Su e giù
6 Lezioni
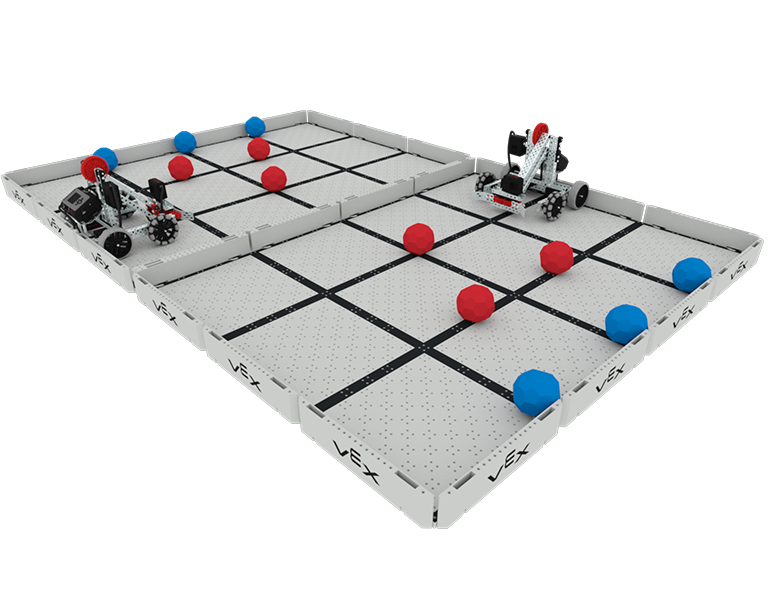
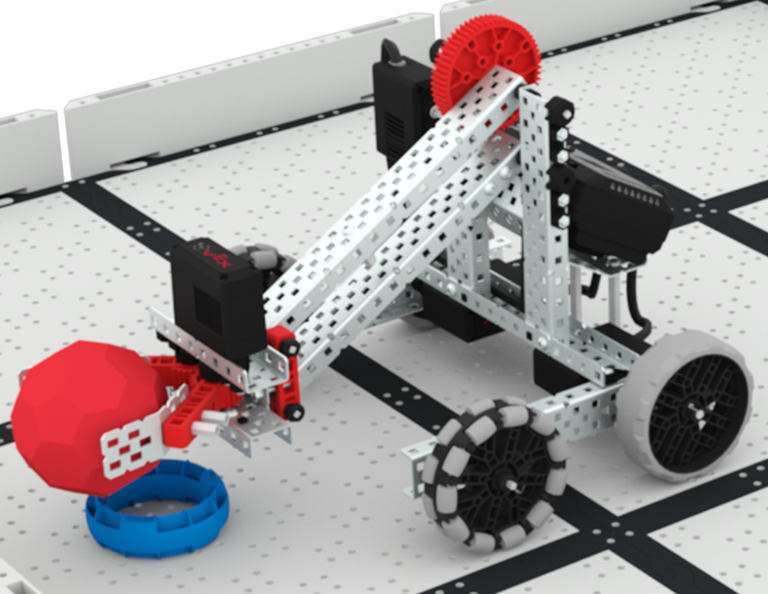
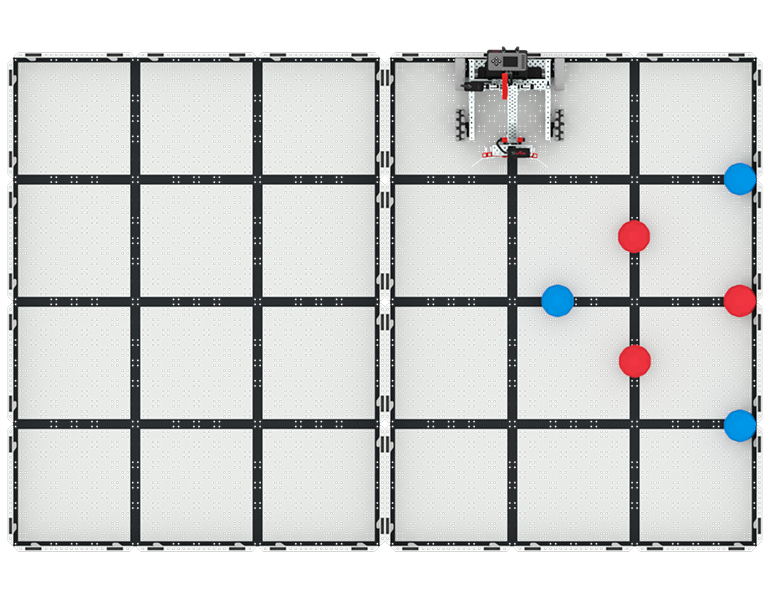
In questa unità esplorerai come progettare un Clawbot per raccogliere, raccogliere e spostare Buckyball da un lato all'altro del campo, nella competizione Up and Over!
Visita il Portale degli insegnanti per materiali di supporto e video per gli insegnanti sui contenuti e sulla facilitazione delle lezioni Up and Over.
Lezione 1: Introduzione
In questa lezione, verrai introdotto alla competizione Up and Over, imposterai la batteria e il controller, preparati a codificare e costruirai il Clawbot.
Lezione 2: Progettazione degli artigli
In questa lezione, imparerai cos'è un artiglio, come funziona un artiglio efficace e in che modo lo scouting può avvantaggiare i progetti e la strategia del tuo team. Quindi, applicherai ciò che hai imparato nella sfida Afferra e vai.
Lezione 3: Disegni del braccio
In questa lezione, imparerai a conoscere diversi elementi dei bracci robotici, incluso il loro funzionamento, e cosa rende efficace un design del braccio. Quindi, progetterai e costruirai un braccio per il tuo robot per impilare Buckyballs in anelli per la sfida Stacked Up.
Lezione 4: Gruppi Motori
In questa lezione, imparerai cosa sono i gruppi motori, come possono essere utili e come configurare i gruppi motori in VEXcode EXP per iterare sul tuo robot per completare la sfida Up and Over.
Lezione 5: Alza e supera la concorrenza
In questa lezione, applicherai quanto appreso dalle lezioni precedenti per competere nella competizione Up and Over!

