STEM LabsVEX V5

Laboratori STEM
13 Laboratoires
Raccolta di laboratori STEM V5








STEM LabsVEX GO
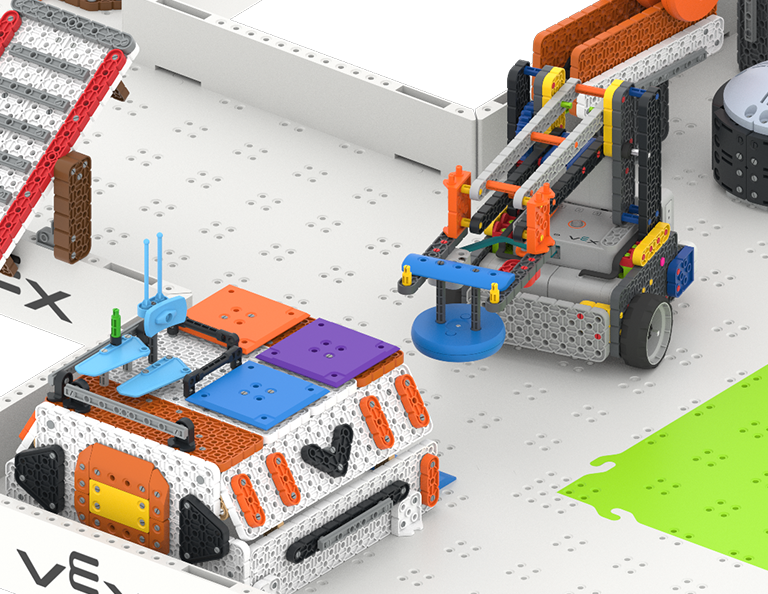
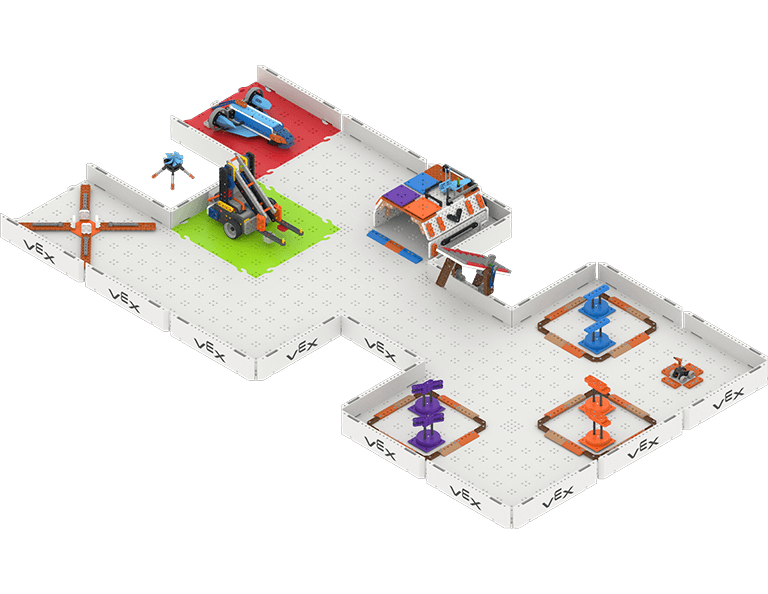
Spedizione matematica su Marte
5 Laboratoires
In questa competizione VEX GO, gli studenti dell'unità laboratorio STEM guideranno un robot eroe per raccogliere campioni, salvare un rover, sollevare una nave spaziale e altro ancora nella competizione Mars Math Expedition!
Laboratorio 1
Collezione Crater
Guida il tuo robot per raccogliere campioni e liberare un rover da un cratere nella Competizione Collezione Cratere!
Come posso rimuovere campioni dai crateri nella Mars Math Expedition?
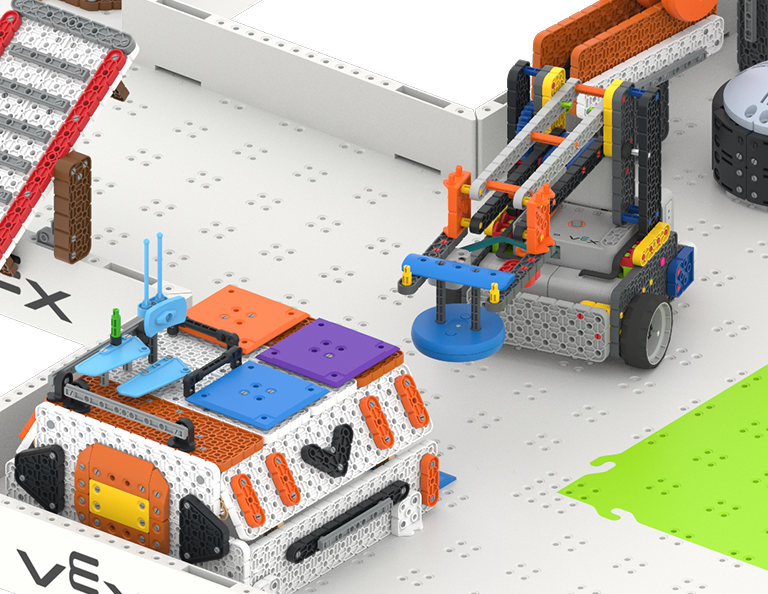
Costruire: Concorso Advanced Hero Robot 2.0
Utilizza la fase 1 del campo di gara GO della Mars Math Expedition
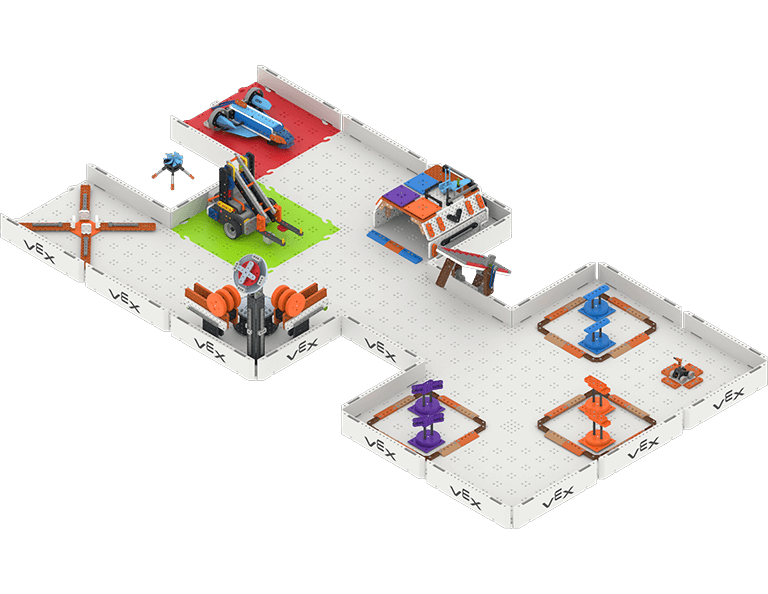
Laboratorio 2
Solleva sul laboratorio
Guida il tuo robot per raccogliere e posizionare i campioni sul Laboratorio nel Sollevamento fino alla Competizione di Laboratorio!
