
พื้นหลัง
หน่วย Mars Rover: สำรวจธรณีวิทยาดาวอังคารจะช่วยให้คุณและนักเรียนของคุณคุ้นเคยกับการสร้างโปรเจ็กต์ VEXcode GO เพื่อแก้ไขปัญหา การกระทำของรถสำรวจเพอร์เซเวียแรนซ์และภารกิจดาวอังคาร 2020 ถูกนำมาใช้เป็นแรงบันดาลใจสำหรับความท้าทายที่นักเรียนจะได้ทำงานโดยใช้ VEXcode GO และหุ่นยนต์ Code Base โปรเจ็กต์ที่พวกเขาสร้างขึ้นจะต้องขับเคลื่อนเพื่อรวบรวมดิสก์และใช้ข้อมูลเซ็นเซอร์เพื่อจัดเรียงตามสี
ภารกิจ Mars 2020 ของ NASA
ภารกิจ Mars 2020 ของ NASA กล่าวถึงเป้าหมายทางวิทยาศาสตร์ที่มีความสำคัญสูงสำหรับการสำรวจดาวอังคาร ได้แก่ ชีวิต สภาพภูมิอากาศ ธรณีวิทยา และมนุษย์ ยานสำรวจเพอร์เซเวียแรนซ์แห่งดาวอังคาร 2020 ได้รับการออกแบบเพื่อให้เข้าใจธรณีวิทยาของดาวอังคารได้ดีขึ้น และค้นหาสัญญาณของสิ่งมีชีวิตโบราณ ภารกิจนี้จะสำรวจพื้นที่รอบๆ ปล่องภูเขาไฟเจเซโร ซึ่งเป็นจุดลงจอดที่มีความหลากหลายทางธรณีวิทยา โดยเฉพาะอย่างยิ่งในการค้นหาหินพิเศษที่ทราบกันดีว่ามีสัญญาณของสิ่งมีชีวิตอยู่ตลอดเวลา1.
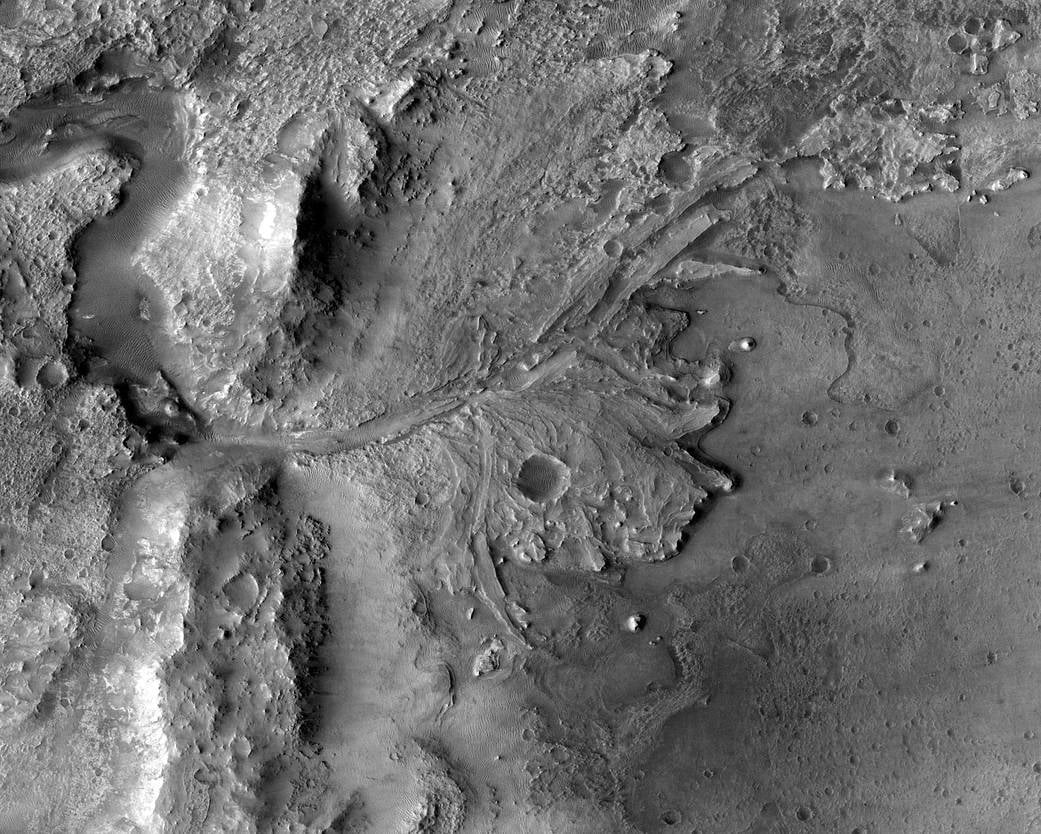
นักวิทยาศาสตร์เชื่อว่าบริเวณปล่องภูเขาไฟจาเซโรเคยถูกน้ำท่วมและเป็นที่ตั้งของสามเหลี่ยมปากแม่น้ำโบราณ นักวิทยาศาสตร์พบหลักฐานว่าน้ำได้พัดพาแร่ดินเหนียวจากพื้นที่โดยรอบไปสู่ทะเลสาบปล่องภูเขาไฟ อาจเป็นไปได้ว่าชีวิตจุลินทรีย์อาจอาศัยอยู่ในเมืองเจเซโรได้ในช่วงที่มีฝนตกหนักครั้งหนึ่งหรือหลายครั้ง หากเป็นเช่นนั้น อาจพบสัญญาณของซากพวกมันในตะกอนใต้ทะเลสาบหรือริมชายฝั่ง นักวิทยาศาสตร์จะศึกษาว่าภูมิภาคนี้ก่อตัวและวิวัฒนาการขึ้นมาได้อย่างไร ค้นหาสัญญาณของสิ่งมีชีวิตในอดีต และเก็บตัวอย่างหินและดิน ดาวอังคารที่อาจรักษาสัญญาณเหล่านี้ไว้ได้
นักธรณีวิทยาดาวเคราะห์คืออะไร?
