Bài 2: Tóm tắt sau dự án
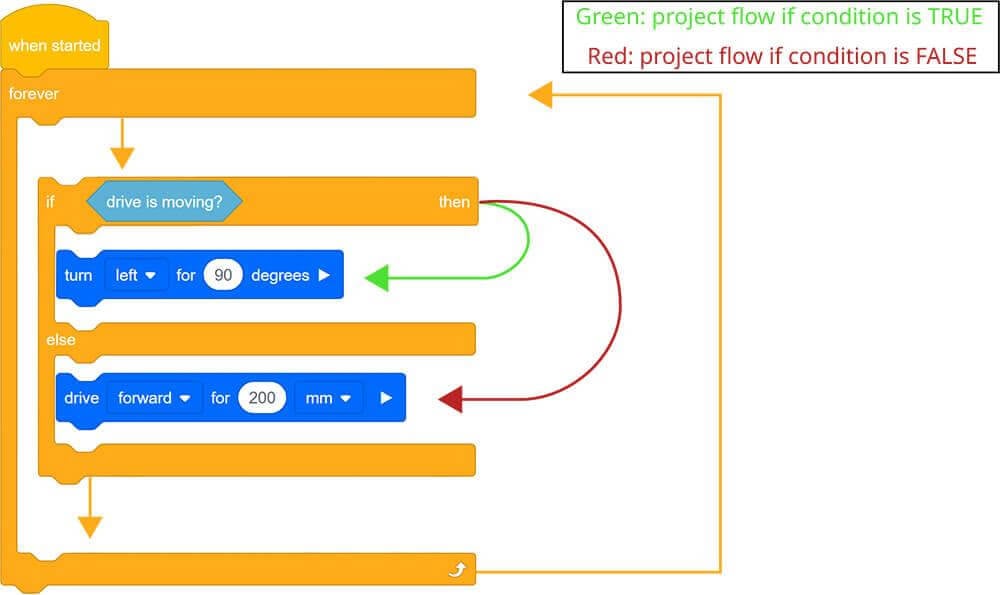
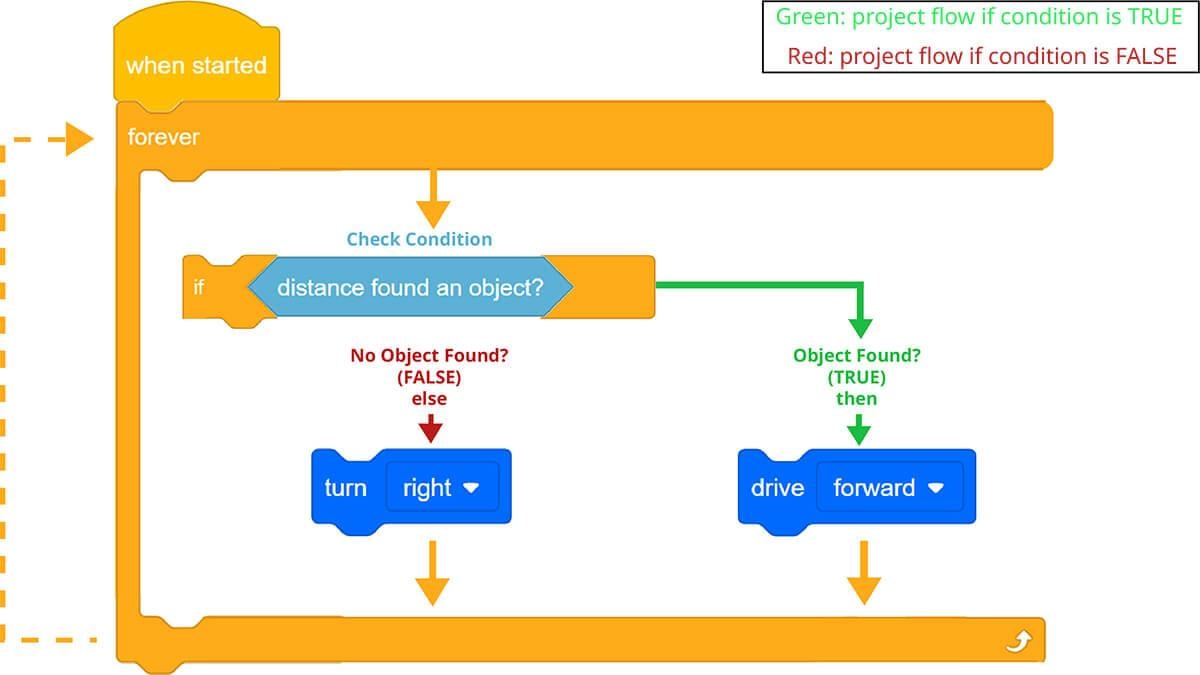
Khối [Nếu thì khác] được sử dụng để Robot VR có thể đưa ra quyết định. Nếu điều kiện Boolean là ĐÚNG, thì các khối bên trong nhánh 'Nếu Thì' sẽ chạy. Nếu Điều kiện Boolean là SAI, thì các khối bên trong nhánh 'Else' sẽ chạy.