Come posso lavorare con il mio team per spostare i campioni nel laboratorio durante la competizione?
Costruire: Concorso Advanced Hero Robot 2.0
Utilizza la fase 2 del campo di gara GO della Mars Math Expedition
Laboratorio 3
Decollo!
Guida il tuo robot per sollevare la navicella spaziale e liberare il campo di atterraggio per l'elicottero durante il decollo! Concorrenza.
Come posso lavorare con la mia squadra per competere nel Blast Off! Concorrenza?
Costruire: Concorso Advanced Hero Robot 2.0
Utilizza la fase 3 del campo di gara GO della Mars Math Expedition
Laboratorio 4
Fuel Cell Frenzy
Rimuovi le celle a combustibile dalle loro culle e portale in vari luoghi sul campo usando il tuo robot eroe della competizione VEX GO nella competizione Fuel Cell Frenzy.
Come faccio a lavorare con il mio team per spostare le celle a combustibile in una competizione?
Costruire: Concorso Advanced Hero Robot 2.0
Utilizza la fase 4 del campo di gara GO della Mars Math Expedition
Laboratorio 5
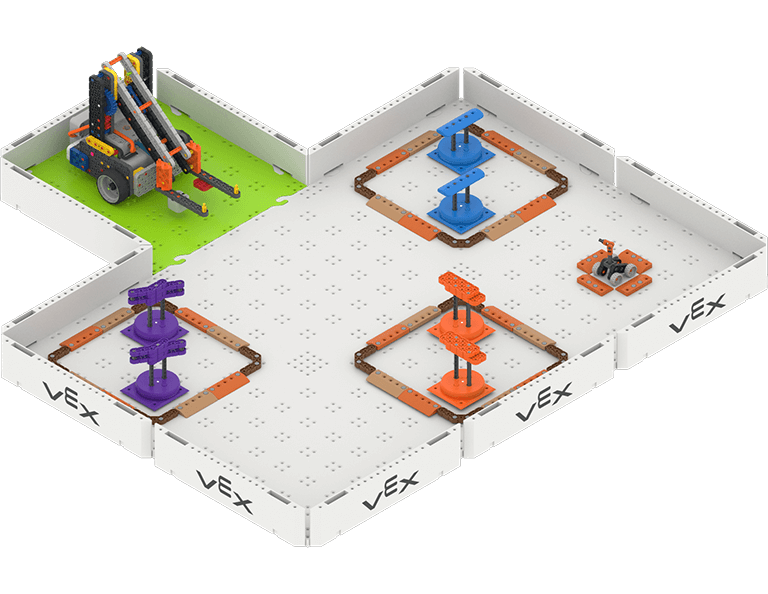
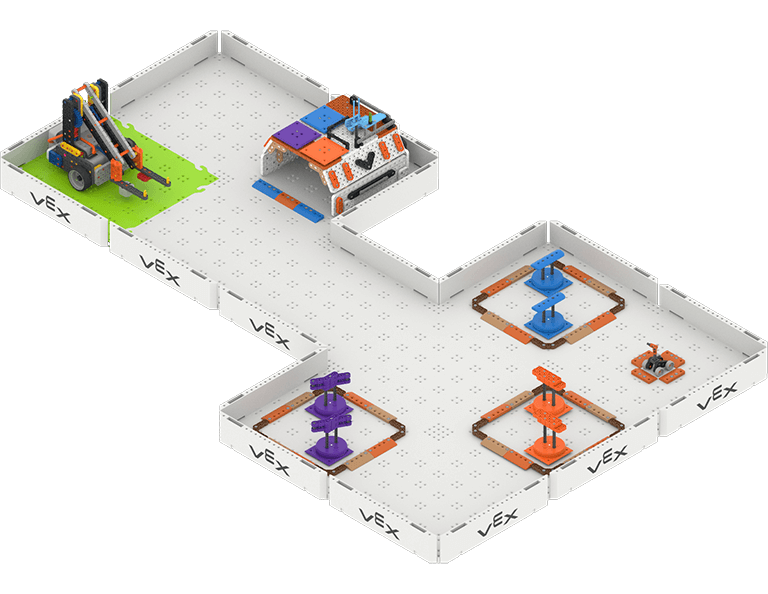
Competizione Mars Math Expedition
Prendi tutte le abilità che hai imparato nei precedenti laboratori e combinali per formare una strategia di gioco vincente nella Mars Math Expedition!
Come posso lavorare con il mio team per ottenere il maggior numero di punti in una competizione?
Costruire: Concorso Advanced Hero Robot 2.0
Utilizza l'intero campo di gara GO della Mars Math Expedition
STEM LabsVEX 123

Passare dal Touch al Coder
2 Laboratoires
Usa ciò che sai sulla codifica con i pulsanti Touch per imparare a programmare il Robot 123 utilizzando le carte Coder e Coder.


STEM LabsVEX 123
Trova l'insetto
2 Laboratoires
I bug nel nostro codice ci aiutano a imparare! Esercitati a utilizzare un processo di debug per identificare, trovare e correggere i bug nei progetti in modo che il robot 123 possa muoversi nel modo desiderato.