นักธรณีวิทยาดาวเคราะห์เป็นผู้ศึกษาว่าวัตถุท้องฟ้า (ดาวเคราะห์ ดวงจันทร์ ดาวเคราะห์น้อย ดาวหาง และอุกกาบาต) ก่อตัวและวิวัฒนาการตามกาลเวลาอย่างไร พวกเขาใช้สิ่งที่เราเรียนรู้เกี่ยวกับโลกเพื่อพยายามทำความเข้าใจว่าวัตถุท้องฟ้าอื่นทำงานอย่างไร นักธรณีวิทยาดาวเคราะห์ศึกษาหัวข้อต่างๆ เช่น การกำหนดโครงสร้างภายในของดาวเคราะห์ และยังดูกระบวนการบนพื้นผิว เช่น ภูเขาไฟบนดาวเคราะห์อีกด้วย นักธรณีวิทยาดาวเคราะห์ต้องใช้ข้อมูลน้อยกว่านักธรณีวิทยาภาคพื้นดินมาก เนื่องจากพวกเขาไม่สามารถออกไปยังภาคสนามเพื่อรวบรวมข้อมูลด้วยตนเองได้ พวกเขาจึงต้องพึ่งพาข้อมูลจากระยะไกลเป็นหลัก
Rover คืออะไร?
นักธรณีวิทยาดาวเคราะห์ทำงานร่วมกับยานสำรวจเพื่อรวบรวมข้อมูลเกี่ยวกับภูมิประเทศและเก็บตัวอย่างหิน ดิน ดิน หรือแม้แต่ของเหลว ยานสำรวจคืออุปกรณ์ที่ได้รับการออกแบบให้เคลื่อนที่ผ่านพื้นผิวแข็งของดาวเคราะห์หรือวัตถุท้องฟ้าอื่นๆ (เช่น ดาวอังคาร) เนื่องจากนักวิทยาศาสตร์ไม่สามารถเดินทาง ยังดาวอังคารได้ด้วยตนเองในขณะนี้ พวกเขาจึงต้องอาศัยนักธรณีวิทยาหุ่นยนต์ หรือรถสำรวจ เพื่อวิเคราะห์หินและดิน และรวบรวมข้อมูลให้กับพวกเขา
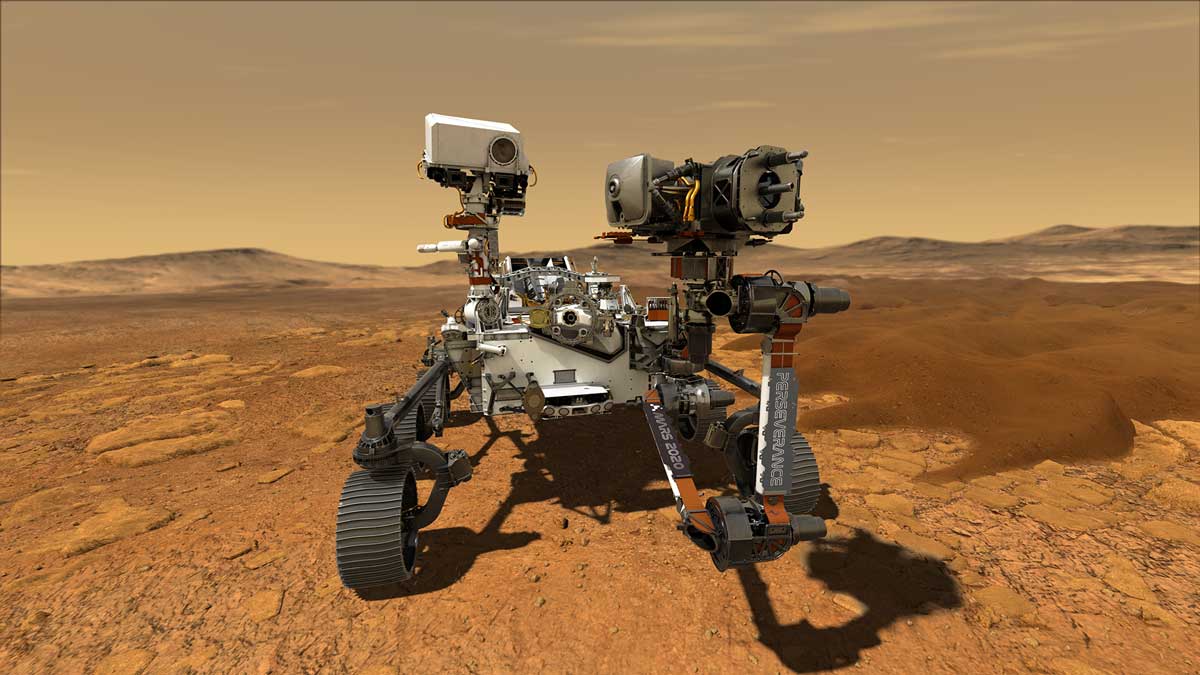
ปัจจุบันรถสำรวจเพอร์เซเวียแรนซ์กำลังทำภารกิจสำรวจดาวอังคารของ NASA เสร็จสิ้นแล้ว และจะเก็บตัวอย่างหินและดินเพื่อส่งกลับมายังโลกในที่สุด ในการทำงาน ยานสำรวจเพอร์เซเวียแรนซ์จะบรรทุกเซ็นเซอร์และเครื่องมือวิทยาศาสตร์จำนวนหนึ่งที่จะวิเคราะห์หินและดินบนพื้นผิวดาวอังคาร และดำเนินการภารกิจและการศึกษาวิจัยที่สำคัญอื่นๆ For more information on the Mars 2020 Mission and details on the features of the Perseverance Rover, see NASA’s Mars 2020 Mission Overview website.
เซ็นเซอร์คืออะไร?