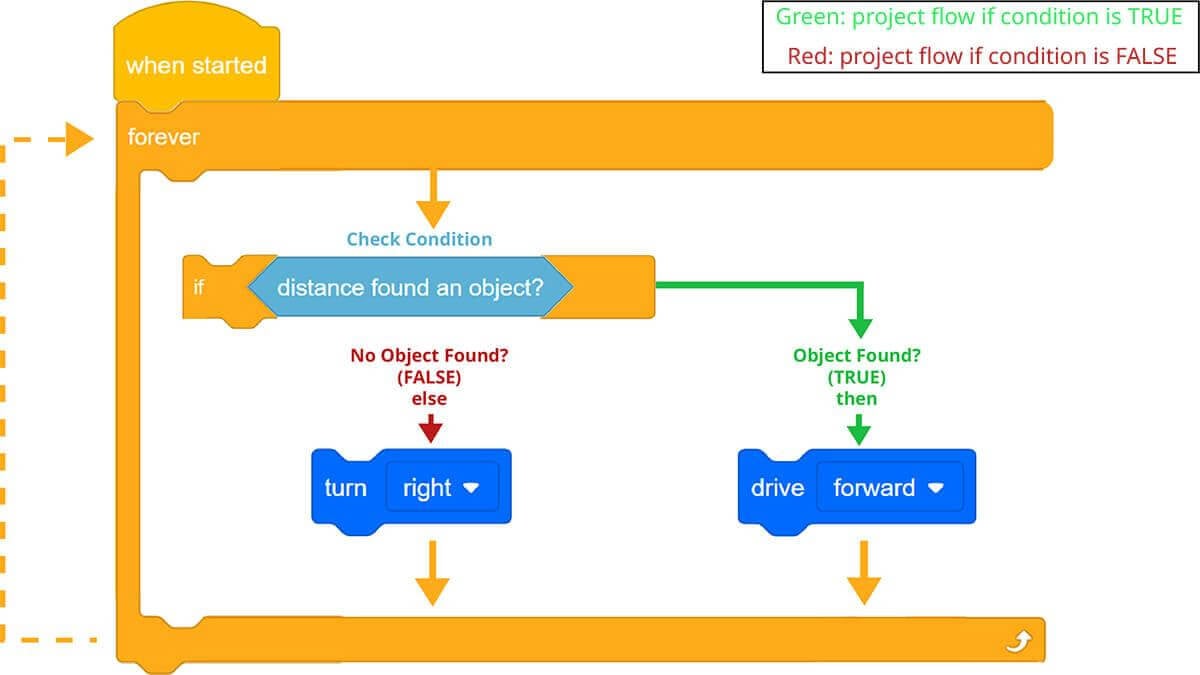
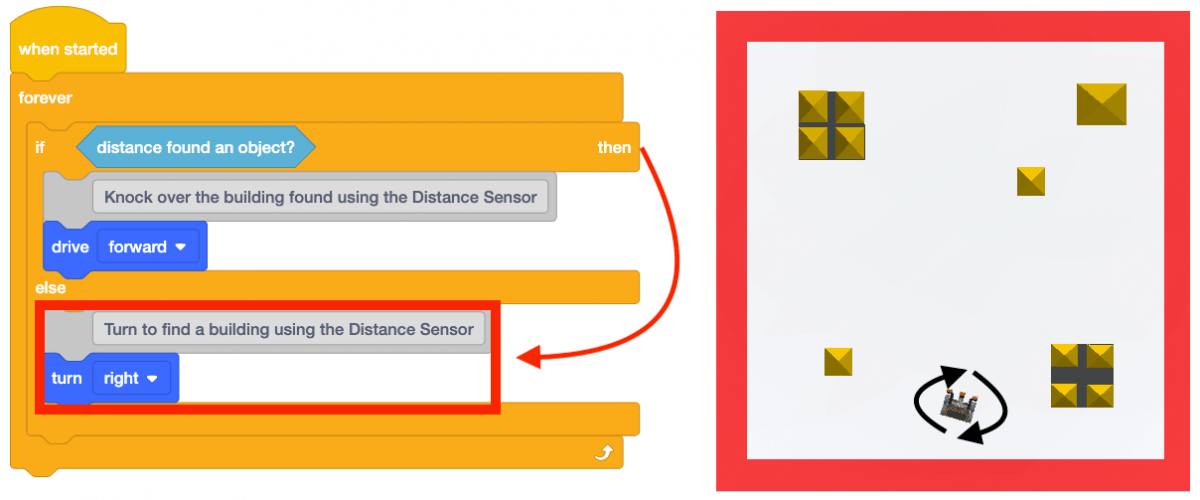
Trong dự án này, Robot VR sẽ di chuyển về phía một tòa nhà khi Cảm biến khoảng cách phát hiện ra một vật thể và khối <Distance found object> được báo cáo là ĐÚNG. Lệnh này sẽ hướng dẫn nhánh 'Nếu thì' của dự án chạy. Nhánh này bao gồm khối [Ổ đĩa]. Sau đó, VR Robot sẽ bỏ qua nhánh 'Khác' của dự án.