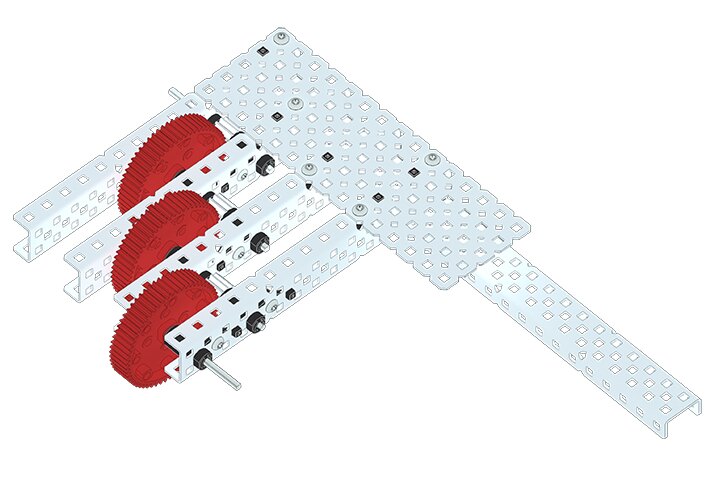
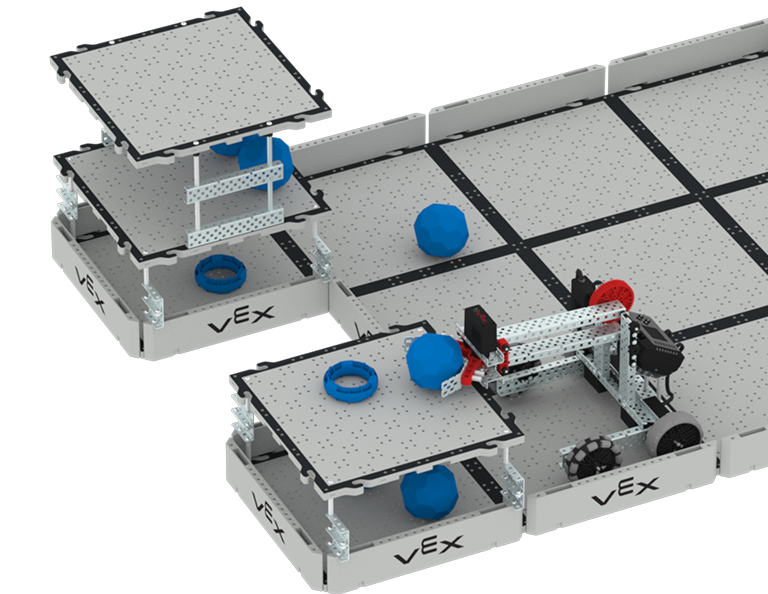
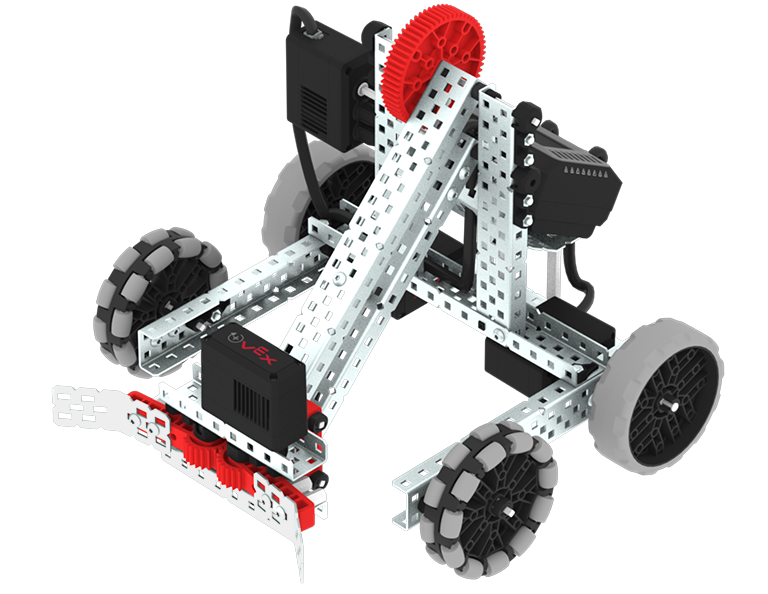
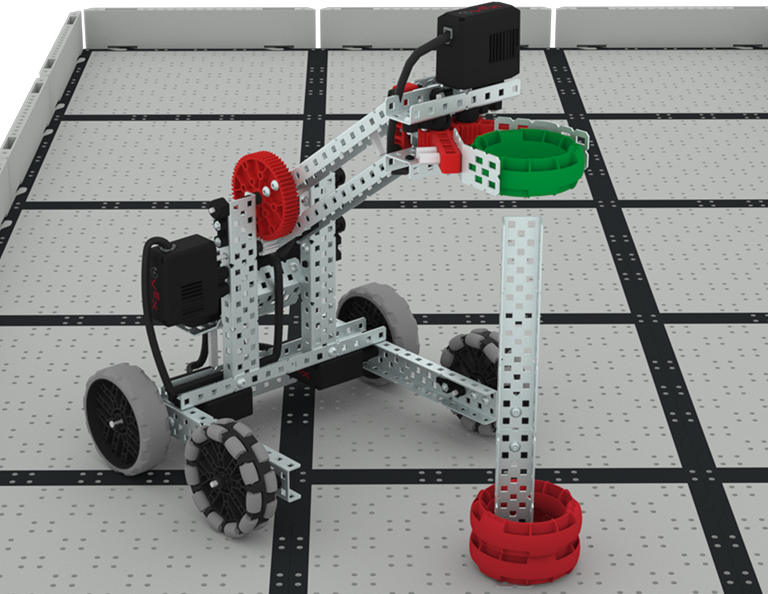
Posizionatore di piattaforma
6 Lezioni
In questa unità esplorerai i modi per utilizzare i manipolatori sul tuo Clawbot, inclusi gli ascensori, per spostare Buckyball e anelli su piattaforme di diversi livelli. Utilizzerai questa conoscenza per collaborare con un altro team per creare una strategia che combini la progettazione del robot e le abilità del conducente per competere nella competizione Platform Placer!
Visita il Portale degli insegnanti per materiali di supporto e video per gli insegnanti sui contenuti e sulla facilitazione delle lezioni di Platform Placer.
Lezione 1: Introduzione
In questa lezione, ti verrà presentata la Platform Placer Competition, costruirai il Clawbot e ti preparerai a programmare.
Lezione 2: Manipolazione di vari oggetti
In questa lezione, imparerai a conoscere i manipolatori e come progettare un manipolatore efficace per svolgere un compito, in modo da poter guidare il Clawbot a segnare anelli e buckyball su diverse piattaforme. Quindi parteciperai alla sfida Push and Place.
Lezione 3: Progettare ascensori
In questa lezione, imparerai a progettare ascensori, in modo da poter segnare oggetti di gioco sulla piattaforma alta e partecipare alla sfida Lift and Score.
Lezione 4: Sviluppare una strategia
In questa lezione, imparerai la strategia di gioco e come organizzare lo sviluppo della tua strategia con il tuo team, in modo da poter creare una strategia vincente per competere nella Shared Strategy Challenge.
Lezione 5: Concorso Platform Placer
In questa lezione, applicherai quanto appreso dalle lezioni precedenti per competere nella competizione Platform Placer!

Lezione 6: Conclusione
In questa lezione, rifletterai sull'unità e identificherai le connessioni tra ciò che hai fatto e una carriera STEM connessa.
