
Event-Based Programming: Communication Among Blocks
![]() Teacher Toolbox
Teacher Toolbox
The goal of the Rethink section is for students to use buttons on the Controller using event-based programming.
This section includes:
-
Event-Based Programming Overview
-
Example Project Download Instructions & Overview
-
Remix Activities:
-
Grab an Object!
-
Colored Gems
-
Relay Race!
-
-
Remix Questions
![]() Teacher Tips
Teacher Tips
- The Controller can be paired with the Robot Brain before class to save time. Decide whether you want to complete this step or if you would like students to do so. Follow the steps here. You can have this article printed out for students to use, if you want them to pair the Controller to the Brain.
- Event-based programming gives the Clawbot the ability to trigger events or react to triggers. This type of programming enables one block to communicate with other blocks.
In other words, the Clawbot responds to the movements of the Controller’s Joysticks. The movement of the Joystick is the trigger, and the Clawbot responds accordingly
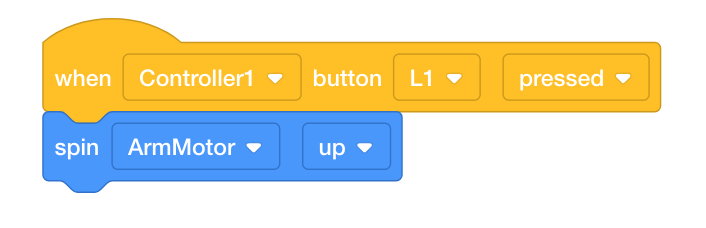
In the above example, pressing the L 1button is the trigger that spins the ArmMotor up. The [when controller button] block communicates that message to the [spin] block.
To learn more about the blocks, open the Help information.

Event-based programming
If your dog brings you his leash or sits by the door, he’s letting you know that he needs to go outside. In school, when your teacher asks a question and sees you raise your hand, they believe you know the answer and would like to answer the question. These behaviors are also known as “triggers.”
Your dog knows that bringing you his leash or sitting by the door is the trigger that lets you know he needs to go outside. So, when you see him sitting by the door with his leash, you react to the trigger by taking him outside. Raising your hand is the trigger that lets the teacher know you would like to answer the question. The teacher then reacts to the trigger by calling upon you.
Event-based programming in robotics is when certain robot behaviors trigger the robot to do certain things or react to certain triggers.
![]() Teacher Toolbox
-
Reviewing the Blocks
Teacher Toolbox
-
Reviewing the Blocks
- Ask students to open the Clawbot Controller with Events example project in VEXcode V5.

- As a whole class activity, review the programming blocks with the students. Tell the students that multiple events within the Clawbot Control project can be triggered at the same time, enabling them to control the Clawbot’s driving movement as well as the movement of the Clawbot’s Arm and Claw.
- If students need a quick review of VEXcode V5, they can reference the Tutorials at any time during this investigation. The Tutorials are located in the toolbar. Students can review saving, downloading and running a project, along with other items, with the tutorials.

Controller: Clawbot Control
Now, you’re ready to download the Clawbot Controller with Events example project and use the Controller to operate the Clawbot, its Arm, and its Claw, all at the same time!

Ensure you have the hardware required and your engineering notebook. Open VEXcode V5.
| Quantity | Materials Needed |
|---|---|
| 1 |
Clawbot |
| 1 |
Charged Robot Battery |
| 1 |
VEX V5 Radio |
| 1 |
Controller |
| 1 |
Tether Cable |
| 1 |
VEXcode V5 |
| 1 |
USB Cable (if using a computer) |
| 1 |
Engineering Notebook |
Before you begin the activity...
Do you have each of these items ready? The Builder should check each of the following:
-
Are all the motors and sensors plugged into the correct port?
-
Are the smart cables fully inserted into all of the motors?
-
Is the battery fully charged?
-
Is the Controller paired with the Robot Brain?