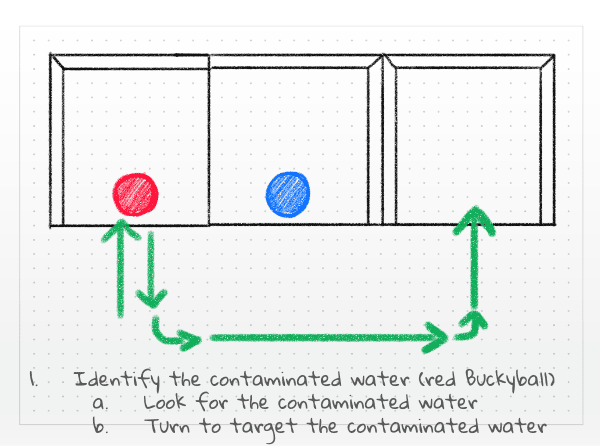
Prozessübersicht
Jede Phase der Clean Water Mission kann in einem dreiphasigen Prozess gelöst werden.
- Planung
- Pseudocodierung
- Bauen und Testen
Sehen Sie sich das Video unten an und lesen Sie die Zusammenfassung, um zu erfahren, wie Sie diesen Prozess verwenden, um eine Codierungsherausforderung wie die Clean Water Mission zu lösen. Sie können während der Challenge jederzeit auf diese Informationen zurückgreifen.
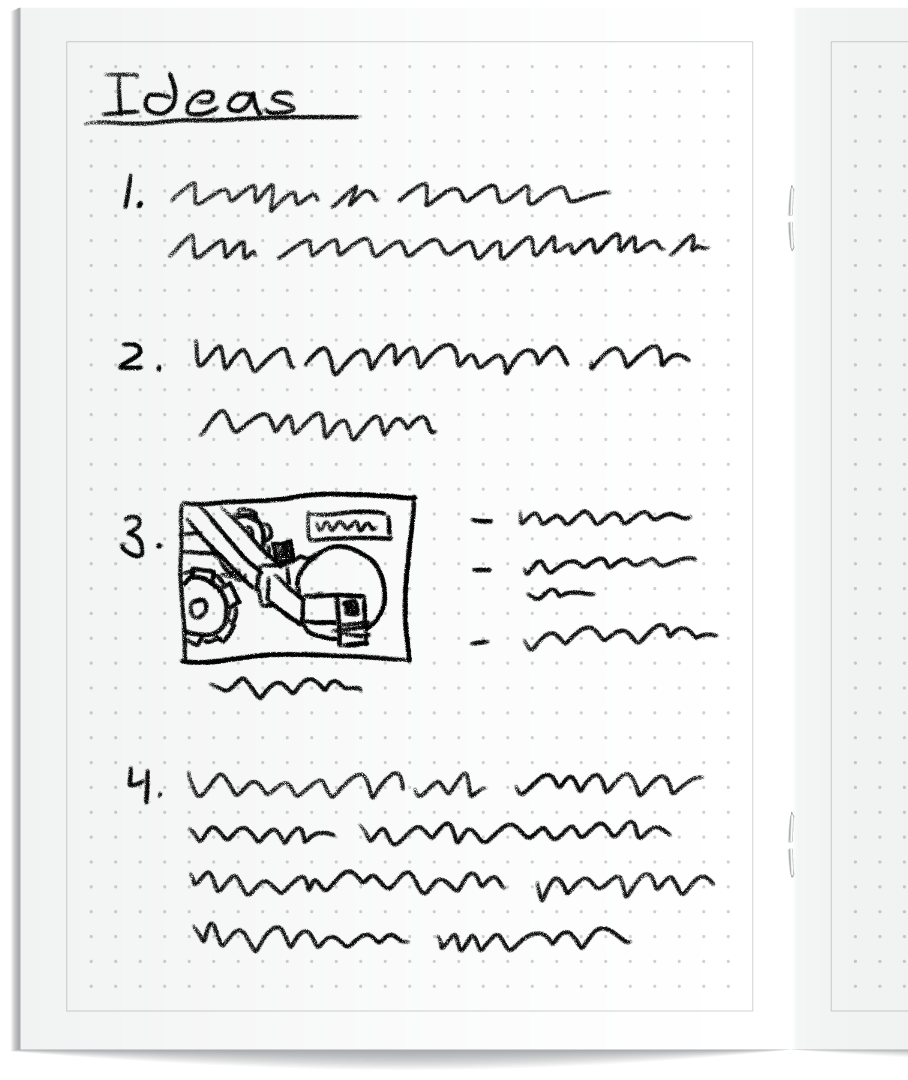
Phase 1: Planung
- Überprüfen Sie das Challenge-Dokument als Team. Stellen Sie sicher, dass jeder die Ziele und Anforderungen der Herausforderung vollständig versteht, bevor Sie Ideen brainstormen. Wenn Sie Fragen zur Herausforderung haben, fragen Sie andere Gruppen oder Ihren Lehrer.