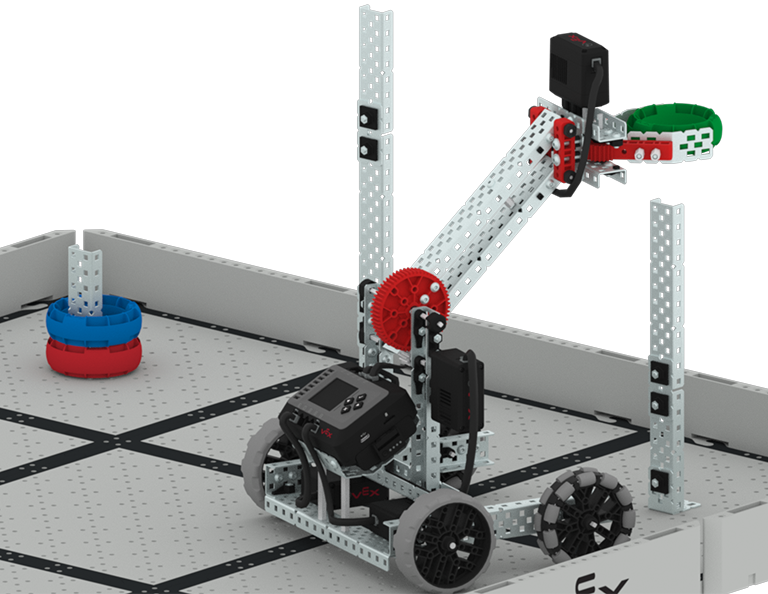
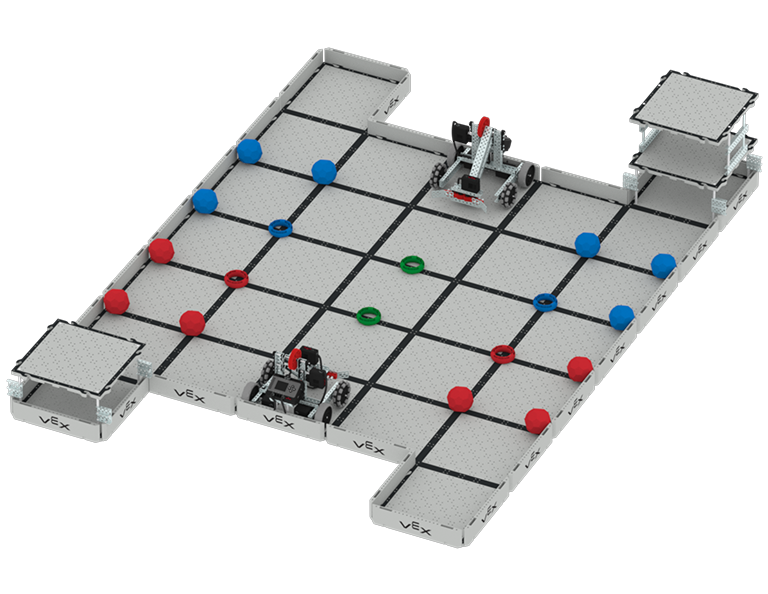
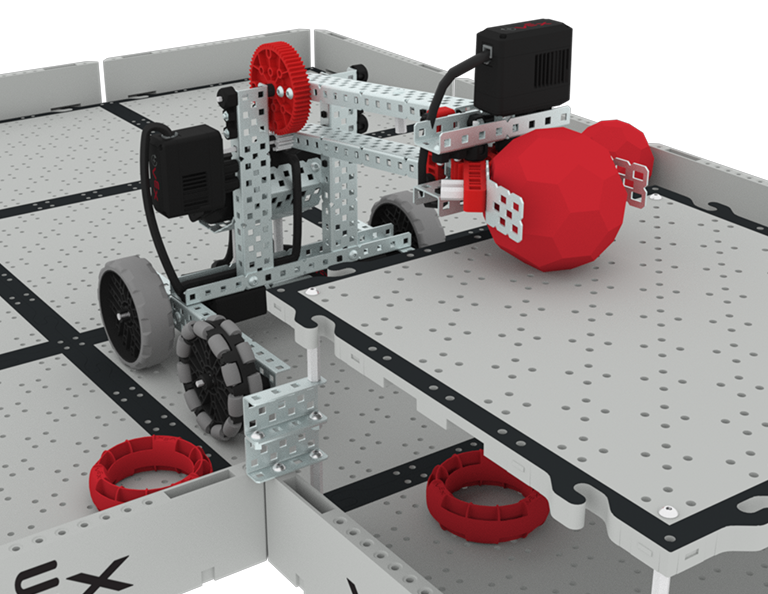
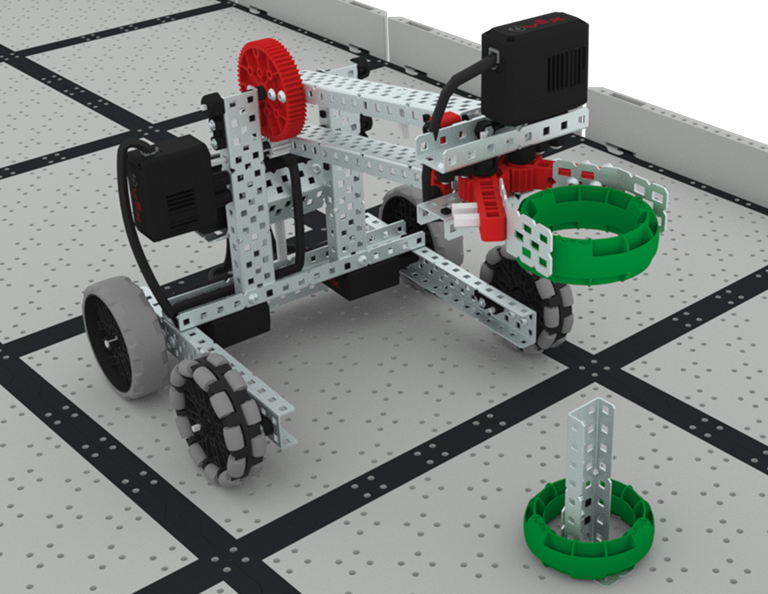
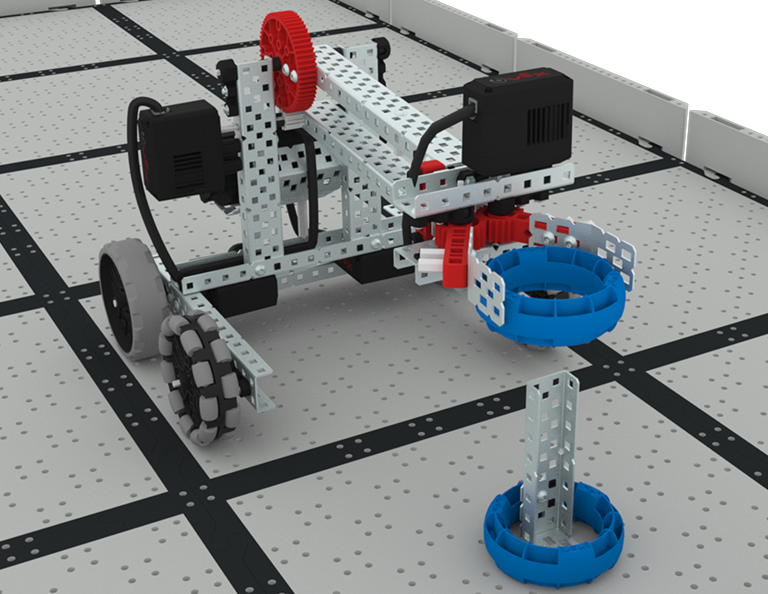
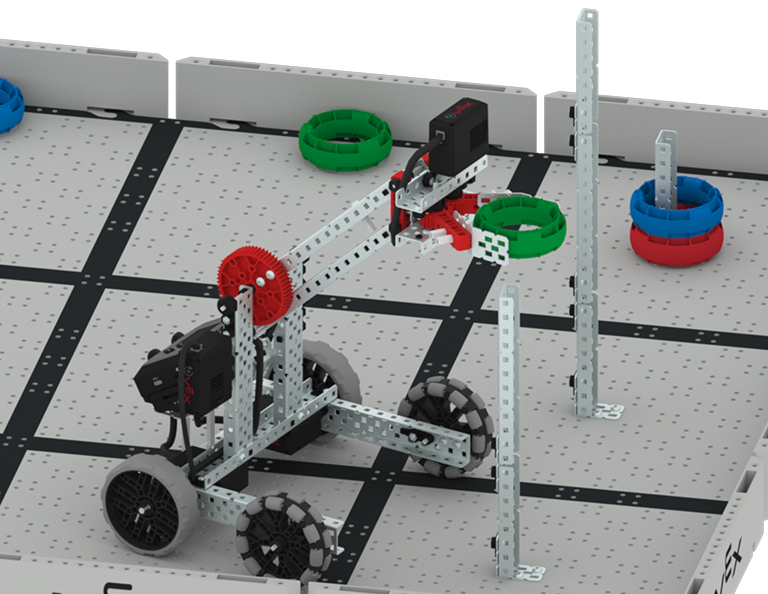
Leader dell'anello
6 Lezioni
In questa unità esplorerai la differenza tra il controllo del conducente e il movimento autonomo, poiché utilizzi più programmi (controllo autonomo e controllo del conducente) per segnare anelli su pali di diverse dimensioni nella competizione Ring Leader!