เซ็นเซอร์คืออุปกรณ์ที่ช่วยให้หุ่นยนต์เข้าใจโลกที่อยู่รอบตัวมัน ซึ่งทำได้โดยการรวบรวมและรายงานข้อมูลเกี่ยวกับสภาพแวดล้อม ซึ่งสามารถนำไปใช้ในโครงการเพื่อให้หุ่นยนต์ตัดสินใจหรือแสดงพฤติกรรมบางอย่างได้ ลำดับนี้สามารถคิดได้ว่าเป็นวงจรการตัดสินใจแบบ “Sense Think Act”
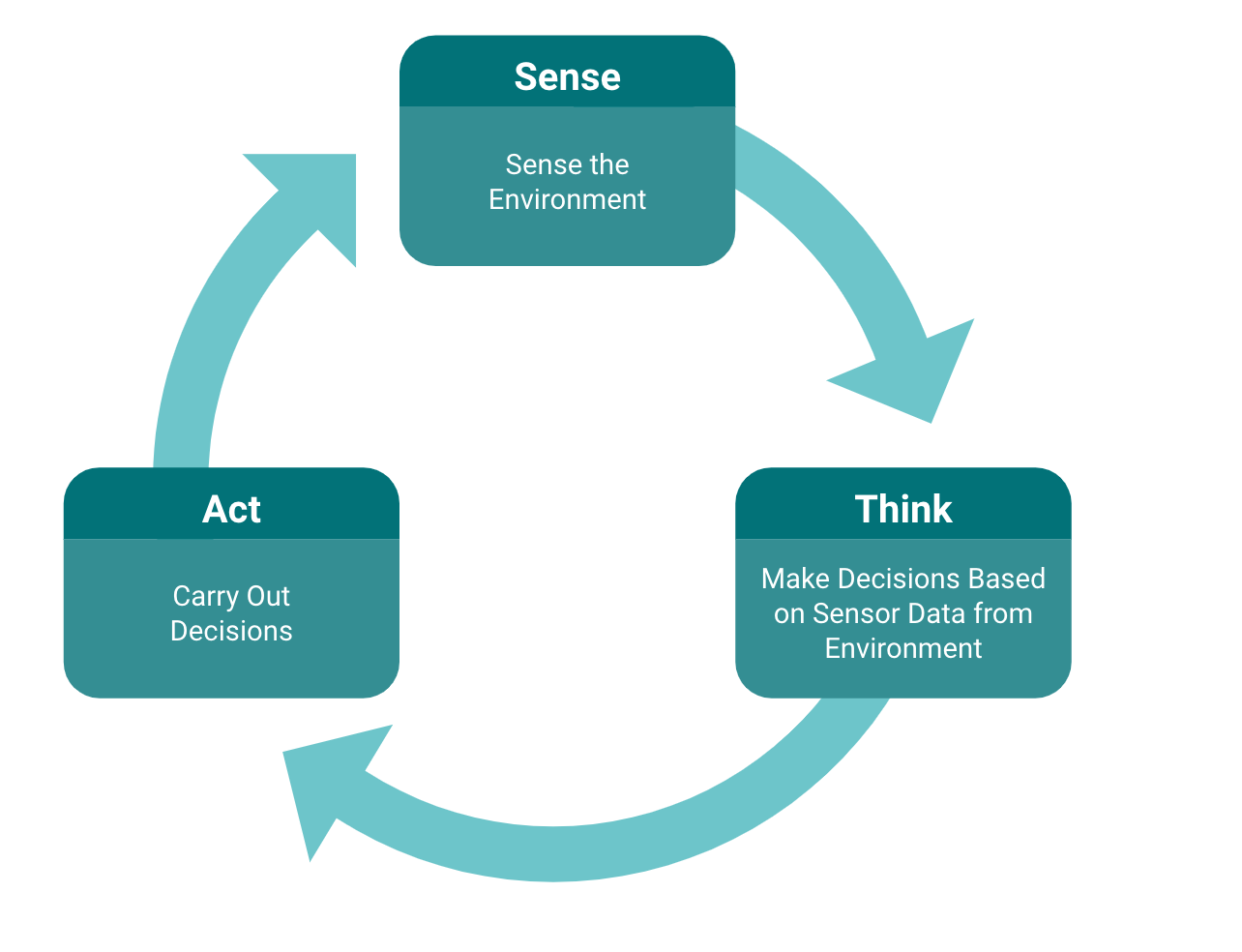
ในหน่วยนี้ ฐานโค้ดจะใช้เซ็นเซอร์ตาเพื่อตรวจจับสีของดิสก์ที่ถูกแม่เหล็กไฟฟ้าหยิบขึ้นมา ทั้งเซ็นเซอร์ตาและแม่เหล็กไฟฟ้าเป็นเซ็นเซอร์ที่ช่วยให้ฐานโค้ดโต้ตอบกับสภาพแวดล้อมได้และดำเนินการตัดสินใจตามวงจร Sense Think Act ในโปรเจ็กต์ที่นักเรียนสร้างขึ้น แม่เหล็กไฟฟ้าจะหยิบดิสก์ขึ้นมา และเซนเซอร์ตรวจจับดวงตาจะตรวจจับสีของดิสก์ จากนั้นคำสั่ง VEXcode GO จะคิดเพื่อตัดสินใจโดยพิจารณาจากสีของดิสก์ที่ตรวจพบ จากนั้นฐานโค้ดจะดำเนินการโดยขับรถไปยังตำแหน่งที่ระบุและปล่อยดิสก์ตามสีที่ตรวจพบ
แม่เหล็กไฟฟ้าคืออะไร?
