
Robotic Palletizing in Manufacturing
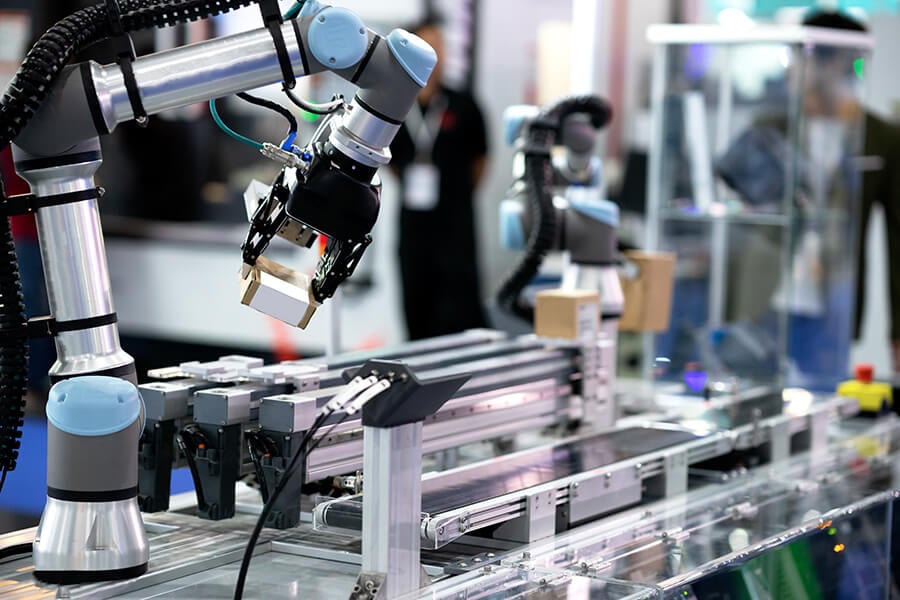
A very common type of industrial robots are pick and place robots. As the name implies, these robots pick up an object in one location and place them in another location. This process can take place at any point along the path of the manufacturing of a product; from bringing in raw materials, moving parts within the manufacturing process, inspecting parts for defects, to packaging and sorting the final product for shipping.
These robots can be designed to pick up extremely large objects, such as entire car chassis, to extremely small objects, such as microchips in an electronics factory. The type of robot configuration of a pick and place robot will depend on the type of job it is required to do. A job which requires a fast rate of work might use a delta robot configuration, whereas, a job which requires some heavy lifting may use an articulated configuration.
Speed, Accuracy, and Repeatability
The speed at which the robot can complete a pick and place function is known as its pick and place cycle. This is the amount of time it takes for a gripper to pick up an object, place it into the desired location, and return to its start position. The speed of the robot is not the only consideration of these types of robots.
Grippers
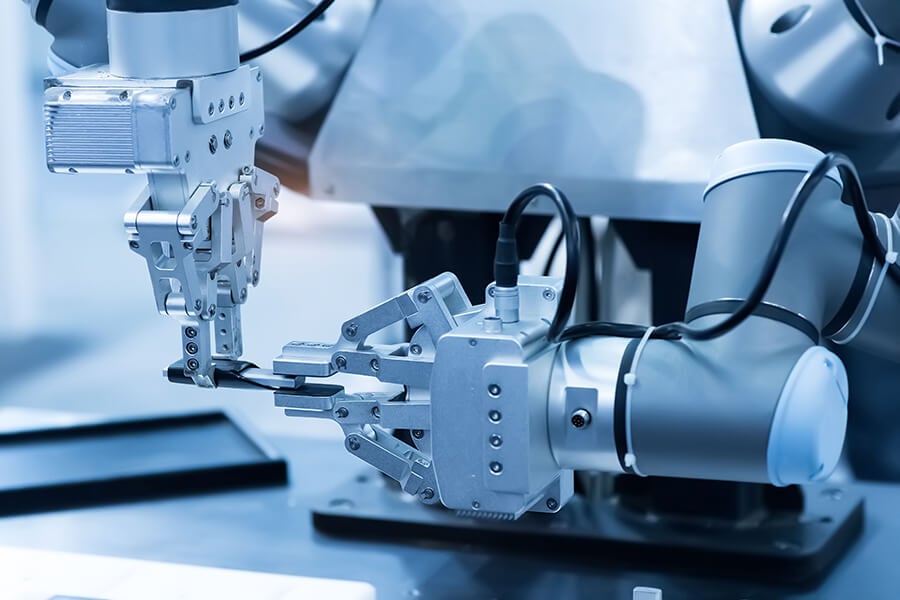
One component which affects these aspects of the robot is the type of gripper the robot is using as its end-of-arm tooling. There are several types of grippers. A common type of gripper uses jaws to grasp an object. An industrial robot could have two, three, or even a ring of jaws to pick up and hold objects.
Multi-Finger and Adaptive Grippers are similar to the jaw grippers, however, they may have sensors to provide information to the controller. This allows them to grasp irregularly shaped or soft objects.
An unusual gripper is the Bellows Gripper. This uses a rubber bladder to contact the object. Compressed air will inflate the bladder grasping the object, then the robot releases the air from the bladder to release the object.
Vacuum cup grippers use a vacuum to grasp the object and then release the object by stopping the vacuum. Industrial robots can also utilize an electromagnet as a gripper, like the Electromagnet on the VEX V5 Workcell.
Palletizing

The process of a pick and place robot is often called palletizing. This is the process of moving parts onto a pallet to be transported. A pallet is a structure which lifts objects off the floor so a forklift or hand lift truck can slide under the load to be easily moved. Robotic palletizing systems automate the process of stacking products onto pallets.
Palletizing by a robot can be done by a worker controlling the robot. However, most of the time vision sensors, color sensors, barcode readers, and other types of sensors control the robot's behavior and how objects are picked and placed. These behaviors can take place by objects being moved on and off of conveyor systems or even having objects passed from one robot to another.
The V5 Workcell assembly can be configured to use sensors in a palletizing process.