Process Overview
Each stage of the Clean Water Mission can be solved using a three-phase process.
- Planning
- Pseudocoding
- Building and Testing
Watch the video below and read the summary to learn about using this process to solve a coding challenge, like the Clean Water Mission. You can refer back to this information at any point during the challenge.
Phase 1: Planning
- Review the Challenge Document as a team. Ensure everyone fully understands the goals and requirements of the challenge before brainstorming ideas. If you have questions about the challenge, ask other groups or your teacher.
- Collaborate with your whole team to come up with a list of several thorough, innovative ideas for completing the challenge. Be sure to record them in your engineering notebook.
- Narrow your team's list down to the top ideas.
- Your team's planning and brainstorming will be evaluated on how well you collaborate to make a comprehensive list of creative solutions.
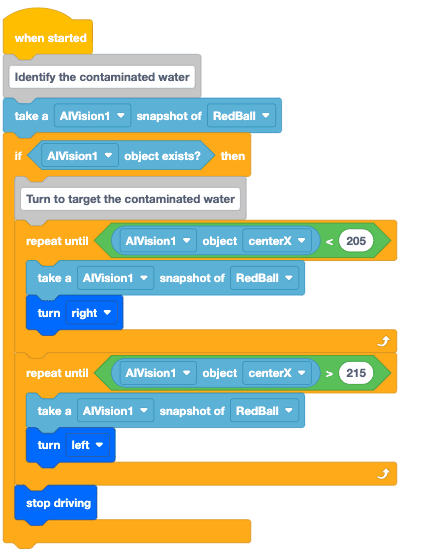
Phase 2: Pseudocoding
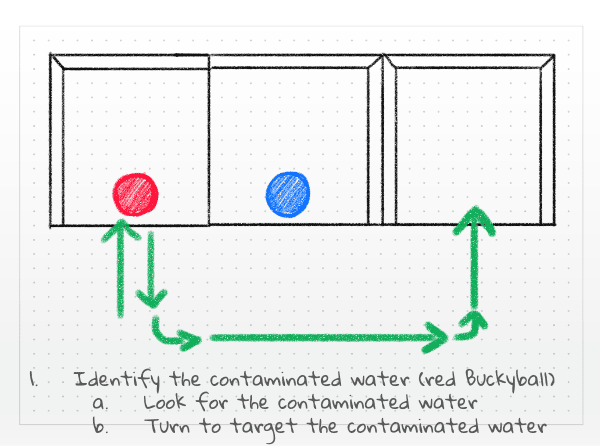
- Begin by recording the high-level steps needed to solve the challenge in human-readable language.
- These steps should become the comments in your coding project.
- Include the types of data needed from the AI Vision Sensor that go with each step.
- Break down your high-level steps into the individual behaviors the robot will need to perform to complete the challenge.
- Your pseudocoding will be evaluated on how clearly it is written, how thorough it is, and how you use data from the AI Vision Sensor to complete the challenge.
Phase 3: Building and Testing
- Use your pseudocode to build and test each behavior the robot needs to perform to complete the challenge.
- Test as you go! Do not try to build the entire project at once before testing. This will make it easier to troubleshoot issues that arise.
- Iterate on your project frequently to improve your accuracy.
- Refine your plan and pseudocode as needed to achieve the highest possible accuracy.
- Your team's coding and execution will be evaluated on the completion of the challenge and the use of the AI Vision Sensor.