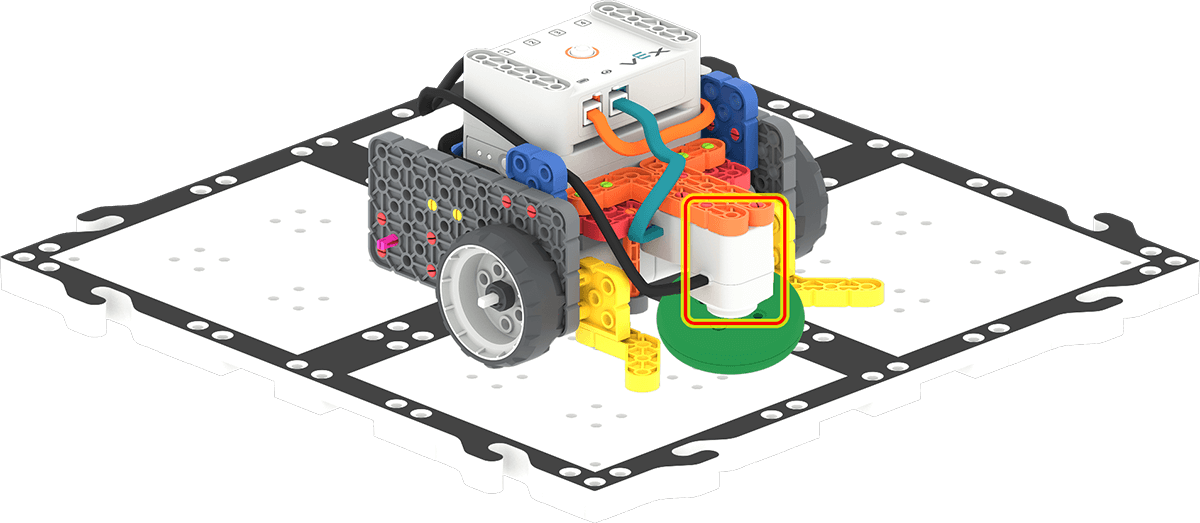
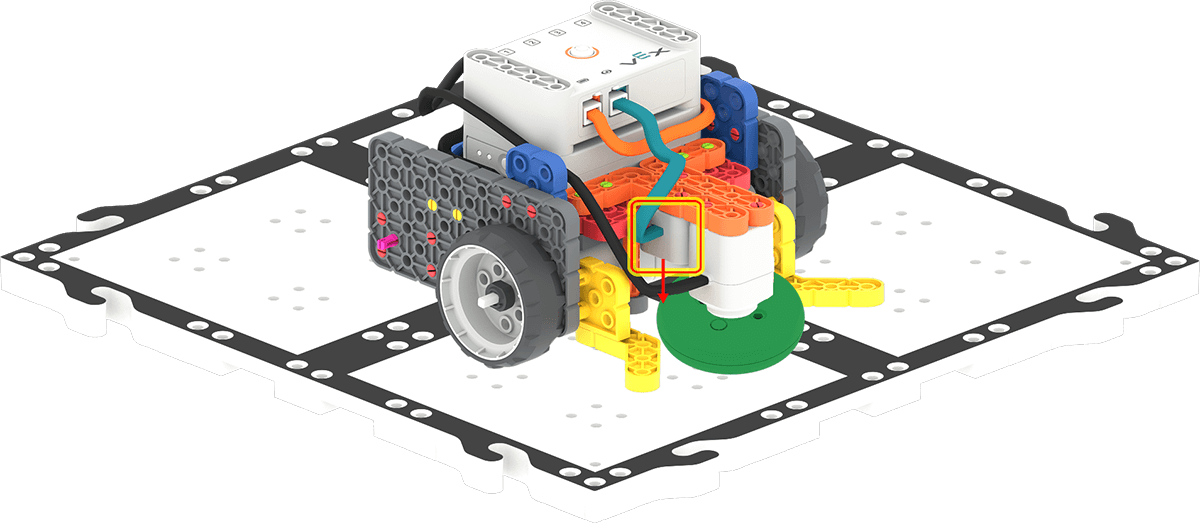
แม่เหล็กไฟฟ้าคือแม่เหล็กชนิดหนึ่งซึ่งสร้างสนามแม่เหล็กจากกระแสไฟฟ้า แม่เหล็กไฟฟ้า VEX GO สามารถรับและวางดิสก์ที่มีแกนโลหะได้ โค้ดเบส - อาย + แม่เหล็กไฟฟ้ามีแม่เหล็กไฟฟ้าอยู่ที่ด้านหน้าของหุ่นยนต์
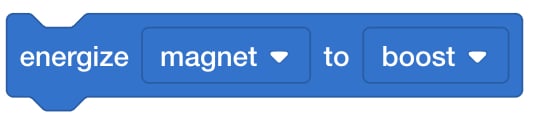
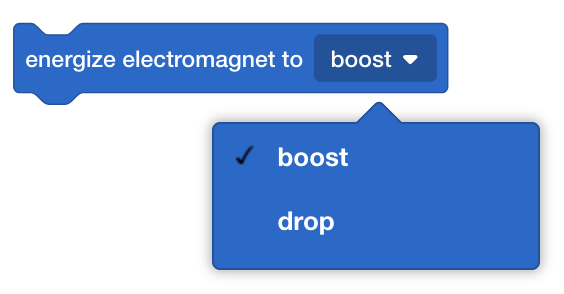
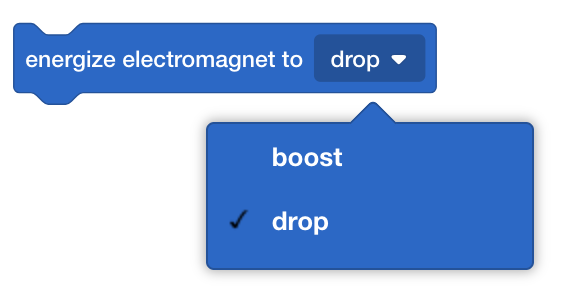
บล็อก [Energize electromagnet] ใช้เพื่อ 'เพิ่มพลัง' และ 'ลดพลัง' ดิสก์ใน VEXcode GO
การตั้งค่า 'เพิ่ม' ช่วยให้คุณสามารถหยิบดิสก์ขึ้นมาได้
การตั้งค่า 'ปล่อย' ช่วยให้คุณปล่อยดิสก์ได้
For more information on using the Electromagnet, see the Coding with the VEX GO Electromagnet VEX Library Article.
