
Exploring Center of Gravity with the Robot
| Quantity | Materials Needed |
|---|---|
| 2 |
VEX V5 Classroom Starter Kits (with up-to-date firmware) |
| 1 |
Roll of Tape |
| 1 |
Materials to make a Small Ramp (wood, cardboard, binders, etc.) |
| 1 |
Meter Stick |
| 1 |
Engineering Notebook |
Step 1: Clearing a Space
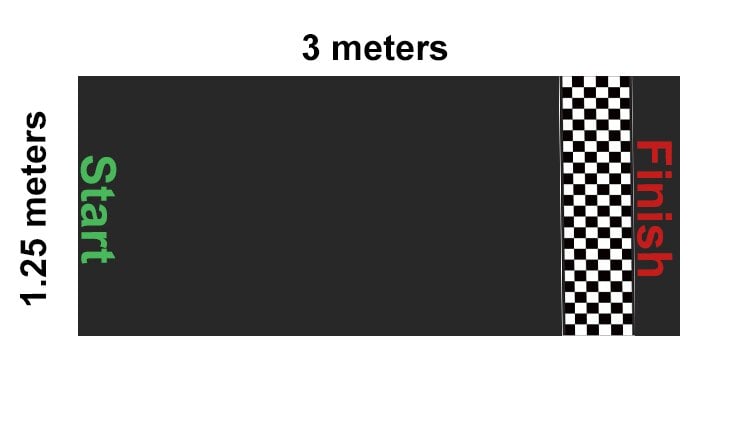
The first step in creating a course for your V5 Clawbot is to clear a space on the floor approximately 3 meters (119 inches) by 1.25 meters (49 inches). This will be the racing track and allow two Clawbots to race side-by-side at the same time. Mark the space with tape or in some way so that the track is clearly marked with starting and finishing lines.
![]() Teacher Tips
Teacher Tips
-
Locate a space that is 3 meters (119 inches) by 1.25 meters (49 inches). The track and ramp can be scaled down in cases where there is limited space, but the width of the track needs to be wide enough to accommodate two V5 Clawbots racing at the same time.
-
Promote the conscious development of cooperative learning skills by reviewing the Strategy and Teamwork (Google / .docx / .pdf) tips with students.
-
Gather materials for building the ramp in advance. There are recommended materials in the hardware/software section, but anything from three-ringed binders to plywood will suffice.
Step 2: Building a Ramp
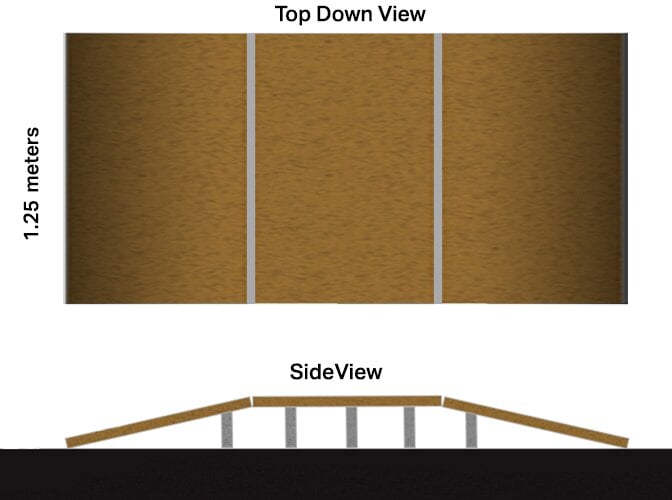
The next step is to build a ramp that is as wide as the course (approx. 1.25 meters or 49 inches). The ramp could be constructed using wood, cardboard, or anything available that is strong enough to hold the weight of the two V5 Clawbots. The ramp should have two slopes, first upward and then downward, and should be sloped gradually so that there aren't gaps at either end of it.
Step 3: Positioning the Ramp
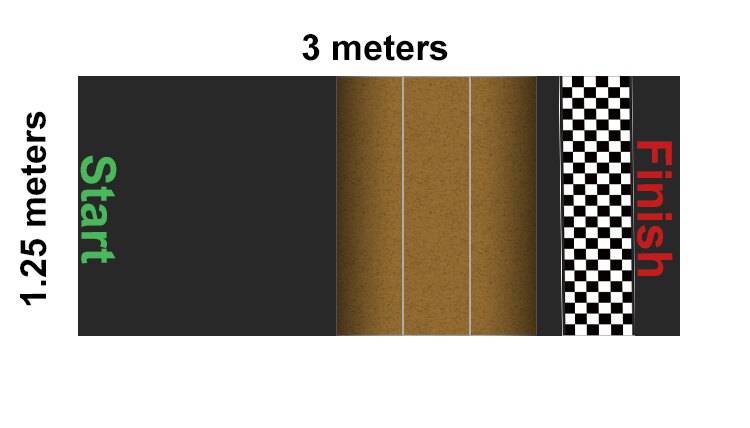
Move the ramp to the second half of the course. The ramp should be at least 1.5 meters (59 inches) from the starting line. Make sure the ramp is positioned so that its sides are precisely parallel to the sides of the track. In other words, make sure that the ramp is not crooked so that the V5 Clawbot's front wheels can reach the ramp at exactly the same time.