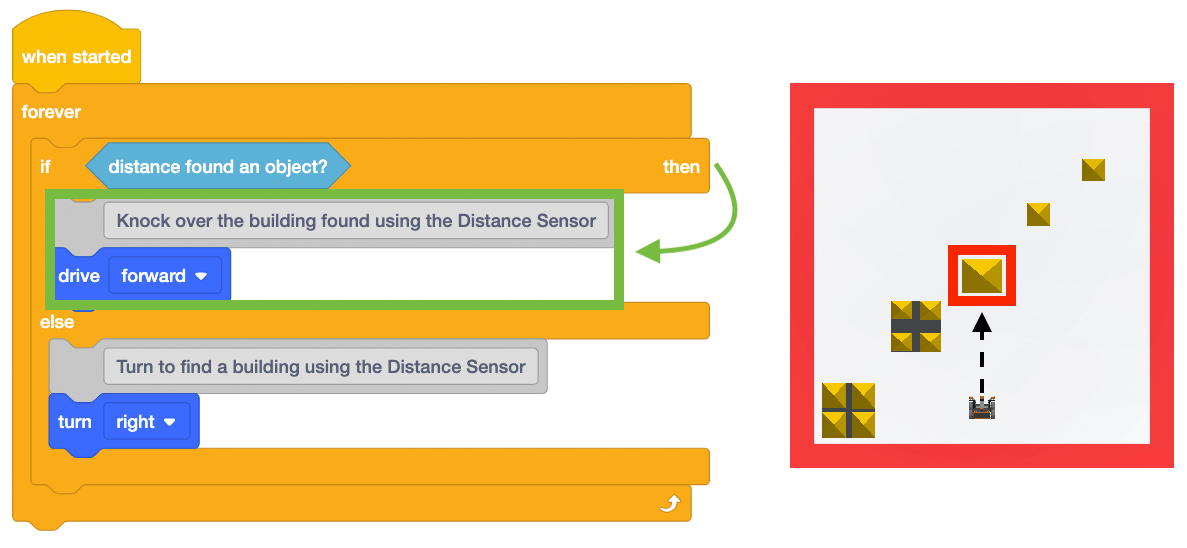
Vì khối [Nếu thì else] được đặt bên trong khối [Mãi mãi], nên dự án sẽ lặp lại đến đầu khối [Mãi mãi] để kiểm tra tình trạng của khối [Nếu thì else]. Vòng lặp này sẽ tiếp tục mãi mãi, hướng dẫn Robot VR liên tục kiểm tra điều kiện [Nếu thì khác] hàng trăm lần mỗi giây.
