บทที่ 2: สรุปหลังโครงการ
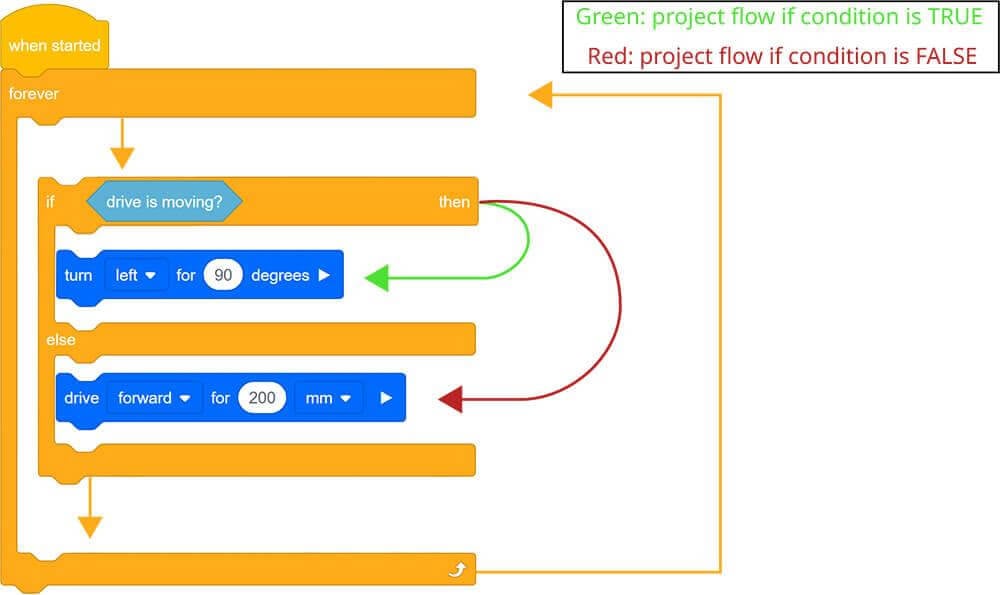
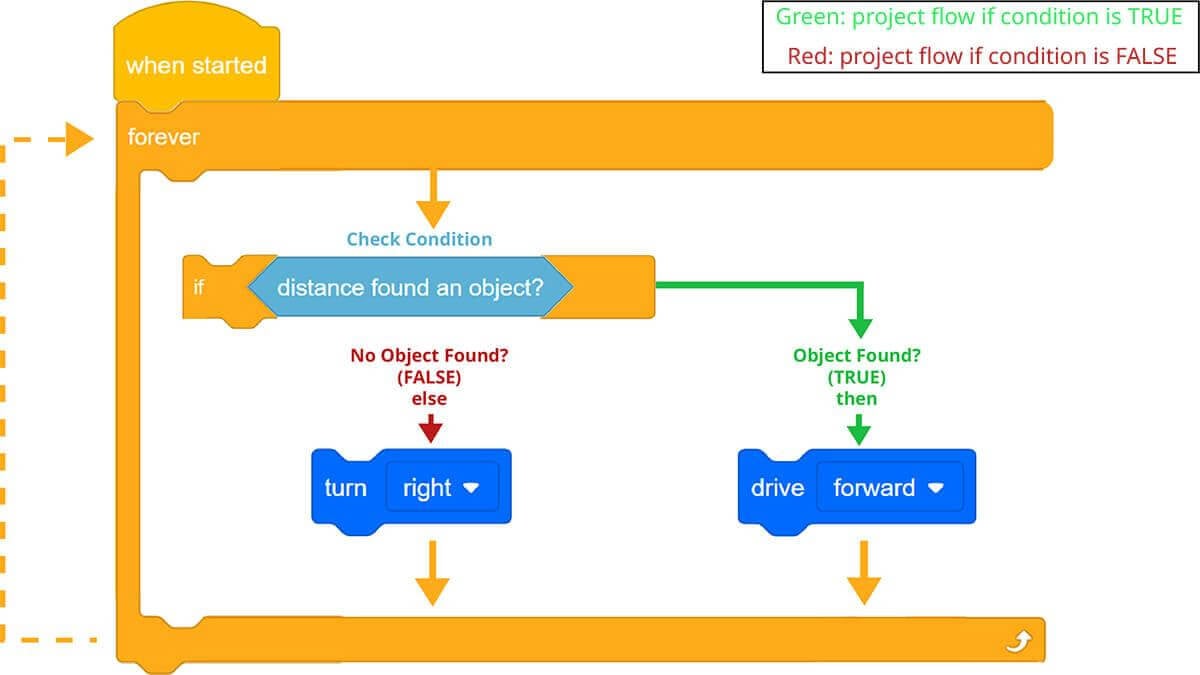
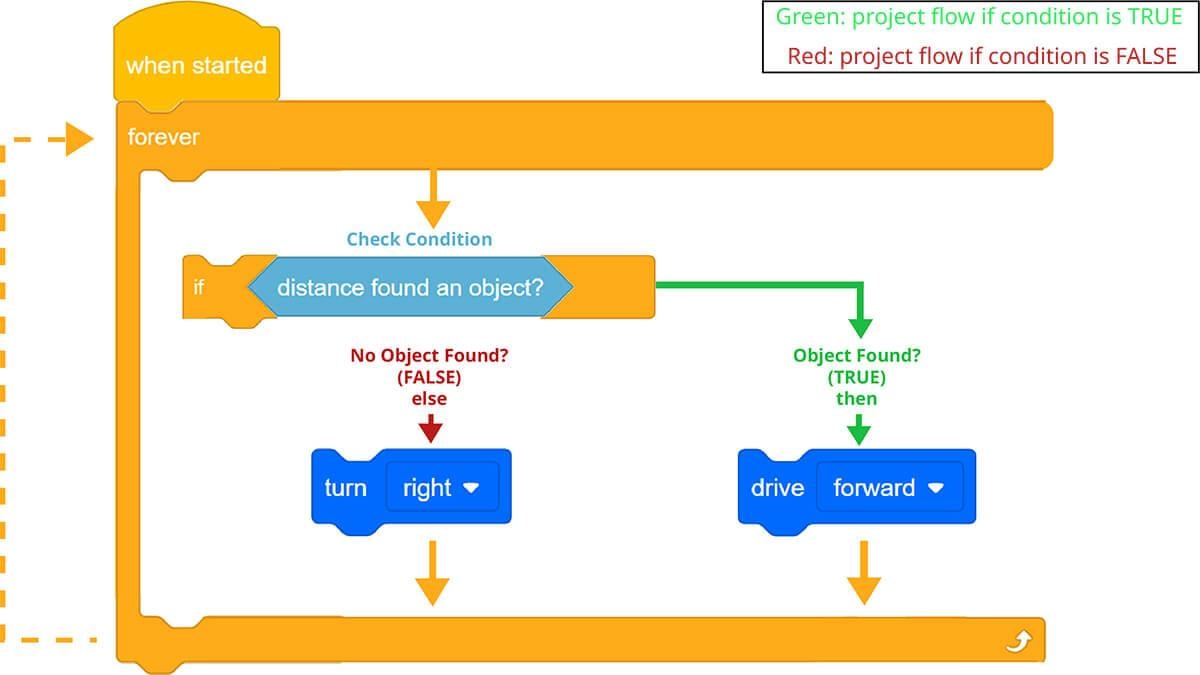
บล็อก [ถ้าเป็นเช่นนั้น] ถูกใช้เพื่อให้หุ่นยนต์ VR สามารถตัดสินใจได้ หากเงื่อนไขบูลีนเป็นจริงบล็อกภายในสาขา ‘ถ้าเป็นเช่นนั้น’ จะทำงาน หากเงื่อนไขบูลีนเป็นเท็จบล็อกภายในสาขา ‘อื่นๆ’ จะทำงาน
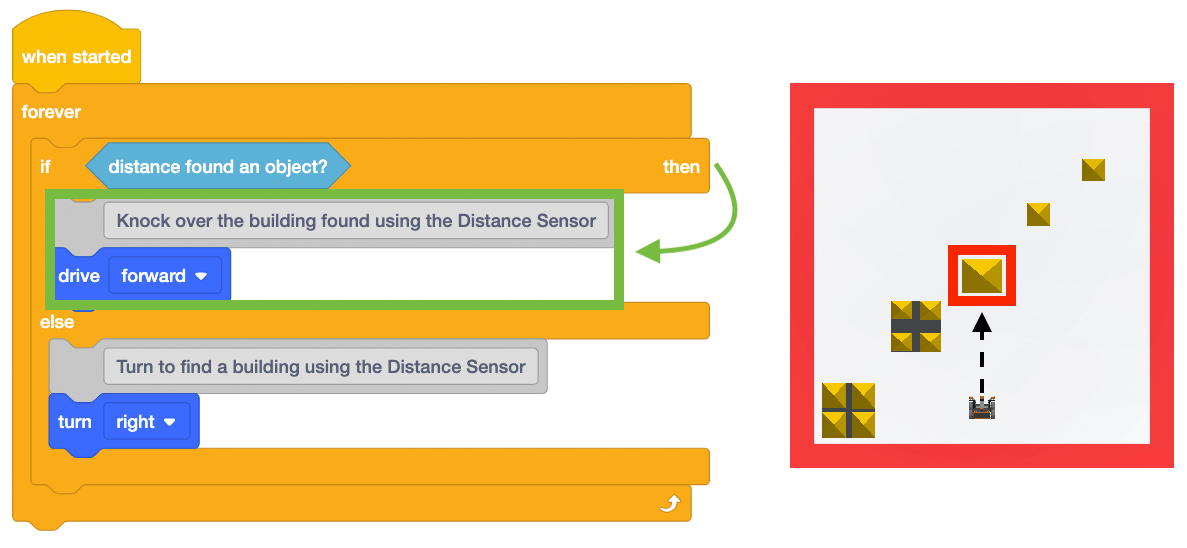
ในโครงการนี้หุ่นยนต์ VR ขับรถไปที่อาคารเมื่อเซ็นเซอร์ระยะทางตรวจพบวัตถุและ <Distance found object> บล็อกรายงานว่าเป็นจริง สิ่งนี้สั่งให้สาขา ‘If Then’ ของโครงการทำงาน สาขานี้รวมบล็อก [Drive] ด้วย จากนั้นหุ่นยนต์ VR จะข้ามสาขา ‘อื่นๆ’ ของโครงการ