เซ็นเซอร์ตาคืออะไร?
เซ็นเซอร์ตาคือเซ็นเซอร์ที่สามารถตรวจจับสามสิ่ง ได้แก่ การมีอยู่ของวัตถุ สีของวัตถุ และความสว่างของวัตถุหรือพื้นผิว ในฐานโค้ด - การสร้าง Eye + Electromagnet เซ็นเซอร์ Eye จะอยู่ด้านหลัง Electromagnet และชี้ลงด้านล่าง วิธีนี้จะทำให้เซ็นเซอร์ตาสามารถตรวจจับสีของดิสก์ได้ เพื่อให้สามารถเรียงลำดับตามสีได้ For more information on the different uses of the Eye Sensor, see the Coding with the VEX GO Eye Sensor VEX Library Article.
ข้อมูลที่รายงานโดย Eye Sensor สามารถดูได้ใน Monitor Console ซึ่งมอบภาพตัวแทนของสิ่งที่หุ่นยนต์กำลัง "มองเห็น" ให้กับผู้เรียน และสามารถใช้เพื่อช่วยให้พวกเขาเชื่อมโยงเซ็นเซอร์กับพฤติกรรมของหุ่นยนต์ได้ For more information about using the Monitor Console in VEXcode GO, see this VEX Library article.
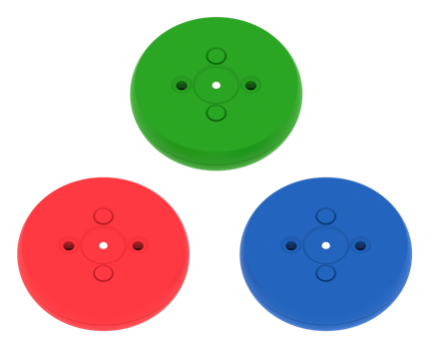
ดิสก์ VEX GO
ดิสก์ที่จะใช้ในหน่วยนี้จะมีสามสีที่แตกต่างกัน: เขียว แดง และน้ำเงิน ดิสก์มีแกนเป็นโลหะ และสามารถใช้กับแม่เหล็กไฟฟ้าได้ ดิสก์ยังสามารถใช้ร่วมกับเซ็นเซอร์ตาเพื่อตรวจจับสีและวัตถุได้ For more information on the Electromagnet or the Disks, see the Interactive Parts Poster linked in the VEX Library.
การย่อยสลาย
การย่อยสลายเกี่ยวข้องกับการแบ่งปัญหาที่ซับซ้อนออกเป็นพฤติกรรมที่สามารถจัดการได้และเข้าใจได้ง่ายขึ้น การแบ่งปัญหาออกเป็นส่วนย่อยๆ จะทำให้สามารถตรวจสอบแต่ละส่วนได้อย่างละเอียดมากขึ้นและแก้ไขได้ง่ายขึ้น ตัวอย่างเช่น หากนักเรียนต้องการให้หุ่นยนต์ของตนเคลื่อนที่เป็นสี่เหลี่ยม พวกเขาจะต้องแบ่งหุ่นยนต์ออกเป็นคำสั่งที่เล็กลง การปรับปรุงกระบวนการแยกย่อยเป็นสิ่งสำคัญสำหรับการฝึกฝนเพื่อให้ผู้เรียนได้ฝึกฝน เนื่องจากในตอนแรกพวกเขาอาจไม่ได้แยกคำสั่งออกเป็นส่วนประกอบที่เล็กลง:
| เคลื่อนที่ในลักษณะแยกเป็นสี่เหลี่ยมจัตุรัส 1 | เคลื่อนที่ในการแบ่งช่องสี่เหลี่ยม 2 | เคลื่อนที่ในการแบ่งช่อง 3 |
|---|---|---|
|
|
|
รหัสเทียม
Pseudocode คือสัญลักษณ์การเขียนย่อสำหรับการเข้ารหัส ซึ่งรวมคำอธิบายของโค้ดทั้งในรูปแบบวาจาและลายลักษณ์อักษร
บ่อยครั้งที่นักเรียนสามารถ "เดาและตรวจสอบ" หาทางแก้ปัญหา อย่างไรก็ตาม สิ่งนี้ไม่ได้ทำให้พวกเขามีความเข้าใจในเชิงแนวคิดของการเข้ารหัส การเขียน pseudocode ช่วยให้นักเรียนเข้าใจการเขียนโค้ดจากระดับผิวเผินไปสู่ความเข้าใจในเชิงแนวคิดมากขึ้น Pseudocode ต้องการให้ผู้เรียนคิดเชิงแนวคิดเกี่ยวกับวิธีเขียนโค้ดก่อนที่จะเริ่มต้นเขียนโค้ด ครูควรหารือเรื่อง pseudocode กับนักเรียนโดยถามนักเรียนดังนี้:
- พวกเขาต้องการให้โครงการของพวกเขาบรรลุผลอะไร?
- คุณจะแบ่งความตั้งใจหรือเป้าหมายของโครงการออกเป็นข้อความสั้น ๆ ที่เฉพาะเจาะจงได้อย่างไร
ในตัวอย่างนี้ หากขอให้เด็กนักเรียนสร้างซูโดโค้ดเพื่อให้หุ่นยนต์เคลื่อนที่ไปข้างหน้า ตรวจจับกำแพง เลี้ยวขวา จากนั้นจึงเคลื่อนที่ไปข้างหน้าอีกครั้ง จะเป็นดังต่อไปนี้:
- ขับเคลื่อนหุ่นยนต์ไปข้างหน้าจนกระทั่งห่างจากผนัง 50 มม.
- หยุดหุ่นยนต์
- หมุนหุ่นยนต์ 90 องศา
- หยุดหุ่นยนต์
- ขับเคลื่อนไปข้างหน้า 600 มม.
