
Learn
Before you can drive the TrainingBot in the Figure Eight Challenge, you first need to learn how to drive the TrainingBot using the Controller.
Driver Control Program
There is a program already built into the Brain that allows you to drive the TrainingBot using the Controller without having to write any code. View the animation below and follow along to run the Driver Control program on the Brain.
Controller Configurations
There are four different configurations of the Driver Control program on the Brain: Left, Right, Split, and Dual drive. Follow the steps in the animation below to learn what each of the four configurations are, and how to select them on the Brain.
View the animation to see how to select a Controller configuration for the Driver Control program on the Brain. The steps include:
- Press the 'Drive' icon to select the Drive program.
- Select the 'Controls' icon to view the configuration options.
- Select 'Left,' 'Dual', 'Split', or 'Right' to view each of the Controller configurations.
Each of the four driver control options allows you to control the BaseBot using the joysticks in different ways.
| Configuration | Description | Joystick Controls |
|---|---|---|
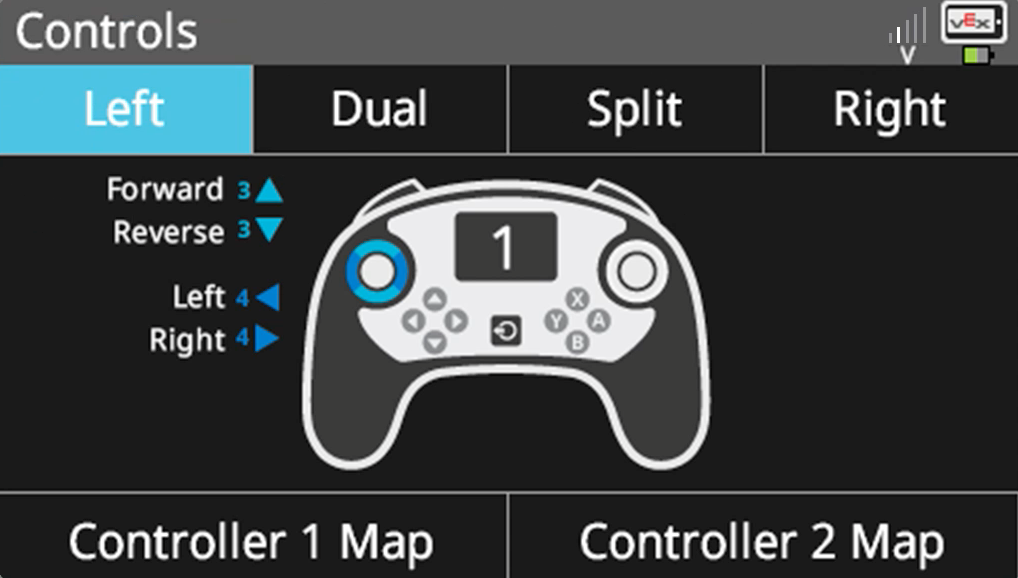 |
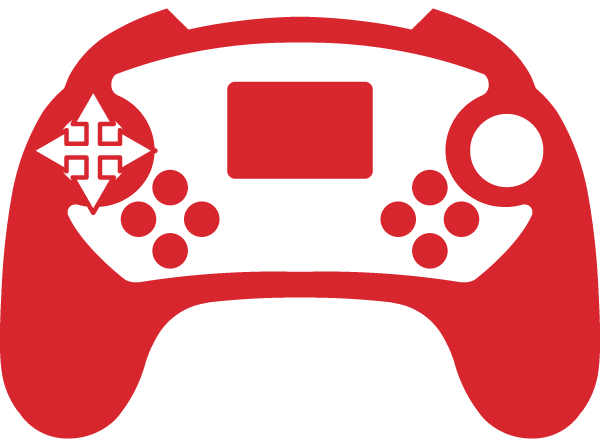
Left Drive the robot forward, reverse, left, and right all using the left joystick. |
 |
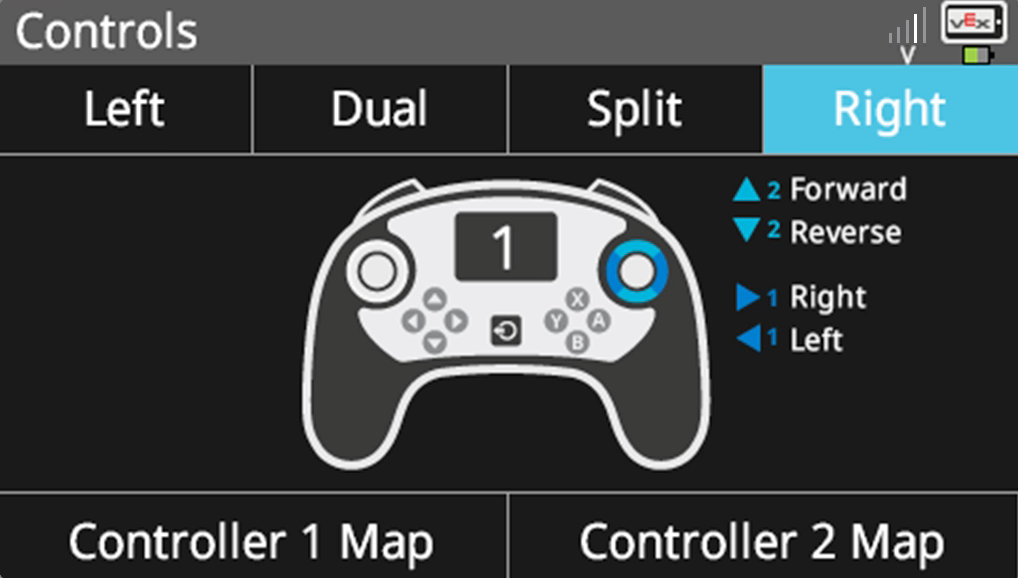 |
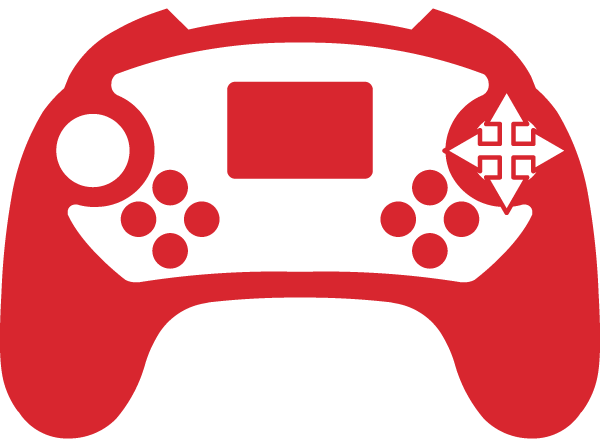
Right Drive the robot forward, reverse, left, and right all using the right joystick. |