Visita il Portale degli insegnanti per materiali di supporto e video per gli insegnanti sui contenuti e sulla facilitazione della lezione del Ring Leader.
Lezione 1: Introduzione
In questa lezione, ti verrà presentata la competizione Ring Leader, costruirai il Clawbot e ti preparerai a programmare.
Lezione 2: Controllo del conducente
In questa lezione, imparerai a utilizzare il Programma di Controllo del Pilota sul Cervello EXP in modo da poter guidare il Clawbot per manipolare gli anelli sul Campo e partecipare alla Sfida Velocità e Punteggio.
Lezione 3: Codifica dei movimenti autonomi
In questa lezione, imparerai a codificare il tuo robot per movimenti autonomi, incluso come pianificare il percorso del tuo robot. Quindi, creerai un progetto EXP VEXCODE per posizionare anelli sui post nella Coding Crunch Challenge.
Lezione 4: Utilizzo di più programmi (autonomo e autista partner)
In questa lezione, imparerai a personalizzare i controlli del conducente e come utilizzare il controller e VEXcode EXP per ottimizzare la tua strategia di guida per competere nella Split Decision Challenge.
Lezione 5: Concorso Ring Leader
In questa lezione, applicherai quanto appreso dalle lezioni precedenti per competere nella competizione Ring Leader!
Lezione 6: Conclusione