เมื่อสร้างซูโดโค้ดแล้ว นักเรียนจะต้องสร้างโค้ดเพื่อสั่งหุ่นยนต์ว่าจะต้องทำอย่างไรจึงจะเสร็จสมบูรณ์ในแต่ละขั้นตอนของซูโดโค้ด สำหรับข้อมูลเพิ่มเติมเกี่ยวกับวิธีการทำงานกับ pseudocode โปรดดูที่บทช่วยสอน Pseudocode ใน VEXcode GO
VEXcode GO คืออะไร?
VEXcode GO เป็นสภาพแวดล้อมการเขียนโค้ดที่ใช้ในการสื่อสารกับหุ่นยนต์ VEX GO นักเรียนใช้อินเทอร์เฟซแบบลากและวางเพื่อสร้างโปรเจ็กต์ VEXcode GO เพื่อควบคุมการกระทำของหุ่นยนต์ วัตถุประสงค์ของแต่ละบล็อกสามารถระบุได้โดยใช้สิ่งบ่งชี้ทางภาพ เช่น รูปร่าง สี และป้ายกำกับ For more information on how to work with VEXcode GO, see the VEXcode GO Section of the VEX Library.
บล็อคใน VEXcode GO แสดงถึงคำสั่งหุ่นยนต์ที่ใช้ในการสร้างโปรเจ็กต์ใน VEXcode GO ต่อไปนี้เป็นรายการบล็อกหลักที่ใช้ในหน่วยนี้ For more information on block shapes and their meaning, see the Understanding Block Shapes in VEXcode GO VEX Library article. You can find additional information on My Blocks and how to use them in a project in the Using My Blocks in VEXcode GO VEX Library article.
| บล็อก VEXcode GO | พฤติกรรม |
|---|---|
 |
บล็อก {When started} เริ่มต้นการรันสแต็กบล็อกที่แนบมาเมื่อเริ่มต้นโครงการ |
 |
บล็อก [Drive] จะขยับระบบส่งกำลังไป ในระยะทางที่กำหนด |
 |
บล็อก [หมุนเพื่อ] หมุนระบบส่งกำลังตามระยะทางที่กำหนด |
 |
บล็อก [If then] เป็นบล็อก 'C' ที่รันบล็อกภายในถ้าเงื่อนไขบูลีนถูกรายงานว่าเป็น TRUE |
 |
บล็อก [Energize electromagnet] จะตั้งค่าแม่เหล็กไฟฟ้า VEX GO ให้เป็นสองโหมดที่แตกต่างกัน: เพิ่มหรือลดลง |
 |
บล็อก <Detects color> รายงานว่าเซนเซอร์ตาตรวจพบสีที่ระบุของวัตถุหรือไม่ |
 |
บล็อกของฉัน (คำจำกัดความ) ใช้เพื่อกำหนดกลุ่มบล็อก |
 |
บล็อก My Blocks (คำสั่ง) ใช้สำหรับดำเนินการตามบล็อกที่กำหนดไว้ |
 |
บล็อก [ความคิดเห็น] ช่วยให้คุณสามารถเขียนข้อมูลเพื่อช่วยอธิบายสิ่งที่คุณต้องการให้เกิดขึ้นในโครงการของคุณ |
บล็อกของฉันทำงานอย่างไร?
บล็อกของฉันใช้เพื่อสร้างลำดับบล็อกที่สามารถใช้ซ้ำได้หลายครั้งตลอดทั้งโครงการ แทนที่จะสร้างลำดับเดียวกันทุกครั้ง จะง่ายกว่าหากจัดกลุ่มลำดับของบล็อกให้เป็นบล็อกเดียว เมื่อสร้าง My Block คุณจะต้องสร้างลำดับเพียงครั้งเดียว จากนั้นคุณก็สามารถนำกลับมาใช้ซ้ำได้ สิ่งนี้สามารถช่วยแยกโครงการยาวๆ ออกเพื่อให้ทำงานได้ง่ายขึ้น ชมวิดีโอด้านล่างเพื่อดูวิธีใช้ My Blocks ในโปรเจ็กต์ วิดีโอการสอนต่อไปนี้พบได้ใน VEXcode GO และแสดงวิธีใช้ My Blocks ในโปรเจ็กต์ วิดีโอนี้ยังฝังอยู่ในห้องปฏิบัติการที่ 4 ด้วย ดังนั้นคุณจึงสามารถแชร์กับนักเรียนของคุณได้ (คุณและนักเรียนของคุณสามารถเข้าถึงวิดีโอนี้ และบทช่วยสอน VEXcode GO ทั้งหมดได้ตลอดเวลาใน VEXcode GO)
For more information on using My Blocks, see the Using My blocks in VEXcode GO VEX Library article.