Lưu ý rằng các khối [Lái xe] và [Quay] bên trong khối [Nếu thì khác] là các khối không chờ. Các khối không chờ sẽ không dừng luồng của một dự án trong khi chúng đang chạy. Hành vi không chờ đợi được thực hiện trong khối [If then else] (chẳng hạn như tiến về phía trước nếu phát hiện thấy đối tượng) sẽ tiếp tục trong khi điều kiện được kiểm tra và chỉ thay đổi khi điều kiện thay đổi.
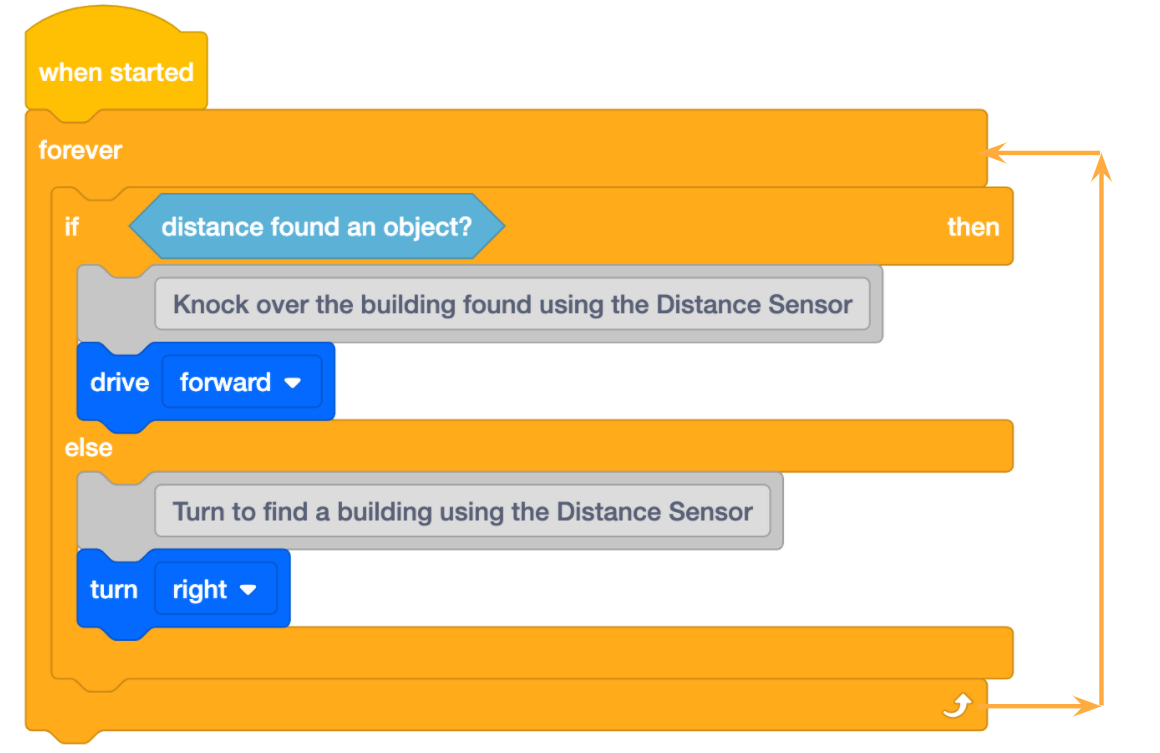
Nếu khối <Distance found object> báo cáo là SAI, nhánh 'Else' của dự án sẽ được thực thi. Nhánh 'Else' bao gồm khối [Turn].