In questa lezione, rifletterai sull'unità e identificherai le connessioni tra ciò che hai fatto e una carriera STEM connessa.
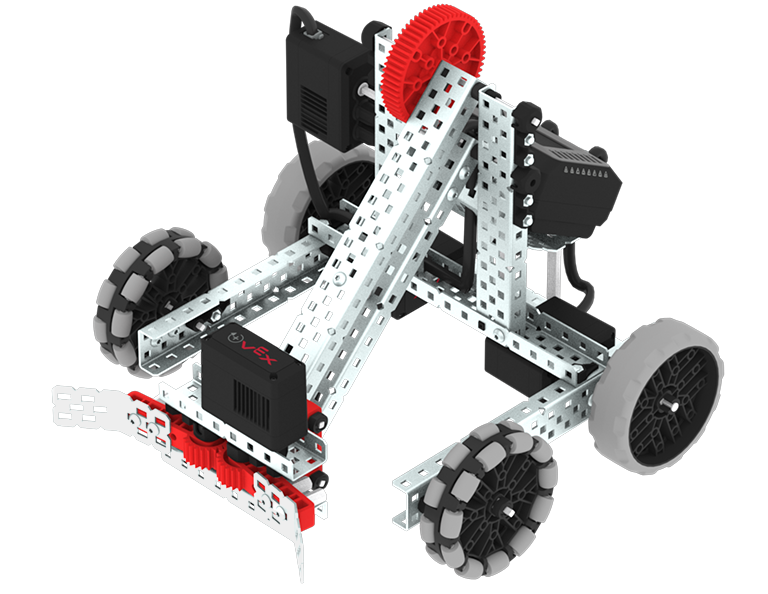
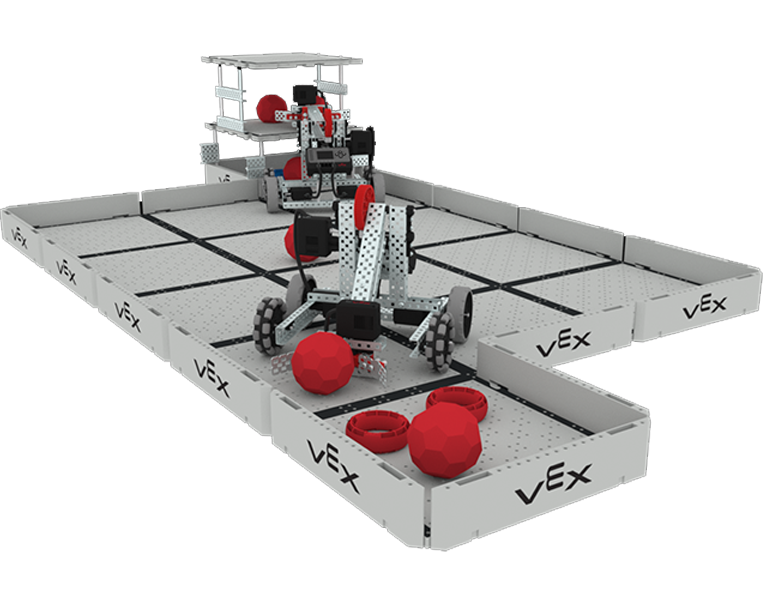
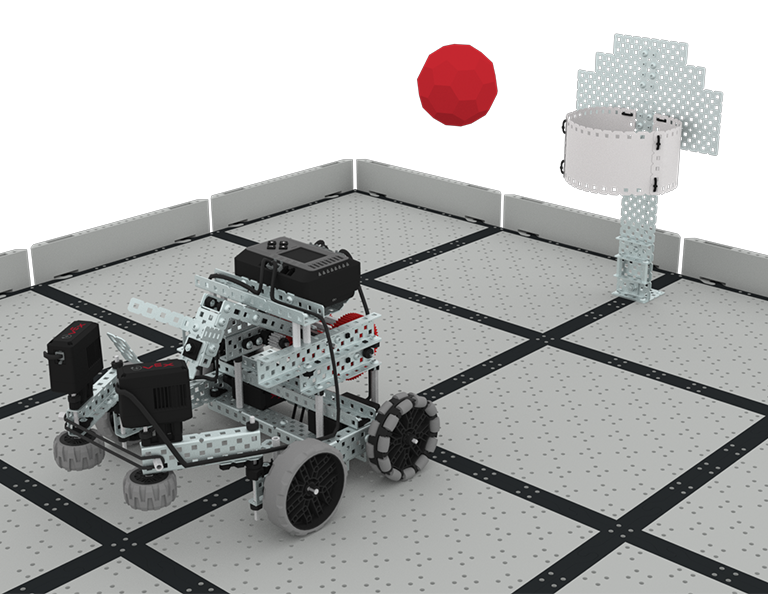
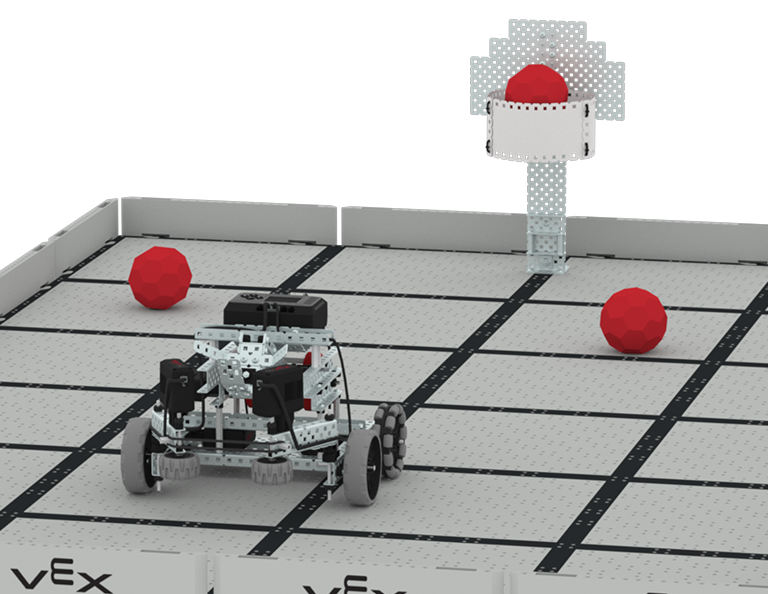
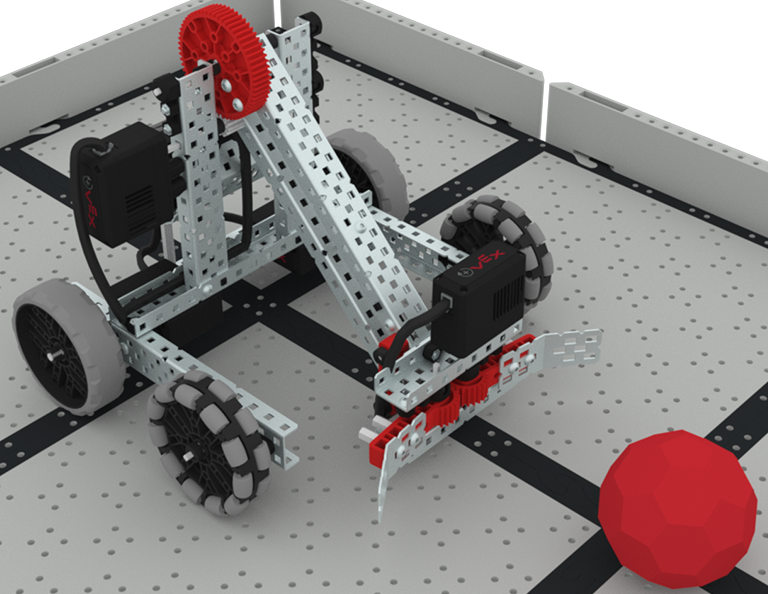
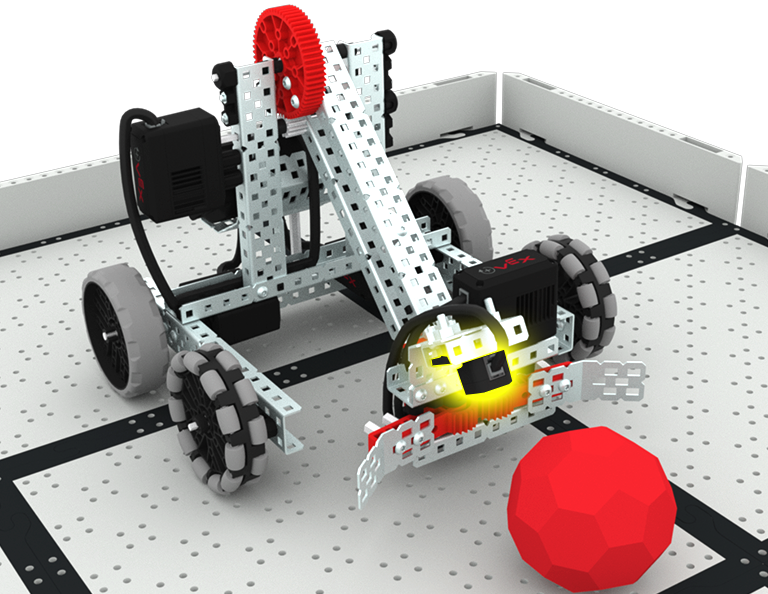
Bucky Basket
4 Lezioni
In questa unità esplorerai come guidare il CatapultBot per raccogliere, sparare e segnare Buckyball nei canestri nella competizione Bucky Basketball!
Visita il Portale degli insegnanti per materiali di supporto e video per gli insegnanti sui contenuti e sulla facilitazione delle lezioni di basket Bucky.
Lezione 1: Introduzione
In questa lezione, costruirai il CatapultBot e ricaricherai il controller e la batteria.
Lezione 2: Guidare il CatapultBot
In questa lezione, imparerai come funzionano l'aspirazione e la catapulta del CatapultBot e come guidarlo usando il Controller per competere nella Buckyball Basket Challenge!
Lezione 3: Competizione di pallacanestro Bucky
In questa lezione, applicherai quanto appreso dalle lezioni precedenti per competere nella competizione Bucky Basketball!
Lezione 4: Conclusione
In questa lezione, rifletterai sull'unità e identificherai le connessioni tra ciò che hai fatto e una carriera STEM connessa.
