
अभ्यास
पिछले अनुभाग में, आपने ड्राइवर नियंत्रण कार्यक्रम और अपने रोबोट को चलाने के लिए जॉयस्टिक कॉन्फ़िगरेशन का चयन करने के बारे में सीखा। अब आप जो कुछ भी सीखा है उसे विभिन्न ड्राइवर नियंत्रण विन्यासों के साथ प्रयोग करने के लिए लागू करेंगे, ताकि किसी बाधा को सबसे तेज गति से पार किया जा सके।
नीचे दिए गए वीडियो को देखें कि आपने जो सीखा है उसे आप बाधा के चारों ओर ड्राइव अभ्यास गतिविधि को पूरा करने के लिए कैसे लागू कर सकते हैं।
अब आपकी बारी है बाधा के चारों ओर ड्राइव अभ्यास गतिविधि को पूरा करने की!
यह एनीमेशन देखें कि आपके रोबोट को बाधा के चारों ओर ड्राइव अभ्यास गतिविधि को पूरा करने के लिए किस पथ का अनुसरण करना चाहिए।
इस गतिविधि को पूरा करने के तरीके के बारे में अधिक जानने के लिए इस दस्तावेज़ में दिए गए चरणों का पालन करें। Google / .docx / .pdf
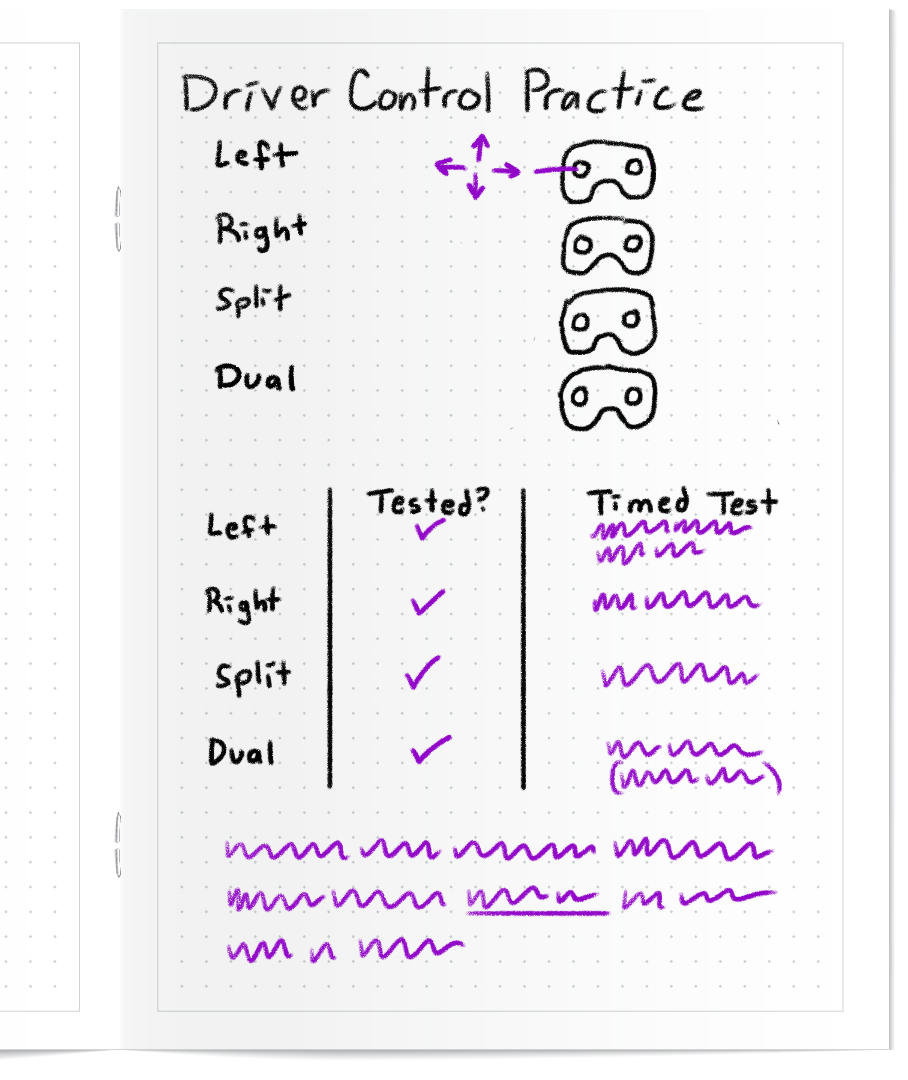
जैसे ही आप बाधा के चारों ओर ड्राइव अभ्यास गतिविधि पूरी करते हैं, अपने निष्कर्षों को अपनी इंजीनियरिंग नोटबुक में दर्ज करें। इन निष्कर्षों को रिकॉर्ड करते समय सोचें कि आप कौन सा ड्राइवर कॉन्फ़िगरेशन पसंद करते हैं और क्यों।
अपने परिणाम कैसे रिकॉर्ड करें, इसके उदाहरण के लिए इस चित्र को देखें।
अब जब आपने अभ्यास गतिविधि पूरी कर ली है और अपनी पसंदीदा संरचना चुन ली है, तो अब फिगर आठ चैलेंज के लिए अभ्यास करने का समय है।
चुनौती के लिए तैयार रहें
प्रतिस्पर्धा (अगले पृष्ठ पर) में, आप अपने रोबोट को दो बाधाओं के चारों ओर आठ के आकार में चलाएंगे, और सबसे तेज समय वाला चालक जीत जाएगा। चुनौती में प्रतिस्पर्धा करना सीखें, अपनी समझ की जांच करें, फिर चुनौती के लिए अभ्यास करें।
अपनी समझ की जाँच करें
चुनौती खेलना शुरू करने से पहले, सुनिश्चित करें कि आप अपनी इंजीनियरिंग नोटबुक में नीचे दिए गए दस्तावेज़ में दिए गए प्रश्नों के उत्तर देकर चुनौती के नियमों और सेटअप को समझते हैं।
अपनी समझ की जाँच करें प्रश्न Google / .docx / .pdf
प्रश्नों को पूरा करने के बाद चुनौती का अभ्यास करें।
चुनौती में भाग लेने के लिएअगला >चुनें।