Lezione 6: Conclusione
In questa lezione, rifletterai sull'unità e identificherai le connessioni tra ciò che hai fatto e una carriera STEM.
Calcio robotico
4 Lezioni
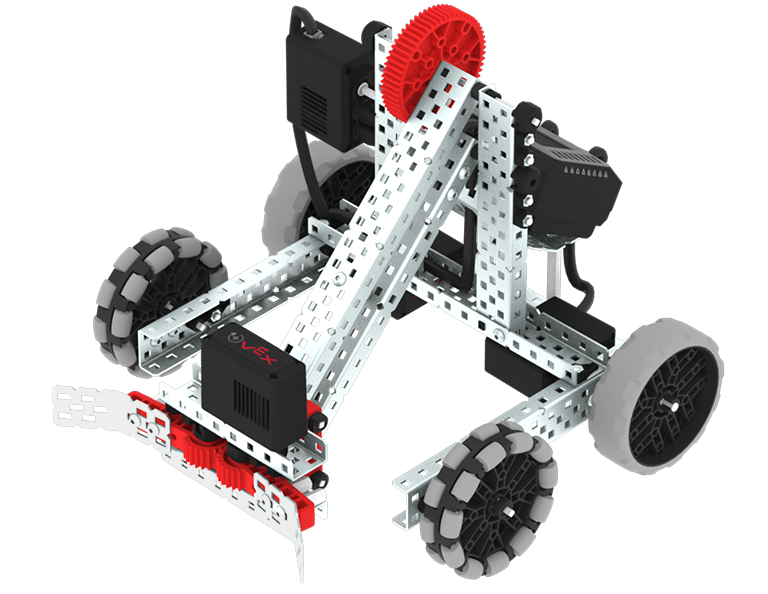
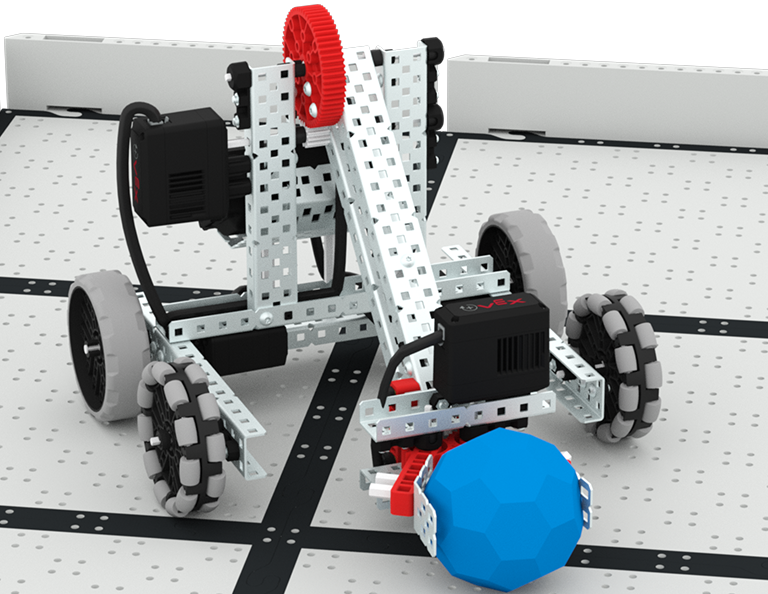
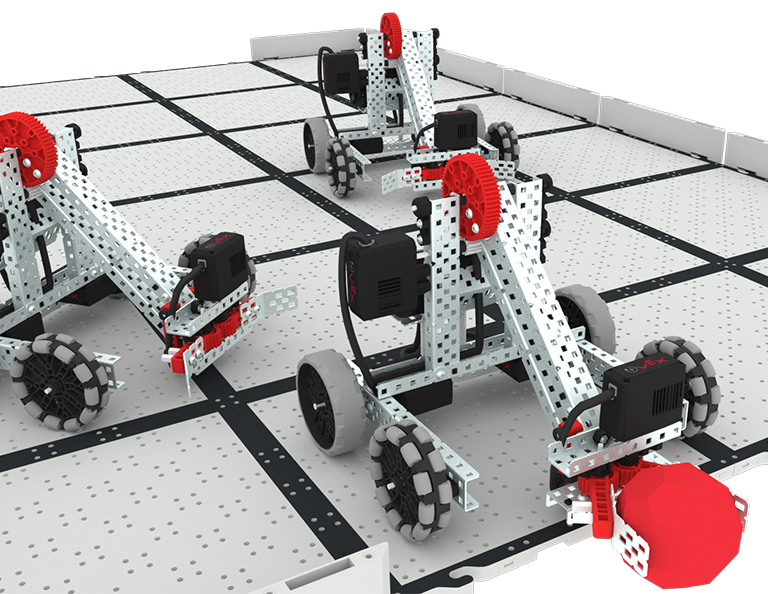
In questa unità esplorerai come creare un manipolatore sul tuo robot per afferrare, passare e segnare il maggior numero di goal come giocatore di calcio robot nella competizione Robot Soccer!
Visita il Portale degli insegnanti per materiali di supporto e video per gli insegnanti sui contenuti e sulla facilitazione delle lezioni di Robot Soccer.
Lezione 1: Introduzione
In questa lezione, costruirai il Clawbot, caricherai il controller e la batteria e ti preparerai a programmare.

