
Pasiruošimas koduoti
Yra integruotų VEXcode IQ išteklių, kurie padės jums pradėti koduoti. Galite pasiekti mokomuosius vaizdo įrašus, žinyną arba projektų pavyzdžius, kad sužinotumėte daugiau apie dalykų, pvz., projekto išsaugojimą, atsisiuntimą ir vykdymą, kaip naudoti konkretų bloką arba pradėti su projektu.
Mokomieji vaizdo įrašai
Norėdami pasiekti mokymo programas, VEXcode IQ įrankių juostoje pasirinkite piktogramą „Pamokos“, kaip parodyta čia.
Šie mokomieji vaizdo įrašai gali būti naudingi norint pradėti naudotis šiuo įrenginiu:
- Darbo pradžia
- Įrenginio sąranka – pavara
- Projekto pavadinimo suteikimas ir išsaugojimas
- Atsisiųskite ir vykdykite projektą
Integruota pagalba
Norėdami pasiekti žinyną, VEXcode IQ pasirinkite 'Help' piktogramą, kaip parodyta čia.
Tada pasirinkite bloką arba komandą, kad sužinotumėte daugiau apie jį.
Pagalbos funkcija suteikia bloko ar komandų konkrečios informacijos, įskaitant tokius dalykus kaip, kaip juos galima naudoti projekte.
Projektų pavyzdžiai
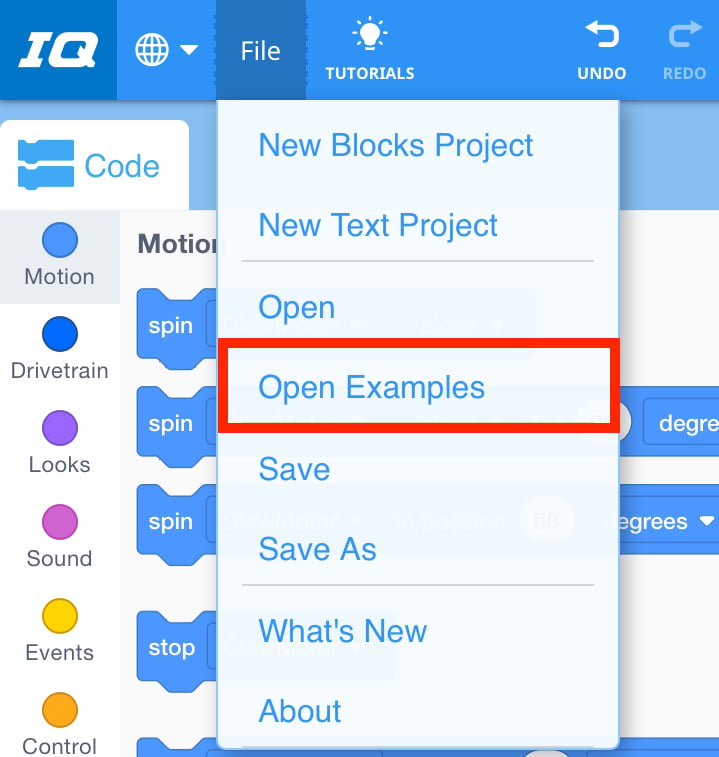
Norėdami pasiekti pavyzdinius projektus, pasirinkite „Failas“, tada „Atidaryti pavyzdžius“, kaip parodyta čia.
Pradedant projektą, kuris padės pradėti kodavimą, galite naudoti projekto pavyzdį. Projektų pavyzdžiai apima įvairių VEX IQ versijų šablonus, taip pat įvairių funkcijų ir funkcijų pavyzdinius projektus.
Šiame skyriuje galima naudoti šį šablono projekto pavyzdį:
- Basebot (2 variklių pavara)
Kas toliau?
Šioje pamokoje sukūrėte „BaseBot“ ir įkrovėte akumuliatorių.
Kitoje pamokoje jūs:
- Sužinokite, kaip subalansuotos ir nesubalansuotos jėgos veikia jūsų roboto judėjimą.
- Sukurkite savo BaseBot virvės priedą.
- Konkuruokite Robot Tractor Pull iššūkyje!
Pasirinkite < Grįžti į pamokas, kad grįžtumėte į pamokos apžvalgą.
Pasirinkite Kita pamoka > , kad pereitumėte prie 2 pamokos ir sužinokite, kaip jėgos veikia jūsų roboto judėjimą.