
Thử thách Automed - Python
Thử thách tự động
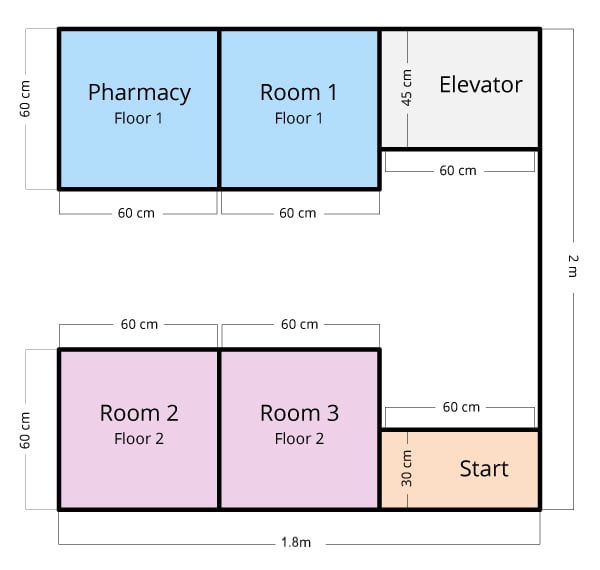
Trong thử thách này, bạn cần lập trình robot của mình để điều hướng một bệnh viện khi nó cung cấp thuốc cho bệnh nhân ở một số phòng khác nhau.
![]() Mẹo dành cho giáo viên
Mẹo dành cho giáo viên
Tăng sự tương tác bằng cách tạo ra câu chuyện về bệnh viện! Đây là bệnh viện loại nào và phục vụ những loại bệnh nhân nào?
Quy tắc Thử thách
-
Robot phải bắt đầu và kết thúc ở Khu vực Bắt đầu.
-
Toàn bộ robot phải ở trong Nhà thuốc, Thang máy và Phòng bệnh nhân và chờ các lần sau để hoàn thành các hành động:
-
Nhà thuốc: Chờ ít nhất 5 giây để nhận thuốc.
-
Thang máy: Đợi ít nhất 5 giây để đến tầng khác.
-
Phòng bệnh nhân: Chờ ít nhất 3 giây để trả thuốc.
-
-
Robot không được tiếp xúc hoặc vượt qua bất kỳ bức tường nào.
-
Robot phải đến Nhà thuốc trước để lấy thuốc cho Phòng bệnh nhân.
-
Robot phải đến từng Phòng bệnh nhân (không theo thứ tự cụ thể) để trả thuốc.
-
Chúcbạn vui vẻ!
![]() Hộp công cụ giáo viên
-
Giải pháp
Hộp công cụ giáo viên
-
Giải pháp
Tiêu chí đánh giá học sinh trong chương trình lập trình có thể được tìm thấy tại đây (Google / .docx / .pdf).
Xem giải pháp mẫu VEXcode V5 Python bên dưới:
# Thư viện nhập
từ vex import *
# Bắt đầu mã dự án
# Đi đến hiệu thuốc
drivetrain.drive_for(FORWARD, 900, MM)
drivetrain.turn_for(LEFT, 90, DEGREES)
drivetrain.drive_for(FORWARD, 1350, MM)
drivetrain.turn_for(RIGHT, 90, DEGREES)
drivetrain.drive_for(FORWARD, 600, MM)
wait(6, SECONDS)
# Đi đến phòng 1
drivetrain.drive_for(REVERSE, 600, MM)
drivetrain.turn_for(RIGHT, 90, DEGREES)
drivetrain.drive_for(FORWARD, 600, MM)
drivetrain.turn_for(LEFT, 90, DEGREES)
drivetrain.drive_for(FORWARD, 600, MM)
wait(6, SECONDS)
# Đi đến thang máy
drivetrain.drive_for(REVERSE, 600, MM)
drivetrain.turn_for(RIGHT, 90, DEGREES)
drivetrain.drive_for(FORWARD, 600, MM)
drivetrain.turn_for(LEFT, 90, DEGREES)
drivetrain.drive_for(FORWARD, 600, MM)
wait(6, SECONDS)
# Đi đến phòng 2
drivetrain.drive_for(REVERSE, 800, MM)
drivetrain.turn_for(LEFT, 90, DEGREES)
drivetrain.drive_for(FORWARD, 1000, MM)
drivetrain.turn_for(LEFT, 90, DEGREES)
drivetrain.drive_for(FORWARD, 800, MM)
wait(5, SECONDS)
# Đi đến phòng 3
drivetrain.drive_for(REVERSE, 800, MM)
drivetrain.turn_for(LEFT, 90, DEGREES)
drivetrain.drive_for(FORWARD, 600, MM)
drivetrain.turn_for(RIGHT, 90, DEGREES)
drivetrain.drive_for(FORWARD, 800, MM)
wait(5, SECONDS)
# Đi đến thang máy
drivetrain.drive_for(REVERSE, 800, MM)
drivetrain.turn_for(LEFT, 90, DEGREES)
drivetrain.drive_for(TIẾN, 750, MM)
drivetrain.turn_for(TRÁI, 90, ĐỘ)
drivetrain.drive_for(TIẾN, 750, MM)
wait(6, GIÂY)
# Quay lại vùng bắt đầu
drivetrain.drive_for(ĐI NGƯỢC, 1500, MM)