Lezione 2: Manipolatori
In questa lezione, imparerai a conoscere i manipolatori passivi e attivi e il design dell'aspirazione, al fine di iterare sul design del tuo robot e competere in una sfida One-on-One Robot Soccer!
Lezione 3: Robot Soccer Competition
In questa lezione, applicherai quanto appreso dalla lezione precedente per competere nella competizione Robot Soccer!
Lezione 4: Conclusione
In questa lezione, rifletterai sull'unità e identificherai le connessioni tra ciò che hai fatto e una carriera STEM connessa.

Su e giù
6 Lezioni
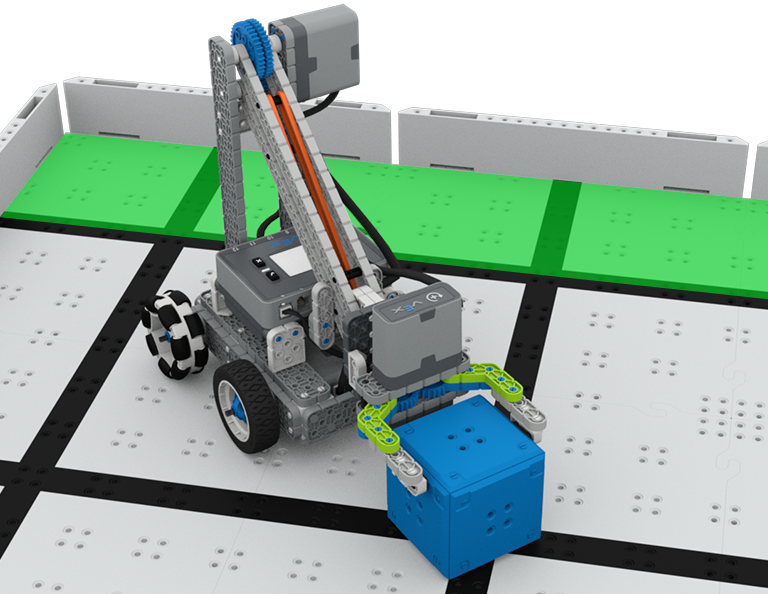
In questa unità esplorerai come progettare un Clawbot per raccogliere, sollevare e spostare i cubi da un lato all'altro del campo, nella competizione Up and Over!
Visita il Portale degli insegnanti per materiali di supporto e video per gli insegnanti sui contenuti e sulla facilitazione delle lezioni Up and Over.

