
Lección 2: Resumen posterior al proyecto
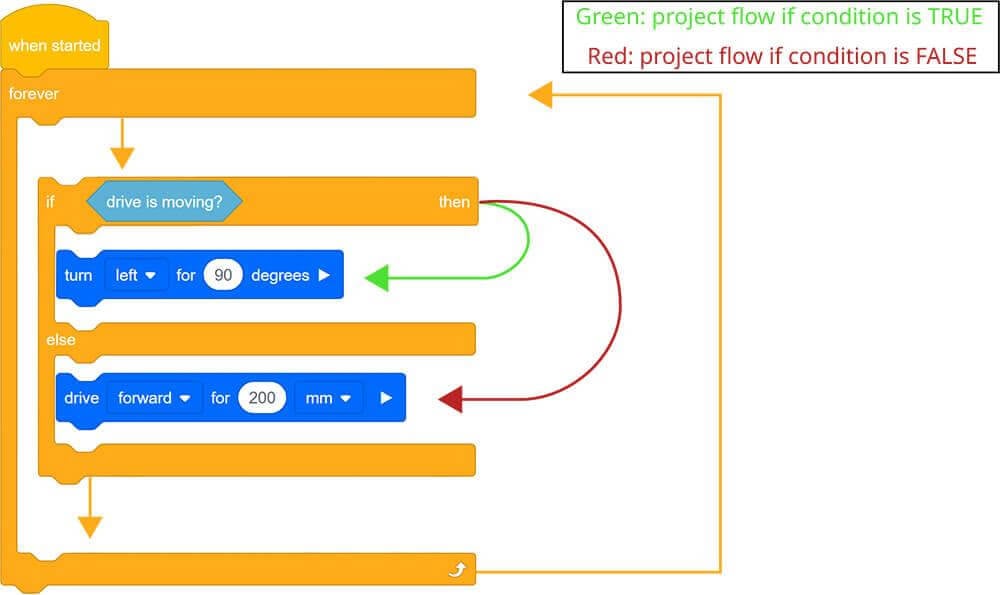
El bloque [If then else] se utiliza para que el robot VR pueda tomar una decisión. Si la condición booleana es VERDADERA, entonces se ejecutarán los bloques dentro de la rama ‘If Then’. Si la condición booleana es FALSA, se ejecutarán los bloques dentro de la rama ‘Else’.
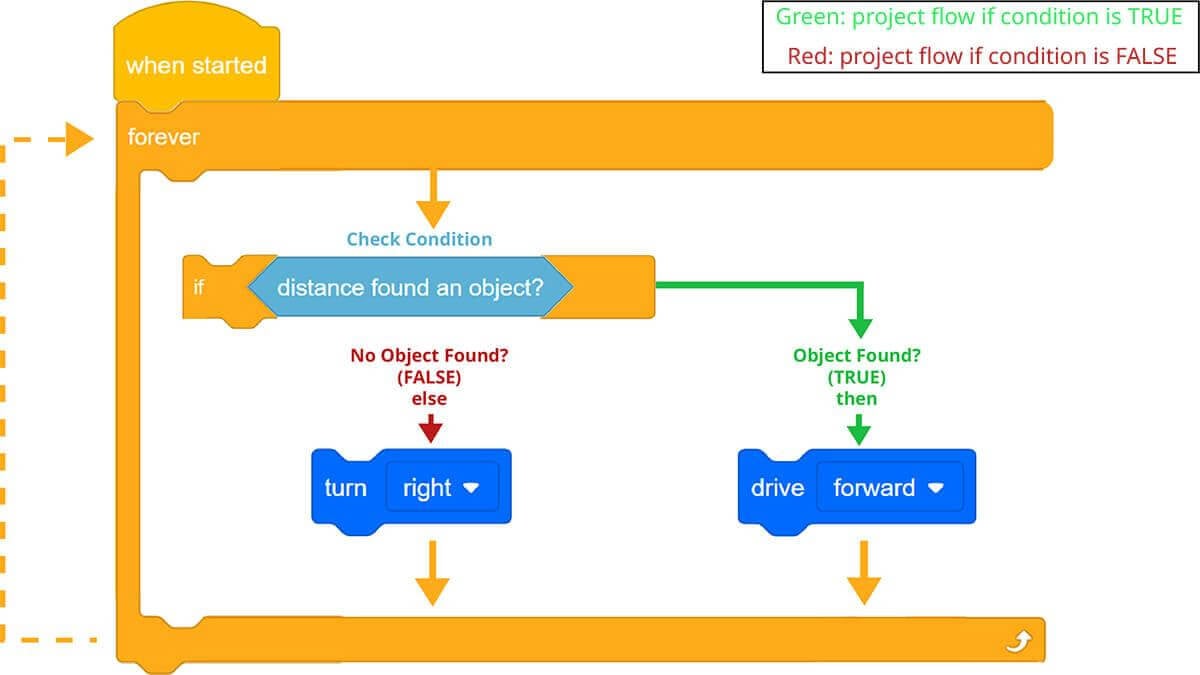
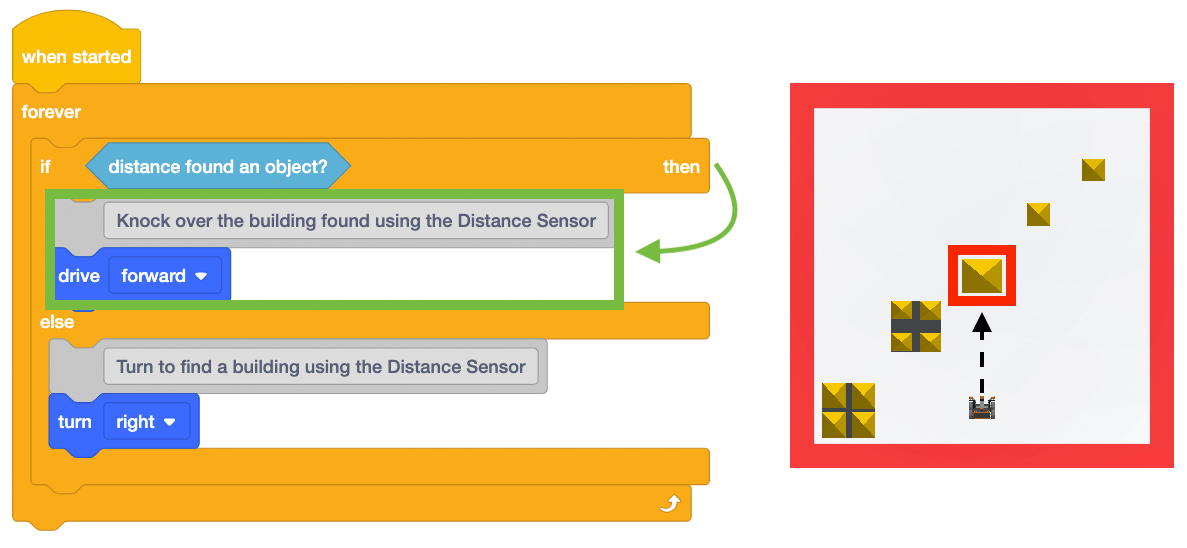
En este proyecto, el robot VR se dirigió hacia un edificio cuando el sensor de distancia detectó un objeto y el <Distance found object> bloque se informó como VERDADERO. Esto dio instrucciones a la rama ‘If Then’ del proyecto para que se ejecutara. Esta rama incluye el bloque [Drive]. El robot de realidad virtual se salta la rama ‘Else’ del proyecto.
Debido a que el bloque [If then else] se coloca dentro de un bloque [Forever], el proyecto vuelve a la parte superior del bloque [Forever] para verificar el estado del bloque [If then else]. Este bucle continuará para siempre, dando instrucciones al robot de realidad virtual para que compruebe continuamente la condición [If then else] cientos de veces por segundo.