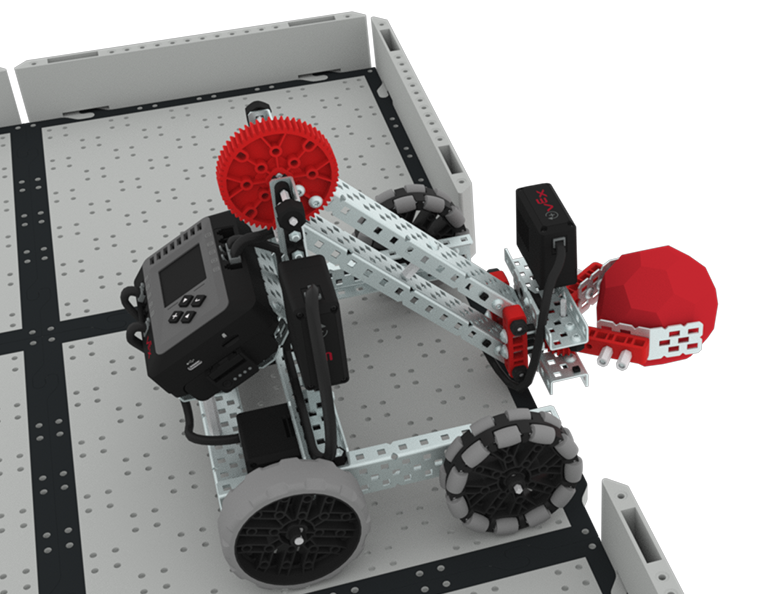
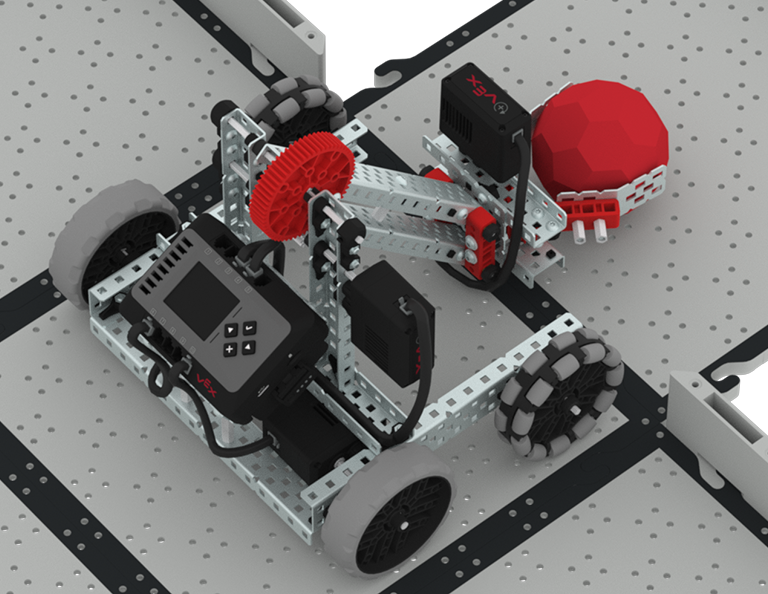
Caccia al tesoro
5 Lezioni
In questa unità costruirai e codificherai il Clawbot con il sensore ottico per riconoscere e raccogliere Buckyball rossi per competere nella competizione Caccia al tesoro!
Visita il Portale degli insegnanti per materiali di supporto e video per gli insegnanti sui contenuti e sulla facilitazione delle lezioni di caccia al tesoro.
Lezione 1: Introduzione
Ti verrà presentato il concorso Caccia al Tesoro, costruirai il Clawbot e ti preparerai a programmare.
Lezione 2: Artiglio senza sensore
In questa lezione, imparerai a utilizzare i blocchi Drivetrain e Motion in VEXcode EXP per codificare il tuo Clawbot per raccogliere e spostare Buckyballs nella Collector Challenge.
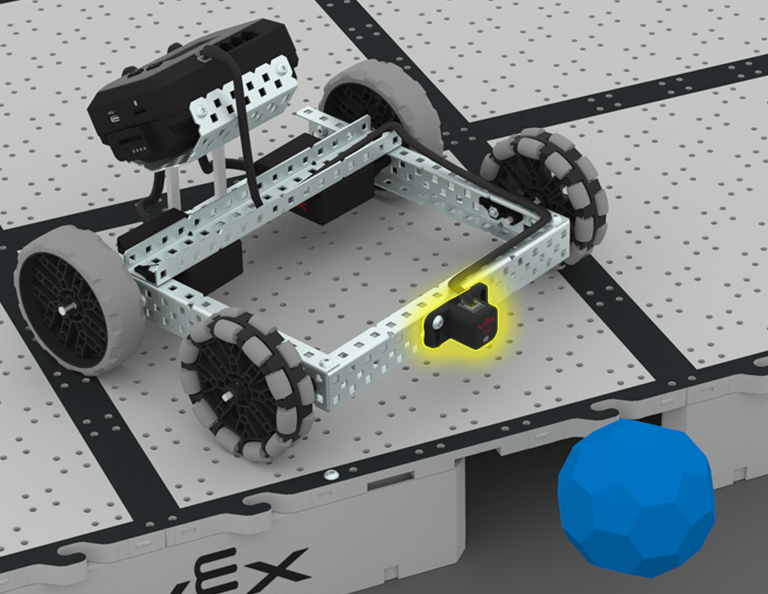
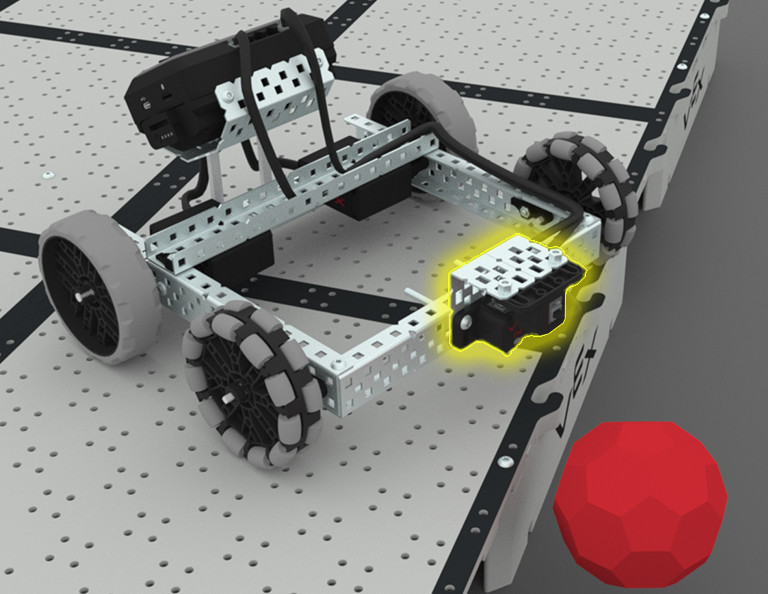
Lezione 3: Artiglio con sensore
In questa lezione, imparerai a codificare il sensore ottico per rilevare, raccogliere e spostare una Buckyball rossa nella sfida Treasure Mover!
Lezione 4: Gara di caccia al tesoro
In questa lezione applicherai quanto appreso dalle lezioni precedenti per competere in una Caccia al Tesoro!
Lezione 5: Conclusione
In questa lezione, rifletterai sull'unità e identificherai le connessioni tra ciò che hai fatto e una carriera STEM.