Lezione 1: Introduzione
In questa lezione, verrai introdotto alla competizione Up and Over, imposterai la batteria e il controller, preparati a codificare e costruirai il Clawbot.
Lezione 2: Progettazione degli artigli
In questa lezione, imparerai cos'è un artiglio, come funziona un artiglio efficace e in che modo lo scouting può avvantaggiare i progetti e la strategia del tuo team. Quindi, applicherai ciò che hai imparato nella sfida Afferra e vai.
Lezione 3: Disegni del braccio
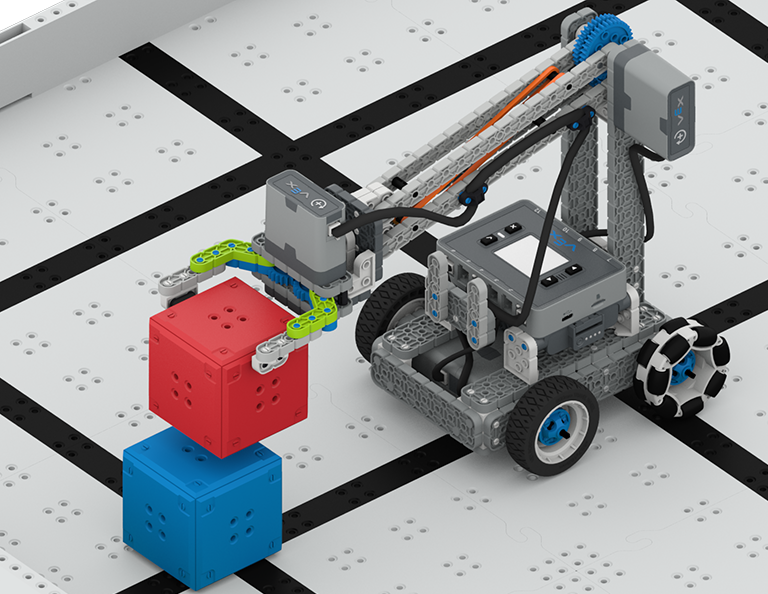
In questa lezione, imparerai i diversi elementi dei bracci robotici, come funzionano e cosa rende un braccio efficace, al fine di impilare il maggior numero possibile di cubi in un minuto nella sfida Stacked Up.
Lezione 4: Gruppi Motori
In questa lezione, imparerai cosa sono i gruppi motori, come possono essere utili e come configurare i gruppi motori in VEXcode IQ per iterare sul tuo robot per completare la sfida Up and Over.
Lezione 5: Alza e supera la concorrenza
In questa lezione, applicherai quanto appreso dalle lezioni precedenti per competere nella competizione Up and Over!