การเตรียมพร้อมสำหรับความท้าทายแบบเปิดในหน่วยนี้
ในหน่วยนี้ นักเรียนจะถูกขอให้ใช้สิ่งที่เรียนรู้ก่อนหน้านี้เพื่อสร้างโครงการเพื่อแก้ไขความท้าทาย เนื่องจากการท้าทายนักเรียนให้แก้ปัญหาและนำทักษะที่เรียนรู้ไปใช้ในรูปแบบใหม่ ๆ เป็นประจำนั้นมีความสำคัญ เราจึงขอสนับสนุนให้คุณท้าทายนักเรียนของคุณและใช้กลยุทธ์เหล่านี้เพื่อสร้างความยืดหยุ่นและช่วยแนะนำพวกเขาตลอดกิจกรรมในห้องปฏิบัติการ ต่อไปนี้เป็นข้อเสนอแนะบางประการที่จะช่วยนักเรียนในการทดลองกับโครงการของพวกเขา:
ให้ข้อเสนอแนะโดยไม่ให้คำตอบ - การทำผิดพลาดขณะทำงานเผชิญกับความท้าทายเป็นสิ่งที่คาดหวังและสนับสนุน “ข้อผิดพลาดในการเรียนรู้สามารถสร้างโอกาส [และ] ช่วยสร้างความเชื่อมโยงได้”2 การสร้างกระบวนการแก้ปัญหาที่คุ้นเคยร่วมกับนักเรียนของคุณสามารถช่วยให้พวกเขาเรียนรู้วิธีระบุปัญหาและก้าวไปข้างหน้าเมื่อพวกเขาทำผิดพลาด จึงลดการหยุดชะงักและความหงุดหงิดให้น้อยที่สุด ลองใช้วงจรการแก้ปัญหาต่อไปนี้กับนักเรียนของคุณเพื่อช่วยพวกเขาในการแก้ไขปัญหาโครงการและคิดหาแนวทางแก้ปัญหาของตนเอง
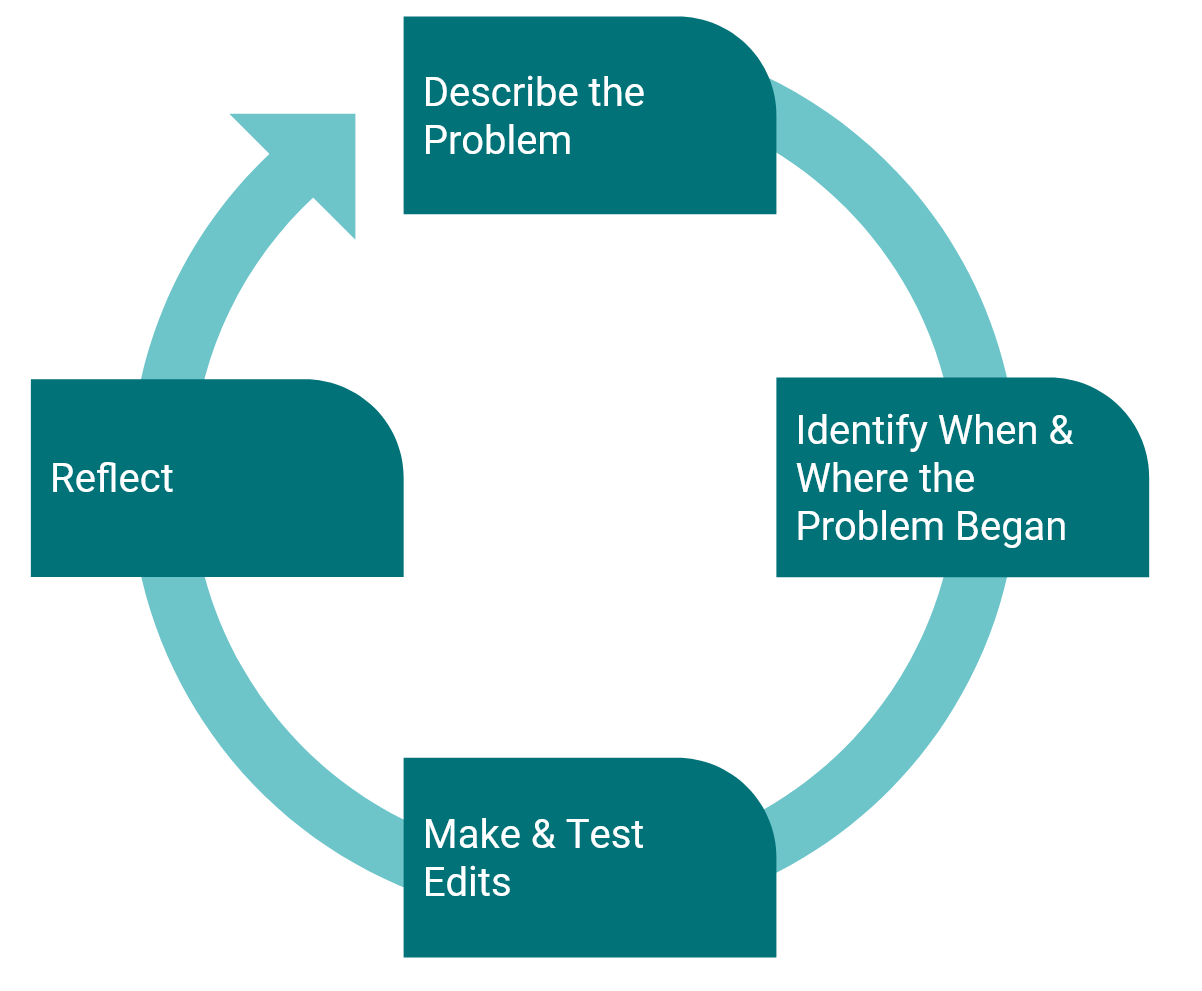
- อธิบายปัญหา
- ขอให้นักเรียนอธิบายว่ามีอะไรผิด นักเรียนควรสามารถเชื่อมโยงข้อผิดพลาดกลับไปยังเป้าหมายร่วมหรือความท้าทายที่อยู่ตรงหน้าได้
- Code Base มีความคืบหน้าอย่างไรในโครงการของพวกเขา? หุ่นยนต์ควรเคลื่อนไหวอย่างไร?
- ขอให้นักเรียนอธิบายว่ามีอะไรผิด นักเรียนควรสามารถเชื่อมโยงข้อผิดพลาดกลับไปยังเป้าหมายร่วมหรือความท้าทายที่อยู่ตรงหน้าได้
- ระบุเมื่อและสถานที่ที่ปัญหาเริ่มต้น
- ถามนักเรียนว่าสังเกตเห็นปัญหานี้ครั้งแรกเมื่อใด
- โครงการกำลังดำเนินการอยู่ในส่วนใด?
- หากนักเรียนประสบปัญหาในการระบุว่าข้อผิดพลาดอยู่ที่ส่วนใดของโปรเจ็กต์ ให้แนะนำให้พวกเขาใช้คุณลักษณะ Project Stepping ใน VEXcode GO คำแนะนำทางภาพที่มีอยู่ในฟีเจอร์ Project Stepping สามารถใช้เพื่อช่วยให้นักเรียนแก้ไขปัญหาโครงการของตนได้โดยสามารถดูบล็อกที่กำลังดำเนินการทีละบล็อกได้ This will give them a better visual of which blocks may be causing the error, so debugging can become a more targeted and efficient process. For more information on how to use the Project Stepping feature, see the Stepping Through a Project in VEXcode GO VEX LibraryArticle.