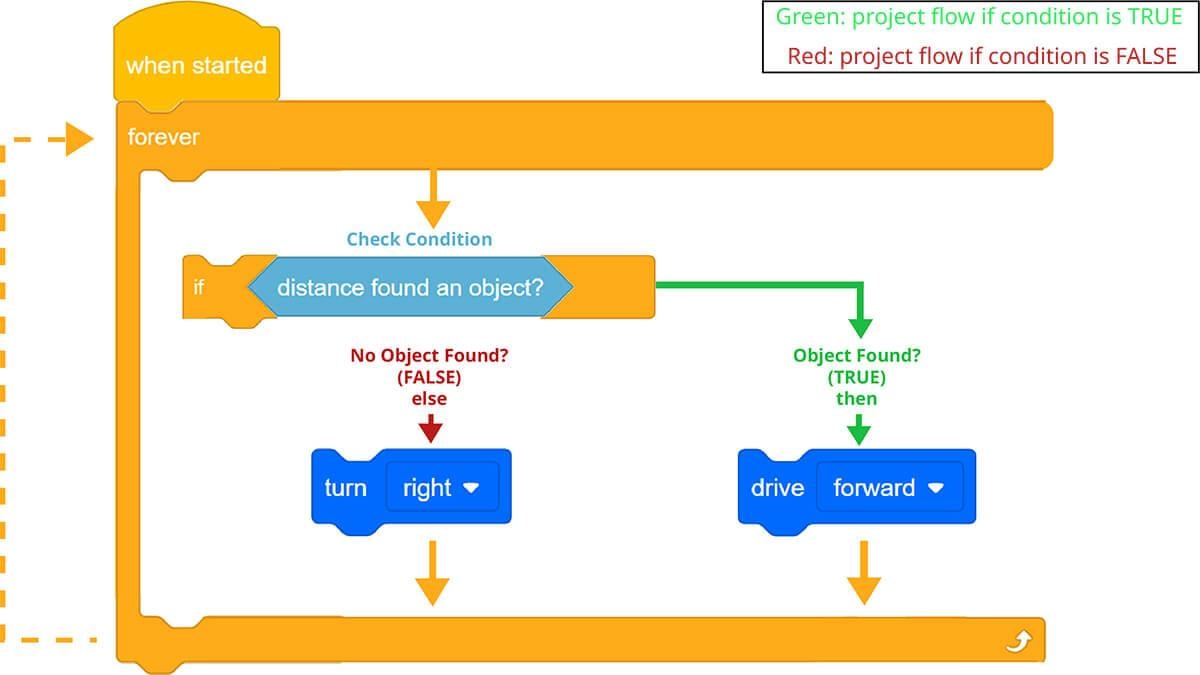
Tenga en cuenta que los bloques [Drive] y [Turn] dentro del bloque [If then else] son bloques que no están en espera. Los bloques que no están en espera no detienen el flujo de un proyecto mientras se están ejecutando. Un comportamiento de no espera que se ejecuta en un bloque [If then else] (como avanzar si se detecta un objeto) continuará mientras se comprueba la condición y solo cambiará cuando cambie la condición.

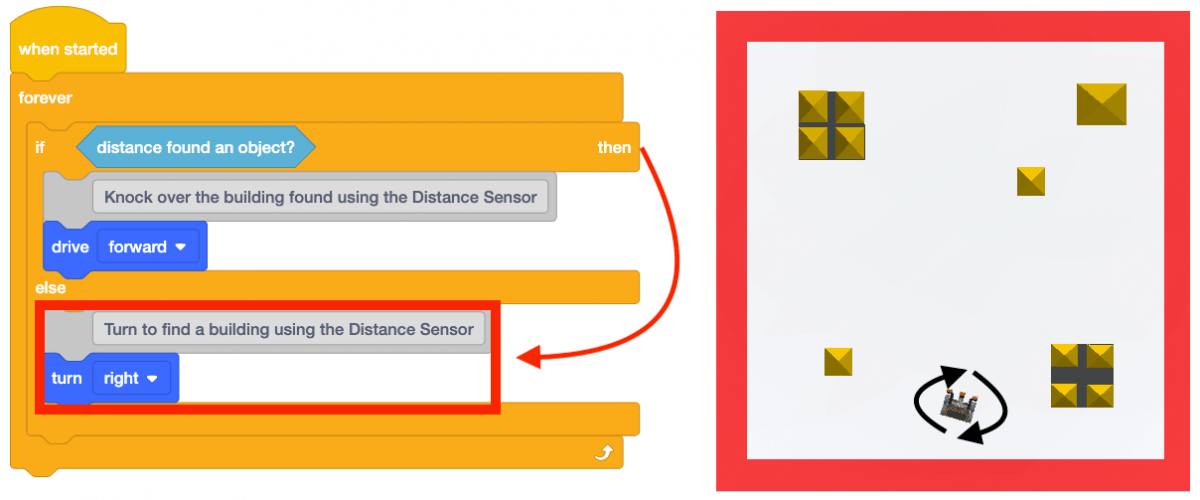
Si el <Distance found object> bloque se informa como FALSO, se ejecuta la rama ‘Else’ del proyecto. La rama ‘Else’ incluye el bloque [Turn].