Lezione 6: Conclusione
In questa lezione, rifletterai sull'unità e identificherai le connessioni tra ciò che hai fatto e una carriera STEM.
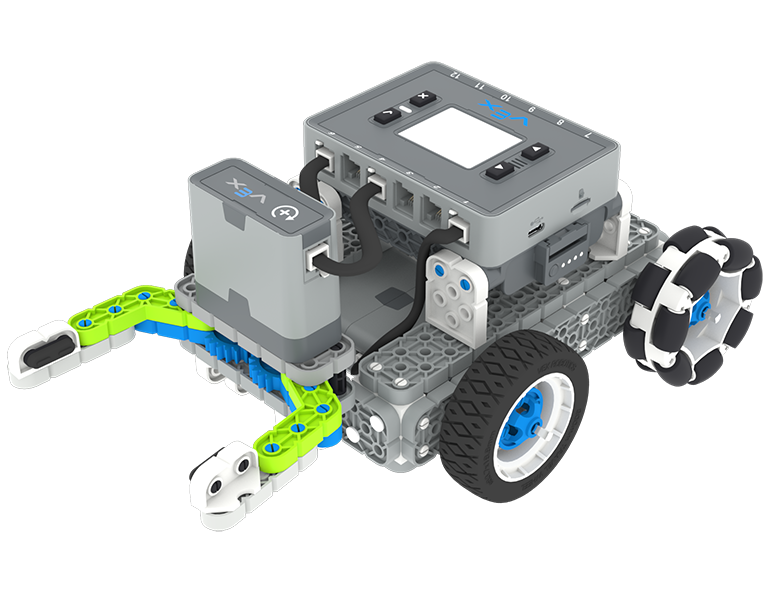
Calcio robotico
4 Lezioni
In questa unità esplorerai come creare un manipolatore sul tuo robot per afferrare, passare e segnare il maggior numero di goal come giocatore di calcio robot nella competizione Robot Soccer!
Visita il Portale degli insegnanti per materiali di supporto e video per gli insegnanti sui contenuti e sulla facilitazione delle lezioni di Robot Soccer.
Lezione 1: Introduzione
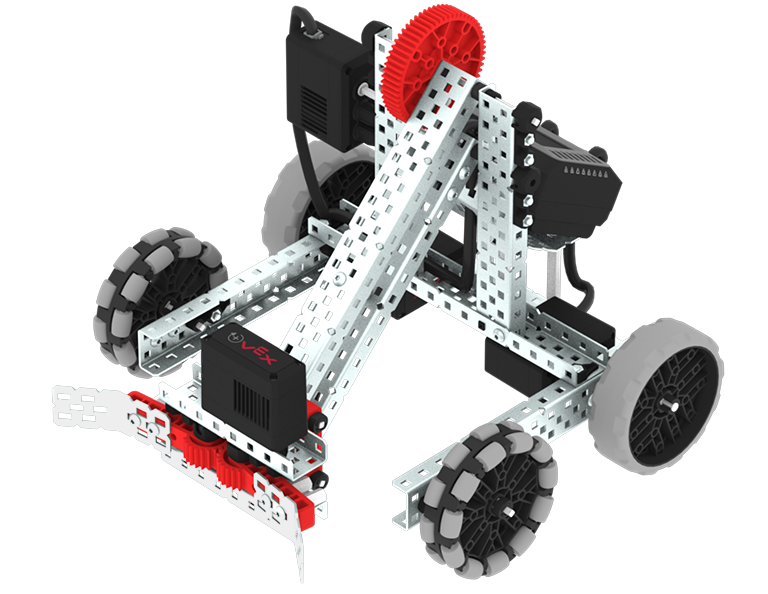
In questa lezione, costruirai il Simple Clawbot, caricherai il controller e la batteria e ti preparerai a programmare.
Lezione 2: Manipolatori
In questa lezione imparerai i manipolatori passivi e attivi e la progettazione dell'aspirazione, per poter ripetere la progettazione del tuo robot e competere in una sfida di calcio robotico uno contro uno!
Lezione 3: Robot Soccer Competition
In questa lezione, applicherai quanto appreso dalla lezione precedente per competere nella competizione Robot Soccer!
Lezione 4: Conclusione
In questa lezione, rifletterai sull'unità e identificherai le connessioni tra ciò che hai fatto e una carriera STEM connessa.

