
VEX V5 Ball Launcher

Robot Capabilities
The VEX V5 Ball Launcher includes a Vision Sensor mounted above the robot, angled downward. This robot can be programmed to turn until the Vision Sensor detects a colored ball, and then drive toward it. When the Vision Sensor detects that the robot is close enough to the ball, the robot can pull it in using its intake, and then shoot it out at a target or goal.
This build is not possible without the Vision Sensor, but the Vision Sensor was not created for this build. It was already a technological device that was incorporated into this robot's design in an innovative way.
![]() Extend Your Learning
Extend Your Learning
To expand this activity, ask your students to identify and label the different attachments or design elements incorporated into the design of the V5 Ball Launcher.
Competition Connection - Turning Point
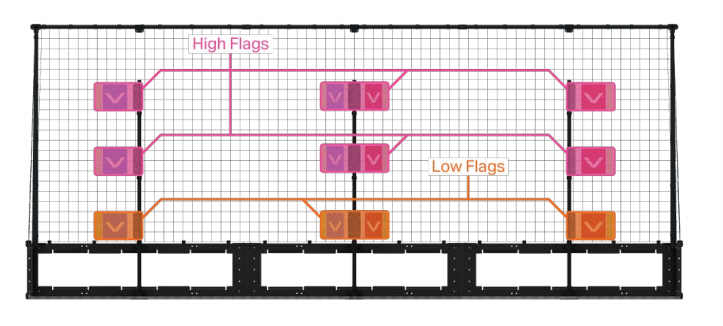
Designing a launcher for a robot is especially useful in a competition setting. The 2018 - 2019 VEX V5 Robotics Competition (V5RC) game Turning Point required players to toggle flags. There were nine flags total: three bottom flags that could be toggled by the robot, and the six high flags that could only be toggled by hitting them with competition ball game pieces.
Therefore, competition teams needed to design a ball launcher that would launch the ball high and hard enough to toggle the flags. If the ball was shot at a flag too hard or not hard enough, the flag might not toggle properly. The launcher would also need the capacity to launch different ball game pieces through the match. There were six flags total that needed to be toggled. If the robot only had the capacity to launch two balls or to launch unlimited balls but only at a rate of one ball at a time, the robot may not have enough time in the match to toggle all six. Some game winning designs included robots that could launch more than one ball at a time in an efficient manner.
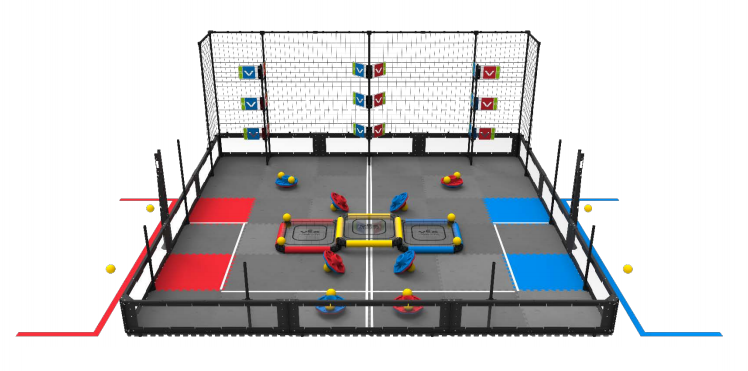
Designing and building a launcher attachment for this game was necessary so that the robot could pick up the yellow ball game pieces and shoot them at the flags to toggle between the red and blue team colors to obtain points.
![]() Motivate Discussion
-
Considering the Design of a Robot
Motivate Discussion
-
Considering the Design of a Robot
Each year, the VEX Robotics Competition introduces a new game. The video presenting the VEX Robotics Competition Tower Takeover: 2019 - 2020 VRC Game can be found at this link. The video for the current year's game can be found at competition.vex.com.
Review the video for the current game's objectives together and before the following discussion.
Q: What abilities does a robot need to perform well in this year's game?
A: Answers will vary but students might first respond with basics: an autonomous program, the ability to drive and turn quickly, etc.
Q: What abilities, features, or attachments does a robot need to win this year's game?
A: Depending on the game, answers related to features and attachments might include a catapult design, slingshot design, conveyor belt design, and/or flywheel design. Answers related to abilities might include the ability to pick up, release, or propel game elements (caps, cubes, flags, balls, etc.) quickly and accurately.
![]() Extend Your Learning
-
Designing Attachments
Extend Your Learning
-
Designing Attachments
When designing attachments for a robot, it is a good practice to see what others have created and found to be successful.
Have students investigate the attachments and build features that others have created.
The best place to find inspiration is in VEX's Forum. The forum can be searched using terms likes "attachment" or more specific terms related to the type of design they are interested in using. If they want more general inspiration, "VEX V5 robot" or similar search terms within any image search engine will return many images that could serve as sources of inspiration.
Have the students choose a type of attachment or design feature to investigate and find two or three inspiring examples. Have them integrate the ideas in those examples into a plan for their robot for this year's competition.