- ถามนักเรียนว่าสังเกตเห็นปัญหานี้ครั้งแรกเมื่อใด
- ทำการทดสอบแก้ไข &
- เมื่อนักเรียนพบข้อผิดพลาด พวกเขาควรแก้ไขโครงการของตน นักเรียนสามารถทดสอบโครงการด้วยการแก้ไขแต่ละครั้ง หากโครงการประสบความสำเร็จ พวกเขาสามารถไปยังขั้นตอนถัดไปในวงจรการแก้ปัญหาได้ หากโครงการไม่ประสบความสำเร็จ พวกเขาสามารถย้อนกลับไปยังจุดเริ่มต้นของกระบวนการและลองใหม่อีกครั้ง
- สะท้อน
- ขอให้นักเรียนคิดถึงข้อผิดพลาดที่พวกเขาทำและเอาชนะในระหว่างกระบวนการ
- เกิดความผิดพลาดอะไร? คุณได้เรียนรู้อะไรจากความผิดพลาดนี้? มันช่วยคุณได้อย่างไรเมื่อต้องเขียนโค้ดฐานครั้งต่อไป?
- ส่งเสริมให้ผู้เรียนตระหนักถึงความผิดพลาดของตนเองและเรียนรู้สิ่งที่ได้เรียนรู้จากกระบวนการนั้น เพื่อช่วยส่งเสริมให้มีทัศนคติเชิงเติบโต การเน้นย้ำอย่างหนักถึงทัศนคติการเติบโตสามารถช่วยให้ผู้เรียนเรียนรู้ว่าเมื่อใดและอย่างไรจึงควรจะยืนหยัดต่อไป รวมถึงเรียนรู้ว่าเมื่อใดควรขอความช่วยเหลือ3 หากผู้เรียนสามารถมองกระบวนการของตนเป็นจุดเริ่มต้นของการเรียนรู้สิ่งใหม่ พวกเขาก็สามารถใช้ขั้นตอนต่างๆ ที่นี่เพื่อส่งเสริมการเรียนรู้ของตนเองและเพื่อนร่วมชั้นเรียนได้ด้วย เมื่อนักเรียนเผชิญกับปัญหาเหล่านี้และไตร่ตรองถึงข้อผิดพลาดของตนเอง จงกระตุ้นให้พวกเขาแบ่งปันข้อผิดพลาดและกระบวนการดังกล่าวกับเพื่อนนักเรียน ด้วยวิธีนี้ นักเรียนสามารถกลายเป็น “แหล่งเรียนรู้สำหรับกันและกัน” ได้4
- ขอให้นักเรียนคิดถึงข้อผิดพลาดที่พวกเขาทำและเอาชนะในระหว่างกระบวนการ
ช่วยให้นักเรียนก้าวข้ามการคาดเดาและตรวจสอบ - ในตอนแรกนักเรียนจะคาดเดาและตรวจสอบเพื่อทดลองกับบล็อกต่างๆ ในโปรเจ็กต์ของพวกเขา แต่คุณจะต้องการให้พวกเขาเริ่มทำการเลือกตามเป้าหมายของโปรเจ็กต์ ขอให้ผู้เรียนอธิบายเป้าหมายของโครงการให้คุณฟัง จากนั้นถามว่าสิ่งใดในโครงการที่กำลังดำเนินการเพื่อบรรลุเป้าหมายนั้น สิ่งที่ยังขาดอยู่ และทำไม การสนับสนุนให้ผู้เรียนสร้างโครงการจากระดับแนวคิดเกี่ยวกับสิ่งที่พวกเขาต้องการให้หุ่นยนต์ทำ และเหตุผลที่ทำ จะช่วยให้ผู้เรียนก้าวข้ามการคาดเดาและตรวจสอบ และเริ่มเขียนโค้ดด้วยความตั้งใจ
ห้องปฏิบัติการ 3 และ 4 ของหน่วยนี้ประกอบด้วยกิจกรรมที่ออกแบบมาเพื่อเป็นการสำรวจ และจะขอให้ผู้เรียนของคุณอดทนเพื่อแก้ไขความท้าทาย นักเรียนจะต้องเปลี่ยนพารามิเตอร์ในบล็อก Drivetrain และสร้างบล็อกของฉันเพื่อรวบรวมและกระจายดิสก์ไปยังพื้นที่ต่างๆ ตามสี อาจต้องทำการทำซ้ำโครงการหลายรอบเพื่อรวบรวมและจัดเรียงดิสก์ ใช้ข้อเสนอแนะที่ระบุไว้ในส่วนนี้เพื่อเตรียมนักเรียนสำหรับกระบวนการลองผิดลองถูก และช่วยให้พวกเขาแก้ไขปัญหาโครงการของตนเพื่อบรรลุเป้าหมายของความท้าทายนั้น ส่วนการอำนวยความสะดวกของการเล่นส่วนที่ 1 และ 2 มีการสนับสนุนการเรียนการสอนเพิ่มเติมเพื่อแนะนำนักเรียนผ่านความท้าทายในห้องปฏิบัติการเหล่านี้ การมีแผนว่าคุณจะให้การสนับสนุนการแก้ปัญหาและการลองผิดลองถูกที่จำเป็นในห้องปฏิบัติการนี้อย่างไรสามารถช่วยให้คุณตอบสนองความต้องการเฉพาะตัวของนักเรียนของคุณได้
See the Building Resilience in STEM Labs VEX Library article for more information on how effective feedback can help students build resilience and a growth mindset while working through STEM Labs.
1 NASA, Mars 2020 Mission Overview, https://mars.nasa.gov/mars2020/mission/overview/, 2021.
2 Hattie, John, and Shirley Clarke. การเรียนรู้ที่มองเห็นได้: ข้อเสนอแนะ Routledge, Taylor & Francis Group, 2019.
3 Ibid.
4 Ibid, หน้า 121