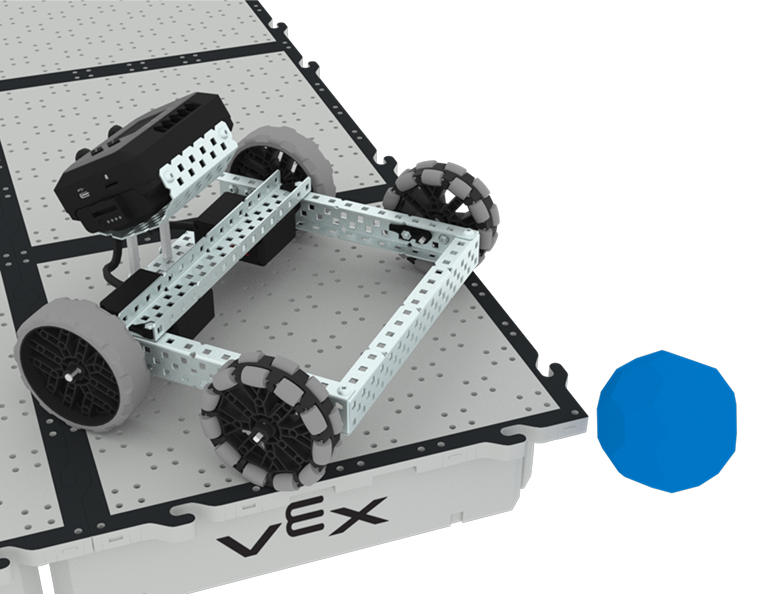
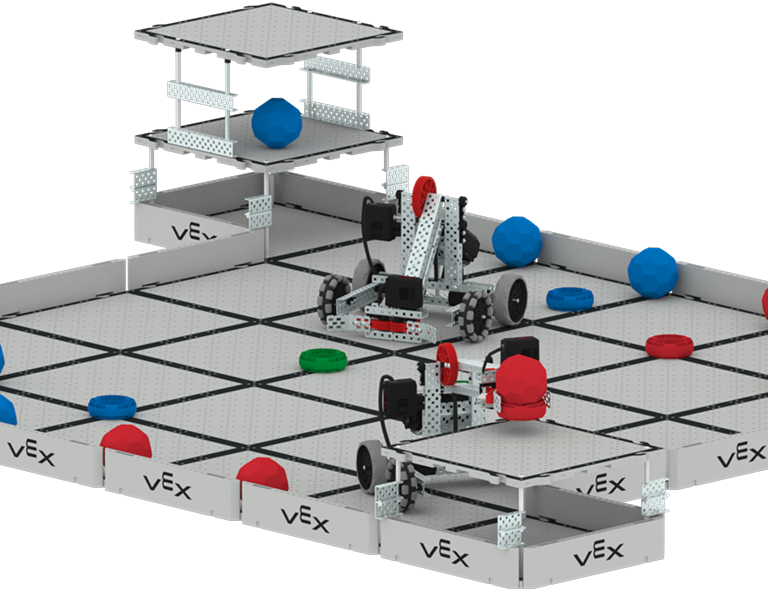
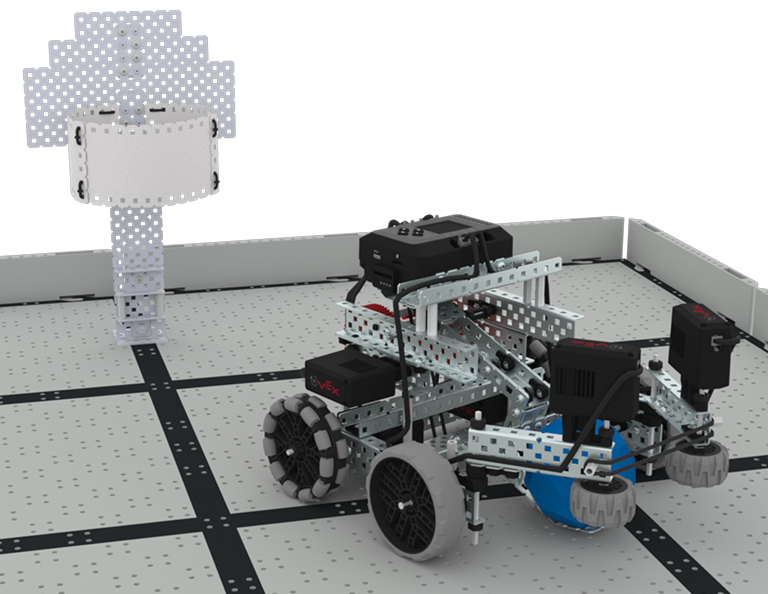
Il distruttore del castello
6 Lezioni
In questa unità esplorerai come utilizzare i sensori ottici e di distanza per cercare, schiantare e liberare i "castelli" di Buckyball per ottenere punti nella competizione Castle Crasher!
Visita il Portale degli insegnanti per materiali di supporto e video per gli insegnanti sui contenuti e sulla facilitazione delle lezioni di Castle Crasher.
Lezione 1: Introduzione
In questa lezione, ti verrà presentata la competizione Castle Crasher, costruirai il BaseBot e ti preparerai a programmare.
Lezione 2: Castle Crasher senza sensori
In questa lezione, imparerai a calcolare gli angoli e a cambiare la velocità del tuo robot in modo da poter competere nella Sfida Sfide rapide Buckyball.
Lezione 3: Castle Crasher + sensore di distanza
In questa lezione imparerai cos'è il sensore di distanza e come può essere utilizzato sul tuo robot. Imparerai anche a conoscere il blocco [Wait until] e come può essere utilizzato in un progetto EXP VEXcode. Quindi applicherai ciò che hai imparato per competere nella Sfida Sense and Sweep!
Lezione 4: Creazione di algoritmi
In questa lezione, imparerai a conoscere il sensore ottico e come creare un algoritmo che utilizza il feedback del sensore. Quindi codificherai il tuo robot per trovare autonomamente le Buckyball e spingerle fuori dal campo nella Sfida Sweep the Field.
Lezione 5: Competizione Castle Crasher
In questa lezione applicherai quanto appreso dalle lezioni precedenti per competere in una competizione Castle Crasher!

Lesson 6: Conclusion
In this Lesson, you will reflect on the Unit and identify connections between what you have done and a STEM career.
Etichetta di congelamento della squadra
6 Lezioni
In questa unità guiderai il tuo robot utilizzando il controller, sceglierai le ruote e aggiungerai un interruttore paraurti per competere nella competizione Team Freeze Tag!
Visita il portale dell'insegnante per materiali di supporto agli insegnanti e video sul contenuto e la facilitazione delle lezioni di tag di blocco del team.
Etichetta di congelamento della squadra Portale dell'insegnante >
Lezione 1: Introduzione
In questa lezione, ti verrà presentato il concorso Team Freeze Tag, imposterai la batteria e il controller e costruirai il BaseBot.
Lesson 2: Driving with the EXP Controller
In this Lesson, you will learn how to drive the BaseBot using the EXP Controller and practice your driving to compete in a challenge activity as you drive in a figure eight!
Lezione 3: Cambiare le ruote
In questa lezione, imparerai come cambiare le ruote del BaseBot e sperimenterai diverse combinazioni di ruote per migliorare la capacità del robot di guidare nella sfida Figure Eight Wheel.
Lezione 4: Aggiunta dell'interruttore del paraurti e stampa alla schermata del cervello
In questa lezione, aggiungerai un interruttore paraurti al tuo BaseBot e imparerai come stampare sulla schermata Cervello per competere nel tag di congelamento 1 contro 1!
Lezione 5: Concorso Team Freeze Tag
In questa lezione, combinerai tutte le abilità apprese nelle lezioni precedenti per giocare a Team Freeze Tag!
Lezione 6: Conclusione
In questa lezione, rifletterai sull'unità e identificherai le connessioni tra ciò che hai fatto e una carriera STEM.