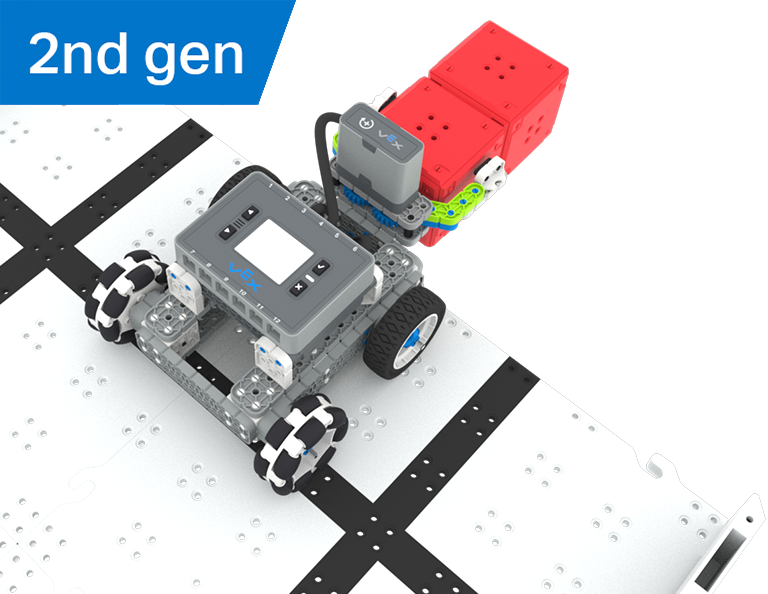
Collezionista di cubi
6 Lezioni
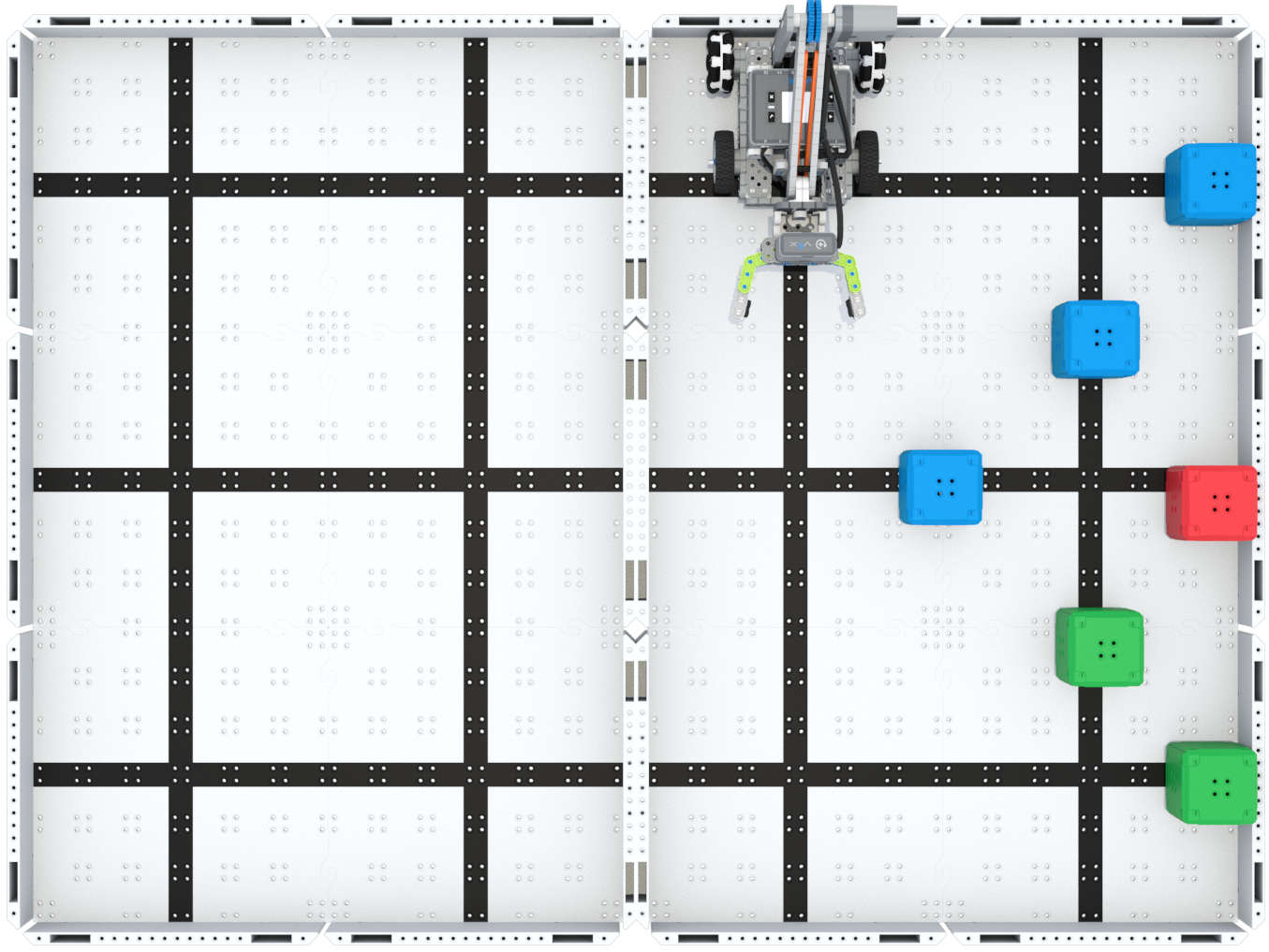
In questa unità esplorerai la differenza tra il controllo del conducente e le sfide autonome, mentre impari a guidare il Clawbot e a codificarlo per ordinare e impilare i cubi nella competizione Cube Collector!
Visita il Portale degli insegnanti per materiali di supporto e video per gli insegnanti sui contenuti e sulla facilitazione delle lezioni di Cube Collector.
Lezione 1: Introduzione
In questa lezione, verrai introdotto alla competizione Cube Collector, costruirai il Clawbot e ti preparerai a programmare.