Para su información
Los bloques [If then else] se utilizan para garantizar que solo se ejecute una rama en el proyecto cuando se comprueba la condición. Solo una instancia o condición puede ser verdadera en cualquier momento. Esto hace que el proyecto sea más eficiente.
Comparar el proyecto actual con el proyecto creado en la Unidad 7. El proyecto de la Unidad 7 utiliza cuatro bloques [If then].

Cuando se ejecuta un proyecto con múltiples bloques [If then], podría ser posible que múltiples condiciones informen TRUE y el proyecto se ejecute a través de los comandos en el bloque [Forever]. En este proyecto, ambas condiciones pueden ser CIERTAS durante el mismo bucle [Forever]. Conflictos como este podrían hacer que el proyecto deje de ejecutarse o se ejecute más lentamente.
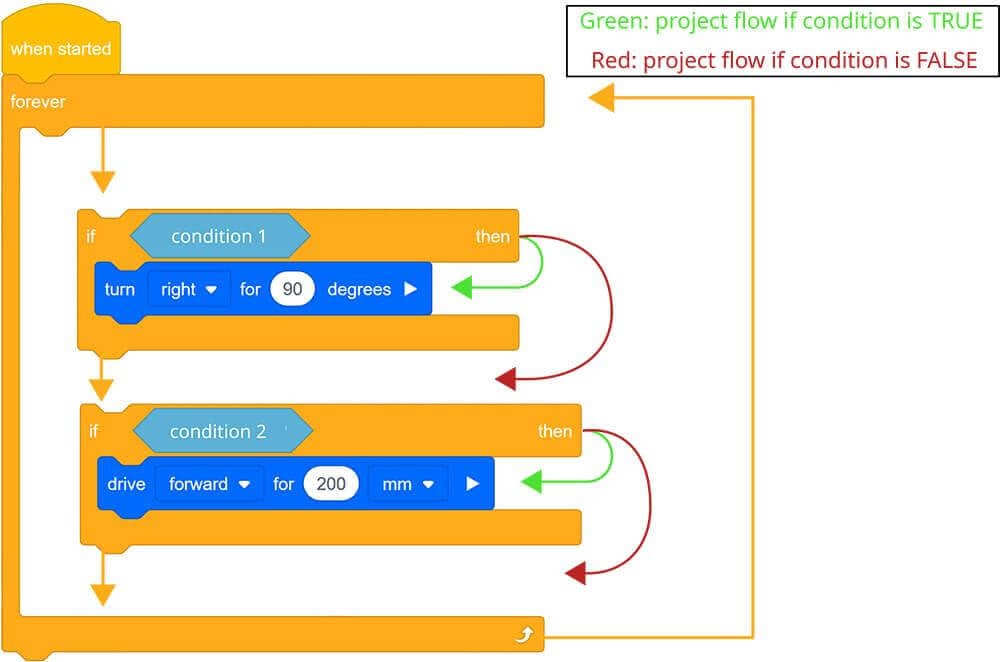
Usar un bloque [If then else] evitaría errores como este porque solo una condición puede ser VERDADERA en un momento dado con este bloque.
Preguntas
Seleccione un enlace a continuación para acceder al cuestionario de la lección.
Google Doc / .docx / .pdf