Step 4: Preparing the Robot

Power on the V5 Robot Brain, make sure it is paired with the V5 Controller, and run the Drive program on the V5 Robot Brain so that you’re able to wirelessly drive your robot with the V5 Controller.
Step 5: Running with a Resting Arm
The V5 Clawbots should have their arms all the way down in the starting or resting position.
![]() Teacher Tips
Teacher Tips
-
Check that the arm of each V5 Clawbot is lowered to the starting or resting position.
-
Group teams into pairs. During the first round, each pair will race the V5 Clawbots against each other.
-
Utilize a round robin bracket if there is an uneven number of teams.
-
Rotate the pairs after each round, if you have four or more teams. Ensure that the two fastest teams face each other in the next round, then the next two fastest, and so on.
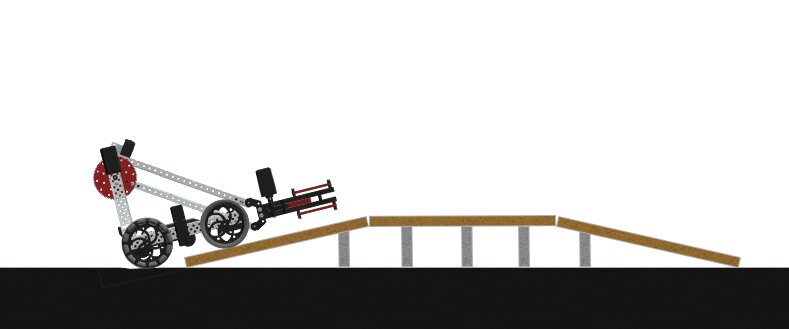
Step 6: Running with an Angled Arm
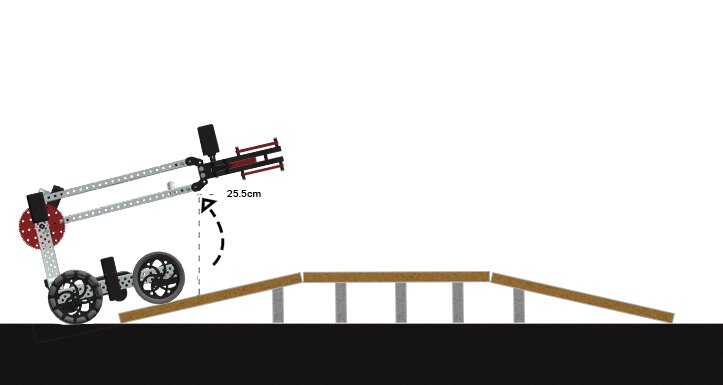
During the second round, the new pairs will race their Clawbots again head-to-head.
In this round, each Clawbot's arm must be raised at least 25.5 centimeters (approx. 10 inches) above its starting position.
![]() Teacher Tips
Teacher Tips
-
Check the position of each arm prior to each race to ensure the arm is properly positioned.
-
Notify students that the V5 Clawbot is prone to tipping when the claw arm is lifted (especially if the arm is raised and the claw is holding an object).
Step 7: Running with a Near-vertical Arm
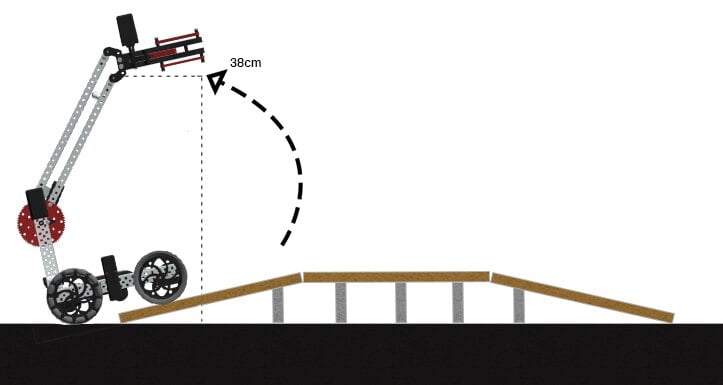
During the third round, the V5 Clawbots' arms must be raised 38 centimeters (approx. 15 inches) above its starting position.
If you have just two teams, the team who wins Round 3's matchup is the winner of the challenge.
![]() Teacher Tips
Teacher Tips
-
Check the position of each arm prior to each race to ensure the arm is properly positioned.
-
Allow the winners of each matchup to continue to face off in another Round 3 match, until one team emerges as the overall winner.
-
Notify students that the V5 Clawbot is prone to tipping when the claw arm is lifted (especially if the arm is raised and the claw is holding an object).