Lezione 2: Controllo del conducente
In questa lezione, imparerai a utilizzare il programma Driver Control su IQ Brain in modo da poter guidare il Clawbot per impilare e segnare cubi sul campo e partecipare alla Speed Stack Challenge.

Lezione 3: Codifica dei movimenti autonomi
In questa lezione, imparerai a codificare il tuo robot per movimenti autonomi, incluso come pianificare il percorso del tuo robot. Quindi, creerai un progetto VEXcode IQ per assegnare un punteggio e impilare i cubi nella sfida autonoma Coding for Cubes.

Lezione 4: Utilizzo di più programmi (autonomo e autista partner)
In questa lezione, imparerai a personalizzare i controlli del conducente e come utilizzare il controller e VEXcode IQ per ottimizzare la tua strategia di guida per competere in una sfida con il controllo del conducente e le corse autonome.

Lezione 5: Concorso per collezionisti di cubi
In questa lezione, applicherai quanto appreso dalle lezioni precedenti per competere nella competizione Cube Collector!

Lezione 6: Conclusione
In questa lezione, rifletterai sull'unità e identificherai le connessioni tra ciò che hai fatto e una carriera STEM correlata.

Il distruttore del castello
6 Lezioni
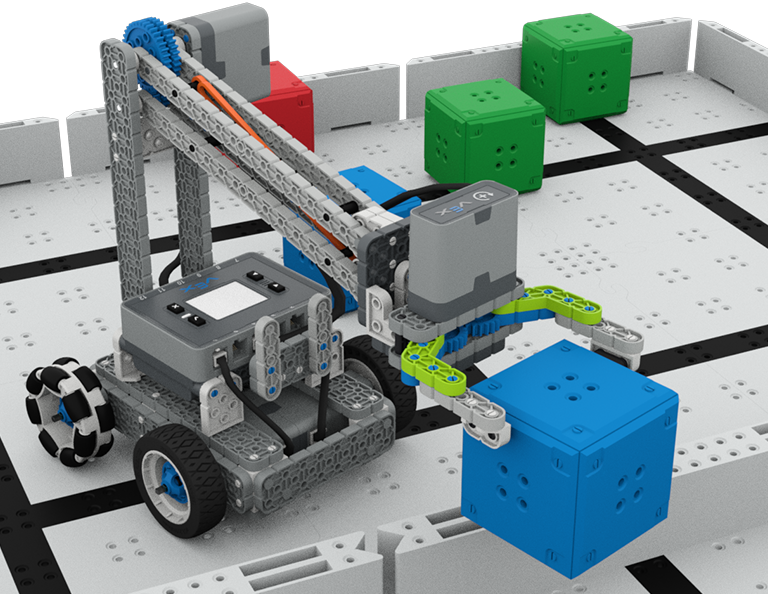
In questa unità esplorerai come utilizzare i sensori ottici e di distanza per cercare, schiantare e liberare "castelli" di cubi per ottenere punti nella competizione Castle Crasher!
Visita il Portale degli insegnanti per materiali di supporto e video per gli insegnanti sui contenuti e sulla facilitazione delle lezioni di Castle Crasher.

Lezione 1: Introduzione
In questa lezione, ti verrà presentata la competizione Castle Crasher, costruirai il BaseBot e ti preparerai a programmare.

Lezione 2: Castle Crasher senza sensori
In questa lezione, imparerai a calcolare gli angoli e a cambiare la velocità del tuo robot in modo da poter competere nella sfida Tower Over.

Lezione 3: Castle Crasher + sensore di distanza
In questa lezione imparerai cos'è il sensore di distanza e come può essere utilizzato sul tuo robot. Imparerai anche a conoscere il blocco [Wait until] e come può essere utilizzato in un progetto VEXcode IQ. Quindi applicherai ciò che hai imparato per competere nella Cube Crasher Challenge!

Lezione 4: Creazione di algoritmi
In questa lezione, imparerai a conoscere il sensore ottico e come creare un algoritmo che utilizza il feedback del sensore. Quindi codificherai il tuo robot per trovare autonomamente i cubi e spingerli fuori dal campo nella Sfida Sweep the Field.

