ภาพรวมกระบวนการ
แต่ละขั้นตอนของภารกิจน้ำสะอาดสามารถแก้ไขได้โดยใช้กระบวนการสามเฟส
- การวางแผน
- Pseudocoding
- อาคารและการทดสอบ
ดูวิดีโอด้านล่างและอ่านบทสรุปเพื่อเรียนรู้เกี่ยวกับการใช้กระบวนการนี้เพื่อแก้ปัญหาการเข้ารหัสเช่นภารกิจน้ำสะอาด คุณสามารถกลับไปดูข้อมูลนี้ได้ตลอดเวลาในระหว่างการท้าทาย
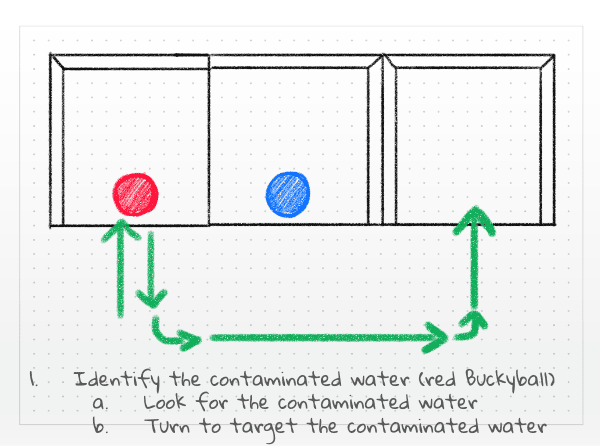
ระยะที่ 1: การวางแผน
- ตรวจสอบเอกสารการท้าทายเป็นทีม ตรวจสอบให้แน่ใจว่าทุกคนเข้าใจเป้าหมายและข้อกำหนดของความท้าทายอย่างถ่องแท้ก่อนที่จะระดมความคิด หากท่านมีคำถามเกี่ยวกับความท้าทายให้ถามกลุ่มอื่นหรือครูของท่าน
- ร่วมมือกับทีมงานทั้งหมดของคุณเพื่อจัดทำรายการไอเดียที่เป็นนวัตกรรมใหม่ๆอย่างละเอียดถี่ถ้วนเพื่อทำสิ่งที่ท้าทายให้สำเร็จ อย่าลืมบันทึกลงในสมุดบันทึกวิศวกรรมของคุณ
- จำกัดรายชื่อทีมของคุณให้อยู่ในไอเดียยอดนิยม
- การวางแผนและการระดมความคิดของทีมของคุณจะได้รับการประเมินว่าคุณทำงานร่วมกันได้ดีเพียงใดเพื่อสร้างรายการโซลูชันที่สร้างสรรค์ที่ครอบคลุม
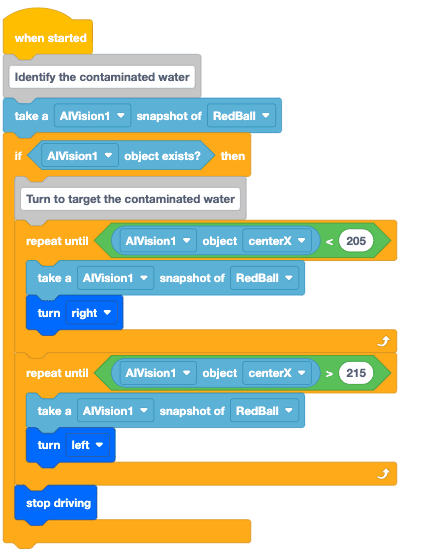
ระยะที่ 2: การสร้างรหัสเทียม
- เริ่มต้นด้วยการบันทึกขั้นตอนระดับสูงที่จำเป็นในการแก้ปัญหาความท้าทายในภาษาที่มนุษย์อ่านได้
- ขั้นตอนเหล่านี้จะกลายเป็นความคิดเห็นในโปรเจกต์การเขียนโค้ดของคุณ
- ระบุประเภทของข้อมูลที่จำเป็นจาก AI Vision Sensor ที่ใช้ในแต่ละขั้นตอน
- แบ่งขั้นตอนระดับสูงของคุณออกเป็นพฤติกรรมส่วนบุคคลที่หุ่นยนต์จะต้องทำเพื่อทำการท้าทายให้สำเร็จ
- การเข้ารหัสเทียมของคุณจะได้รับการประเมินว่าเขียนชัดเจนแค่ไหนละเอียดแค่ไหนและคุณใช้ข้อมูลจาก AI Vision Sensor เพื่อทำสิ่งที่ท้าทายได้อย่างไร
ระยะที่ 3: การสร้างและทดสอบ
- ใช้รหัสเทียมของคุณเพื่อสร้างและทดสอบพฤติกรรมแต่ละอย่างที่หุ่นยนต์ต้องทำเพื่อทำการท้าทายให้สำเร็จ
- ทดสอบตามที่คุณต้องการ! อย่าพยายามสร้างโครงการทั้งหมดในครั้งเดียวก่อนที่จะทดสอบ ซึ่งจะช่วยให้แก้ไขปัญหาที่เกิดขึ้นได้ง่ายขึ้น
- ทำโปรเจกต์ของคุณซ้ำๆบ่อยๆเพื่อปรับปรุงความถูกต้อง
- ปรับแต่งแผนและรหัสเทียมของคุณตามความจำเป็นเพื่อให้ได้ความแม่นยำสูงสุดเท่าที่จะเป็นไปได้
- การเข้ารหัสและการดำเนินการของทีมของคุณจะได้รับการประเมินเมื่อเสร็จสิ้นความท้าทายและการใช้ AI Vision Sensor