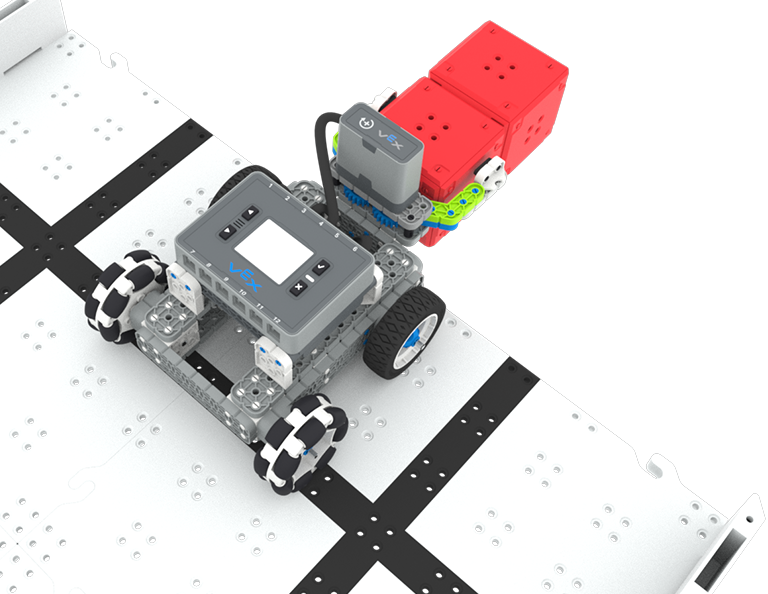
在本课程中,您向机器人添加了光学传感器,并对其进行编码以检测红色立方体。 现在是参加寻宝比赛的时候了!
在下一课中,您将
- 回顾比赛规则
- 制定游戏策略
- 参加寻宝比赛!
选择 < 返回课程 返回课程概述。
选择 下一课 > 继续第 4 课 ,学习如何参加寻宝比赛!