Lezione 5: Competizione Castle Crasher
In questa lezione applicherai quanto appreso dalle lezioni precedenti per competere in una competizione Castle Crasher!
Lezione 6: Conclusione
In questa lezione, rifletterai sull'unità e identificherai le connessioni tra ciò che hai fatto e una carriera STEM.
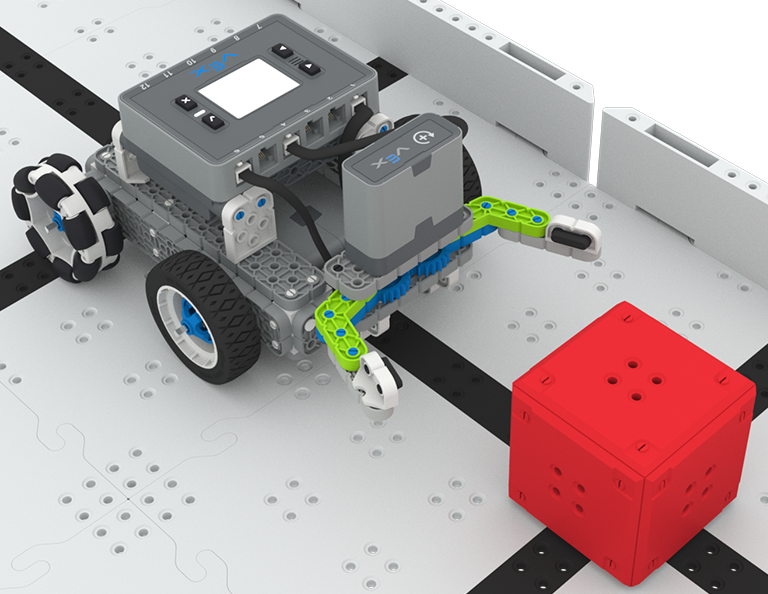
Caccia al tesoro
5 Lezioni
In questa unità costruirai e codificherai il Simple Clawbot con il sensore ottico per riconoscere e raccogliere cubi rossi per competere nella competizione Caccia al tesoro!
Visita il Portale degli insegnanti per materiali di supporto e video per gli insegnanti sui contenuti e sulla facilitazione delle lezioni di caccia al tesoro.
Lezione 1: Introduzione
Ti verrà presentato il concorso Caccia al Tesoro, costruirai il Simple Clawbot e ti preparerai a programmare.
Lezione 2: Artiglio senza sensore
In questa lezione, imparerai a utilizzare i blocchi Drivetrain e Motion in VEXcode IQ per codificare il tuo Clawbot semplice per raccogliere e spostare i cubi nella sfida Clawbot Collector.
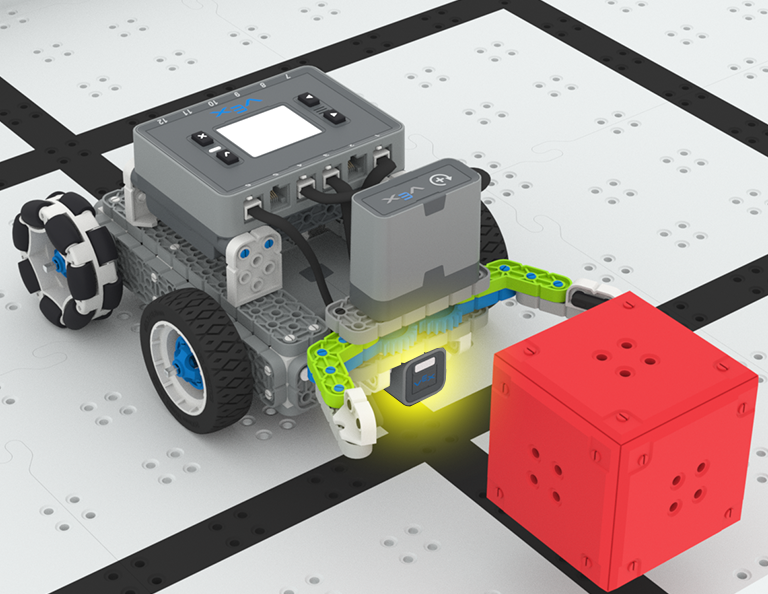
Lezione 3: Artiglio con sensore
In questa lezione, imparerai a codificare il sensore ottico per rilevare, raccogliere e spostare un cubo rosso nella sfida Treasure Mover!
Lezione 4: Gara di caccia al tesoro
In questa lezione applicherai quanto appreso dalle lezioni precedenti per competere in una Caccia al Tesoro!
Lezione 5: Conclusione
In questa lezione, rifletterai sull'unità e identificherai le connessioni tra ciò che hai fatto e una carriera STEM.