เนื่องจากบล็อก [If then else] ถูกวางไว้ภายในบล็อก [Forever] โปรเจกต์จึงวนกลับไปที่ด้านบนของบล็อก [Forever] เพื่อตรวจสอบสภาพของบล็อก [If then else] ลูปนี้จะดำเนินต่อไปตลอดไปโดยสั่งให้หุ่นยนต์ VR ตรวจสอบสภาพ [ถ้าเป็นเช่นนั้น] อย่างต่อเนื่องหลายร้อยครั้งต่อวินาที
โปรดทราบว่าบล็อก [Drive] และ [Turn] ภายในบล็อก [If then else] เป็นบล็อกที่ไม่ต้องรอ บล็อกที่ไม่ต้องรอจะไม่หยุดการไหลของโครงการในขณะที่กำลังทำงานพฤติกรรม ที่ไม่ใช่การรอที่ดำเนินการในบล็อก [ถ้าเป็นเช่นนั้น] (เช่นไดรฟ์ไปข้างหน้าหากตรวจพบวัตถุ) จะดำเนินต่อไปในขณะที่ตรวจสอบเงื่อนไขและจะเปลี่ยนก็ต่อเมื่อเงื่อนไขมีการเปลี่ยนแปลง

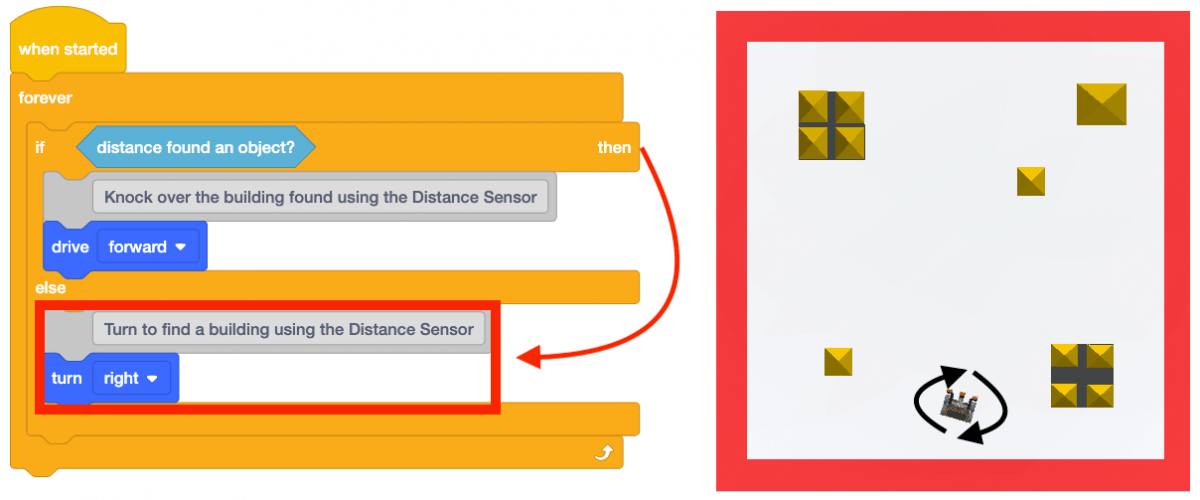
หาก <Distance found object> บล็อกรายงานเป็นเท็จสาขา ‘อื่นๆ’ ของโครงการจะดำเนินการ สาขา ‘อื่นๆ’ รวมถึงบล็อก [Turn]
สำหรับข้อมูลของคุณ
[ถ้าเป็นเช่นนั้น] บล็อกจะถูกใช้เพื่อให้แน่ใจว่ามีการดำเนินการเพียงสาขาเดียวในโครงการเมื่อมีการตรวจสอบเงื่อนไข มีเพียงหนึ่งอินสแตนซ์หรือเงื่อนไขเท่านั้นที่เป็นจริงได้ตลอดเวลา สิ่งนี้ทำให้โครงการมีประสิทธิภาพมากขึ้น
