
Sort the Disk Using Code
Now that you have coded the arm to pick up the red disk from the pick up location, you will now continue to build on the project to code the arm to sort the red disk into the drop off location.
In VEXcode V5, follow the steps in this video to add a [Joint move] block, a [Wait] block, and enter the coordinates for Point 3.
Use your coordinates for Point 3 and not the ones shown in this video.
Video file

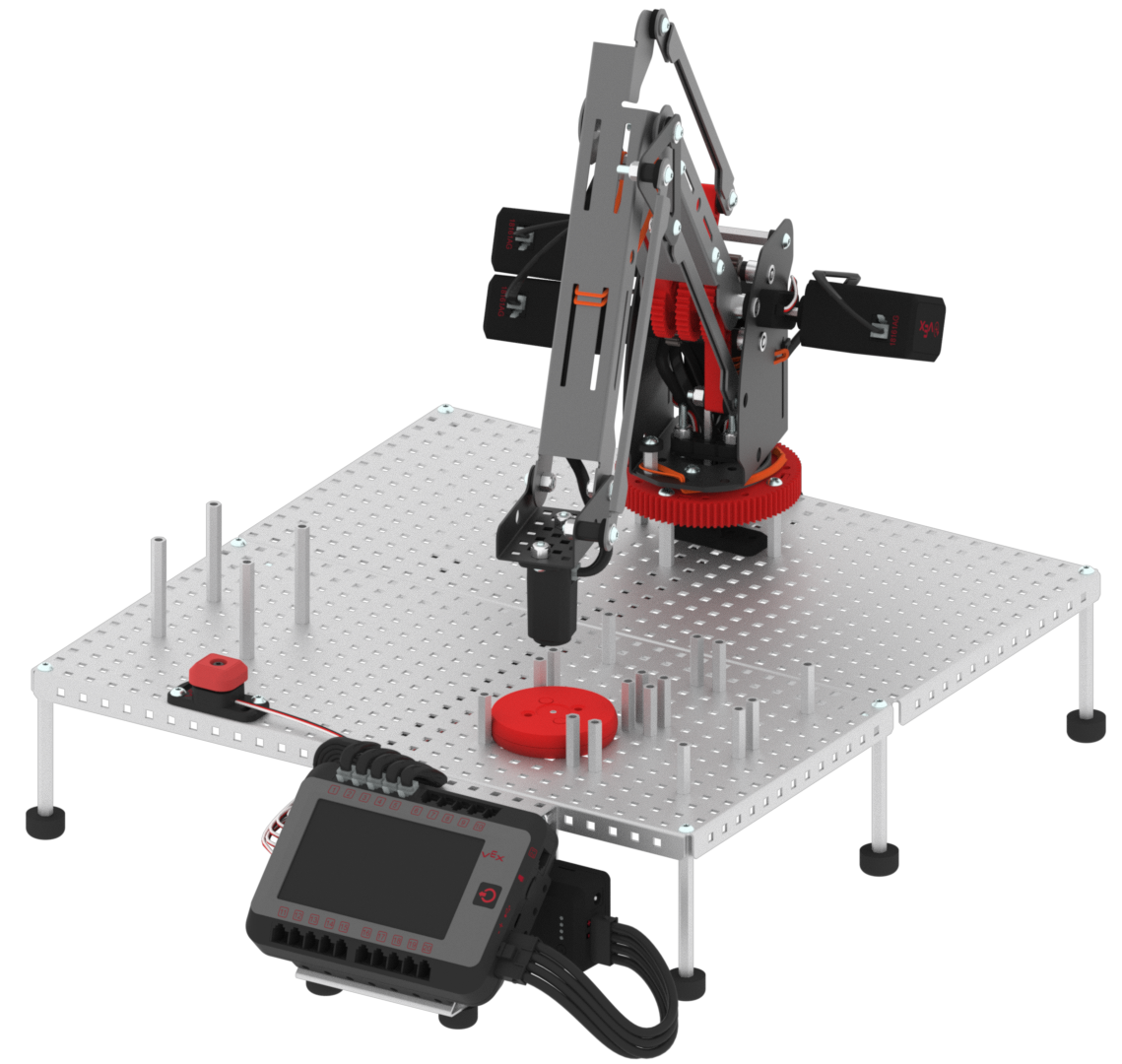
Download and run the project. The arm will move to the drop off location and sort the disk by dropping it into the standoffs.
If your arm did not sort the disk, notify your teacher.
Once you have finished coding the arm to sort the disk, stop the project.