 |
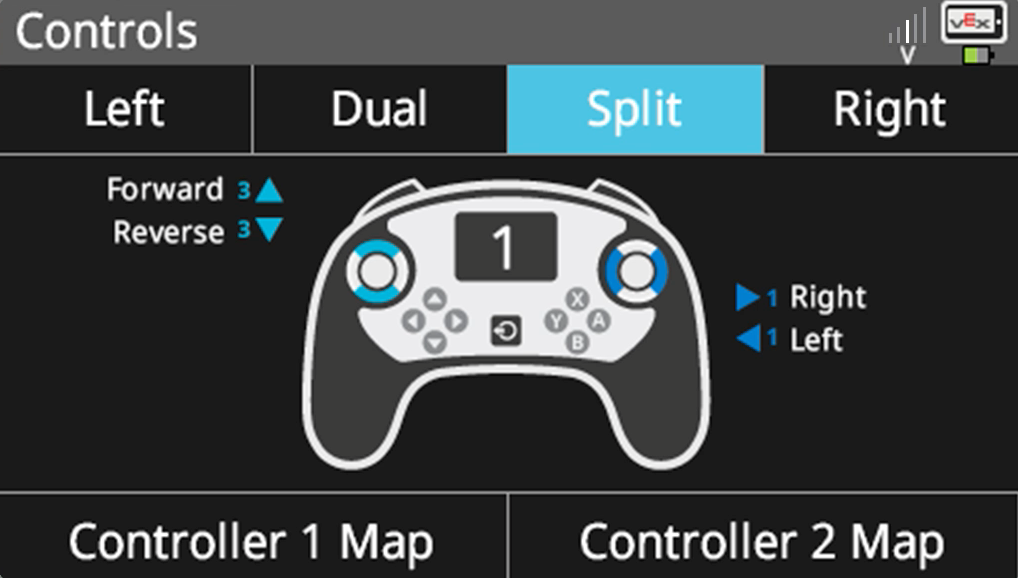 |
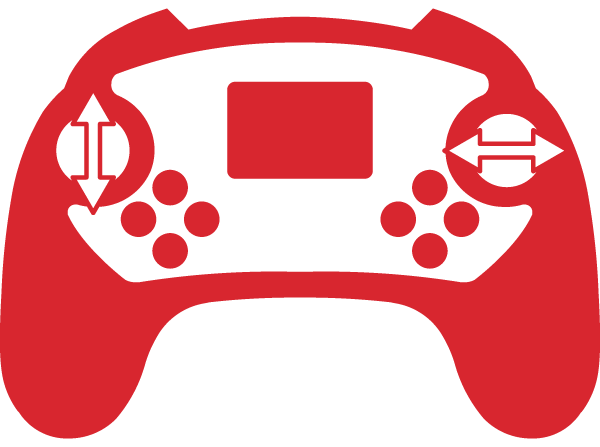
Split Drive the robot left and right using the left joystick, and forward and reverse using the right joystick. |
 |
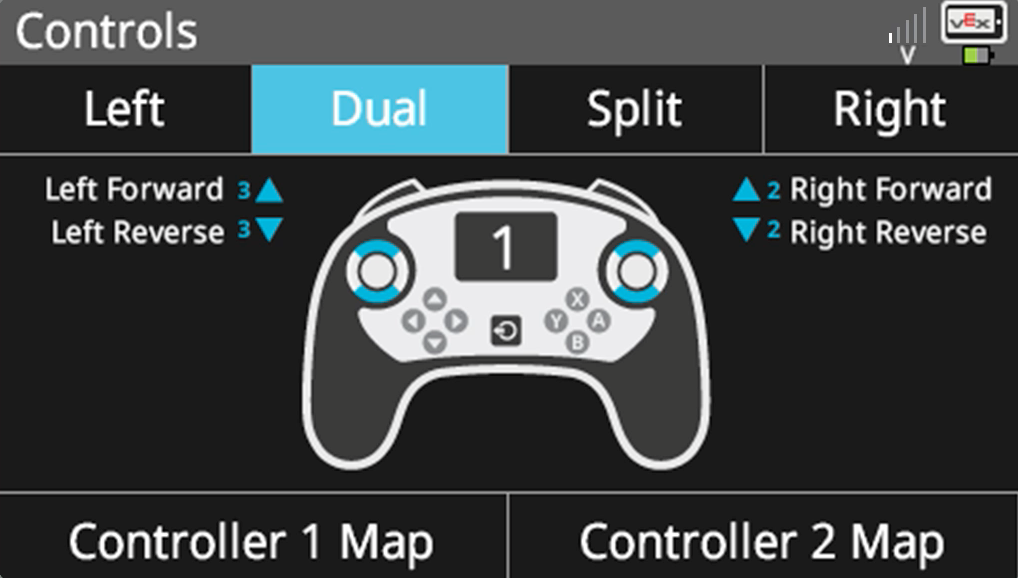 |
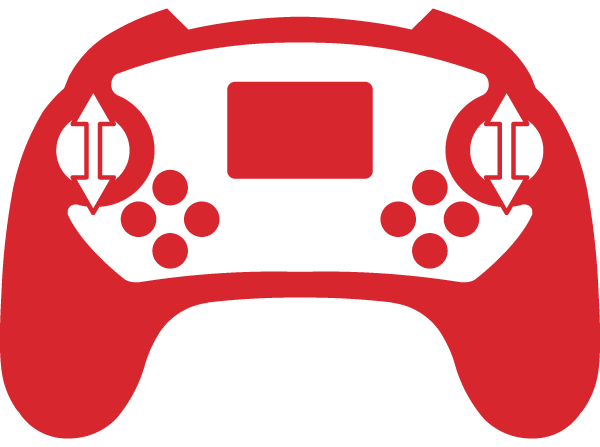
Dual Drive the left motor of the robot using the left joystick, and the right motor of the robot using the right joystick. |
 |
Check Your Understanding
Before moving on to the Practice section, ensure that you understand the concepts covered on this page by answering the questions in the document below in your engineering notebook.
Check Your Understanding questions Google / .docx / .pdf
Select Next > to practice using the driver control program with your robot.