- Arbeiten Sie mit Ihrem gesamten Team zusammen, um eine Liste mit mehreren gründlichen, innovativen Ideen für die Bewältigung der Herausforderung zu erstellen. Notieren Sie sie unbedingt in Ihrem technischen Notizbuch.
- Schränken Sie die Liste Ihres Teams auf die wichtigsten Ideen ein.
- Die Planung und das Brainstorming Ihres Teams werden dahingehend bewertet, wie gut Sie zusammenarbeiten, um eine umfassende Liste kreativer Lösungen zu erstellen.
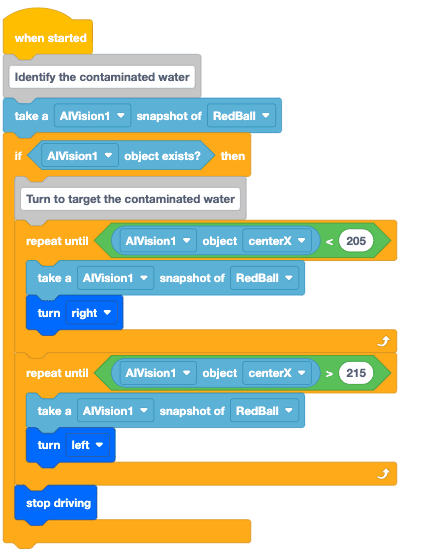
Phase 2: Pseudocodierung
- Beginnen Sie mit der Aufzeichnung der übergeordneten Schritte, die erforderlich sind, um die Herausforderung in einer für Menschen lesbaren Sprache zu lösen.
- Diese Schritte sollten zu den Kommentaren in Ihrem Codierungsprojekt werden.
- Fügen Sie die mit jedem Schritt verbundenen Datentypen hinzu, die vom KI-Visionssensor benötigt werden.
- Unterteilen Sie Ihre übergeordneten Schritte in die einzelnen Verhaltensweisen, die der Roboter ausführen muss, um die Herausforderung zu meistern.
- Ihre Pseudokodierung wird danach bewertet, wie klar sie geschrieben ist, wie gründlich sie ist und wie Sie die Daten des KI-Vision-Sensors verwenden, um die Herausforderung zu meistern.
Phase 3: Bauen und Testen
- Verwenden Sie Ihren Pseudocode, um jedes Verhalten zu erstellen und zu testen, das der Roboter ausführen muss, um die Herausforderung zu meistern.
- Testen Sie, wie Sie gehen! Versuchen Sie nicht, das gesamte Projekt auf einmal zu erstellen, bevor Sie es testen. Dadurch wird es einfacher, auftretende Probleme zu beheben.
- Wiederholen Sie Ihr Projekt häufig, um Ihre Genauigkeit zu verbessern.
- Verfeinern Sie Ihren Plan und Pseudocode nach Bedarf, um die höchstmögliche Genauigkeit zu erreichen.
- Die Codierung und Ausführung Ihres Teams wird nach Abschluss der Herausforderung und dem Einsatz des KI-Vision-Sensors bewertet.