เปรียบเทียบโครงการปัจจุบันกับโครงการที่สร้างขึ้นในหน่วยที่ 7 โครงการหน่วยที่ 7 ใช้สี่ช่วงตึก [ถ้าเป็นเช่นนั้น]

เมื่อทำงานผ่านโปรเจกต์ที่มีหลายบล็อค [ถ้าเป็นเช่นนั้น] อาจเป็นไปได้ว่าหลายเงื่อนไขจะรายงานเป็นจริงและโปรเจกต์จะทำงานผ่านคำสั่งในบล็อค [Forever] ในโครงการนี้เงื่อนไขทั้งสองอาจรายงานเป็นจริงในระหว่างการวนซ้ำ [Forever] เดียวกัน ความขัดแย้งเช่นนี้อาจทำให้โครงการหยุดทำงานหรือทำงานช้าลง
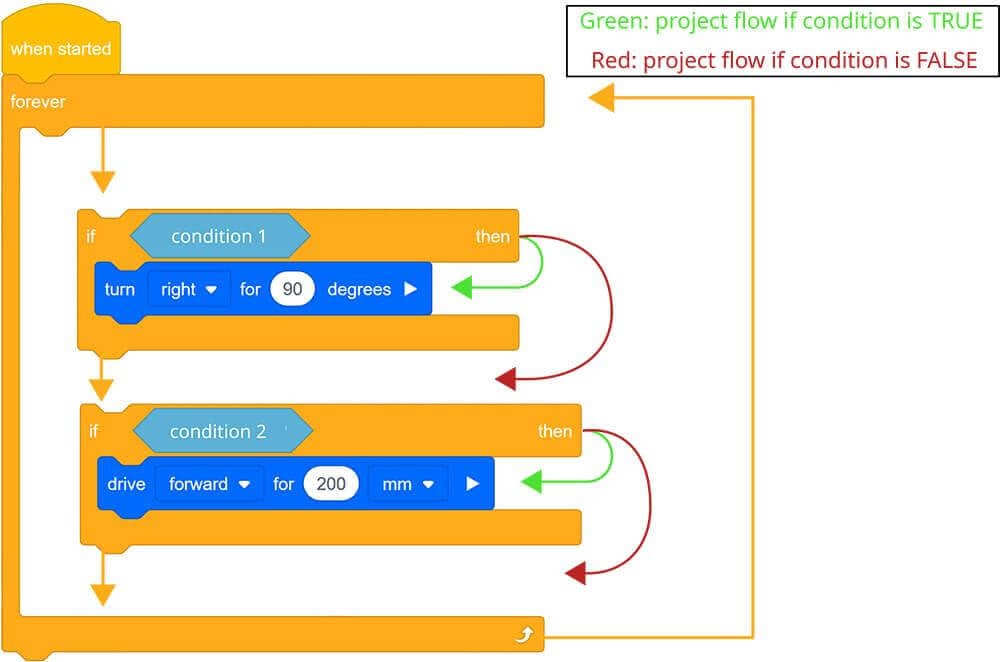
การใช้บล็อค [ถ้าเป็นอย่างนั้น] จะหลีกเลี่ยงข้อบกพร่องเช่นนี้เพราะมีเพียงเงื่อนไขเดียวเท่านั้นที่เป็นจริงได้ในช่วงเวลาที่กำหนดด้วยบล็อคนี้