Remix Challenges: Clawbot Control - C++
![]() Teacher Toolbox
-
Before the First Activity
Teacher Toolbox
-
Before the First Activity
-
Place students in groups of 2 or 4 students. One student should be designated as the Driver - the student using the controller to drive the Clawbot.
-
Objects can be any classroom material/object you have handy (eraser, roll of tape, tissue box) and can be distributed to student groups at the beginning of this activity. Each group will need just one object for the first activity, "Grab an Object!" and three objects for the other two activities.
-
If time permits in any of the Remix Activities, have students take turns as the Driver.
-
The Driver should be able to complete the following steps:
-
Using the R2 button, open the Claw.
-
Using the Joysticks, move your Clawbot so your object is positioned inside the open Claw.
-
Using the R1 button, close the Claw.
-
To release the object, open the Claw once again by using the R2 button.
-
Grab an object!
The goal of this activity is to grab and release an object with the Clawbot using the Controller.
Here are some steps to guide your group:
- Place your group’s object on the floor and make sure your Clawbot has enough space to move without interfering with other groups.
- List the steps the Clawbot will need to grab the object. Be sure to include which buttons you’ll use to accomplish this task!
- Write the steps the Driver lists in the engineering notebook.
-
Click the Download button in the Toolbar to download the Clawbot Control project to the Robot Brain.
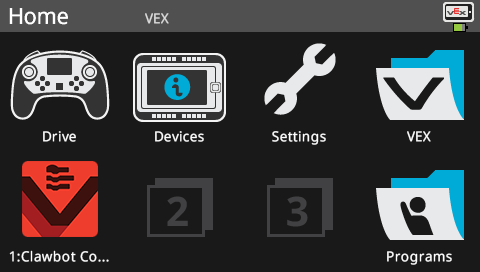
- Check to make sure your project has downloaded to the Clawbot’s Brain by looking at the Robot Brain’s screen. The project name, Clawbot Control, should be listed in slot 1.
- Run the project on the Clawbot.
- Grab and release an object with the Clawbot using the Controller.
Congratulations! You have grabbed an object with your Clawbot using the Controller!
Were there any differences between your predictions and the actions you took during the activity? If so, add them to your engineering notebook.
![]() Teacher Toolbox
-
Before the Second Activity
Teacher Toolbox
-
Before the Second Activity
-
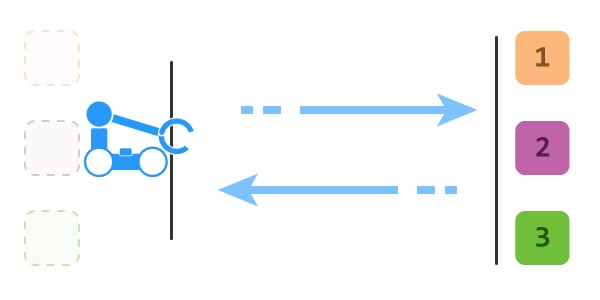
Before the second activity (colored gems) begins, have each group line their Clawbots up on one side of the room. Mark this starting location with an object or a line of tape on the floor. On the opposite side of the room, determine an object retrieval area by placing an object on the floor that is equidistant from each group’s home base locations. This can be a classroom object or even a line of tape across the floor. Instruct the groups that they must place all three of their objects in the retrieval area behind the point or line you’ve established. This way, each group has to move their Clawbot the same distance to accomplish the required task and ensure fairness.
-
For a more complex challenge, have the students return the objects to home base and stack them. The group that completes their stack first wins.
Colored Gems
The goal of this activity is to use your Clawbot skills to collect several objects, one at a time, and return them to a location faster than the other groups in your class. Good luck!
Here are some steps to guide your team:
- Move your group’s objects behind the object retrieval area your teacher has established, and make sure your Clawbot has space to move without interfering with other groups.
- List the steps the Clawbot will need to grab each object and return them to home base. Be sure to include which buttons you’ll use to accomplish this task!
- Write the steps the Driver lists in the engineering notebook.
- Using the classroom clock or a watch, keep time and record it in your engineering notebook.
- Retrieve each object as quickly as you can.
Congratulations! You have collected all three of your group’s objects, returned them to home base with your Clawbot using the Controller!
![]() Teacher Toolbox
-
Before the Third Activity
Teacher Toolbox
-
Before the Third Activity
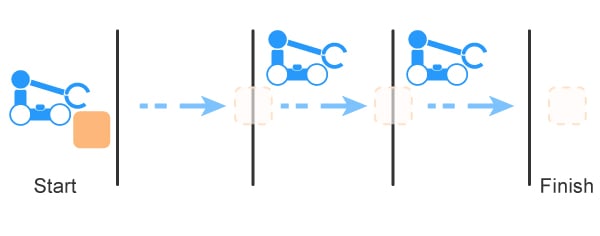
Before the third activity (Relay Race!) begins, ensure students are still in their small groups of 2 or 4 students. The objective is to carry an object over a three meter course. One person in the group will pick up the object using the Clawbot and drive forward to carry it for one meter. They will then drop the object. The next person in the group will pick up the object and carry it for the second leg, where they will also then drop the object. The third person in the group will finish the relay race by carrying the object for the third leg and dropping it across the finish line.
Ask one of the members in the group to monitor the time. This person should also ensure the Clawbot does not obstruct any other drivers or students and checks that the robot places the object far enough over the line.
If time allows, play the challenge more than once to ensure all group members have a chance to drive the robot.
Relay Race!
The goal of this activity is to use your Clawbot and teamwork skills in a relay race. The group will be responsible for moving an object across a three meter course in the fastest time possible.
Player 1: Pick the object and carry it to the one meter line. Drop the object.
Player 2: Pick up the object and carry from the one to the two meter line. Drop the object.
Player 3: Pick up the object and carry from the two meter line to the finish line. Drop the object in the goal area.
Player 4: Monitor the time and ensure the Clawbot does not obstruct any other drivers or students. Ensure the robot places the object far enough over the line.