Để bạn biết
Các khối [Nếu thì khác] được sử dụng để đảm bảo rằng chỉ có một nhánh trong dự án được chạy khi điều kiện được kiểm tra. Chỉ có một trường hợp hoặc điều kiện có thể đúng tại một thời điểm. Điều này làm cho dự án hiệu quả hơn.
So sánh dự án hiện tại với dự án được tạo ở Đơn vị 7. Dự án Unit 7 sử dụng bốn khối [Nếu thì].

Khi chạy qua một dự án có nhiều khối [Nếu thì], có khả năng nhiều điều kiện sẽ báo cáo là ĐÚNG và dự án chạy qua các lệnh trong khối [Mãi mãi]. Trong dự án này, cả hai điều kiện đều có thể báo cáo là ĐÚNG trong cùng một vòng lặp [Mãi mãi]. Những xung đột như thế này có thể khiến dự án ngừng hoạt động hoặc chạy chậm hơn.
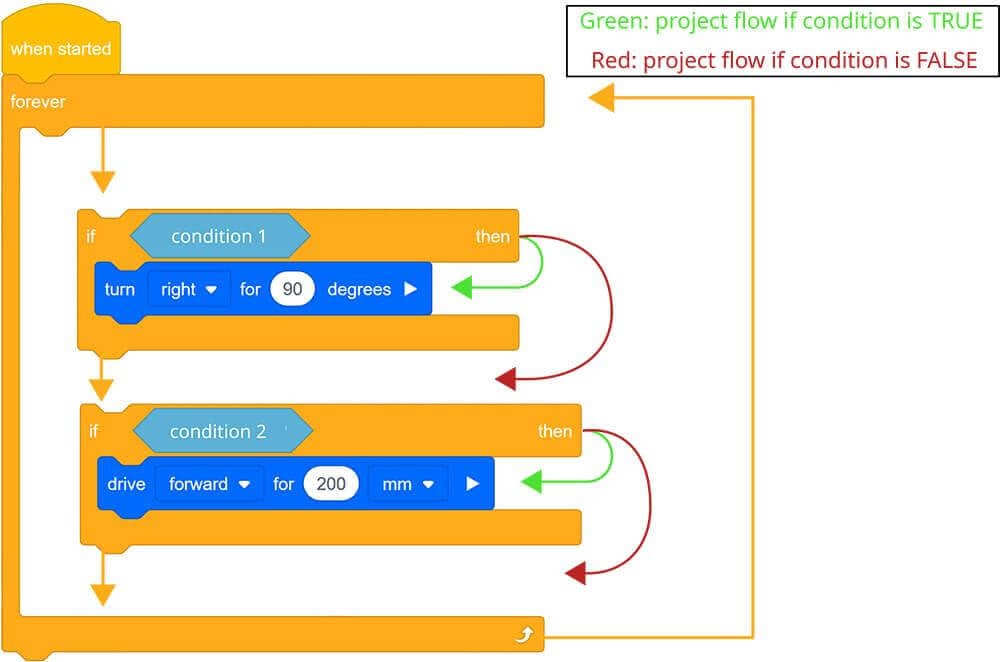
Sử dụng khối [If then else] sẽ tránh được các lỗi như thế này vì chỉ có một điều kiện có thể là ĐÚNG tại một thời điểm nhất định với khối này.