
Using Sensors with Industrial Robots
![]() Teacher Toolbox
-
Facilitating the Apply Section
Teacher Toolbox
-
Facilitating the Apply Section
What the Teacher Will Do:
- Introduce the Apply reading to your students. Through this reading, they will be learning about different sensors and their functions contained inside and on the outside of an industrial robot.
For more information on how to facilitate the Apply section, go to the V5 Workcell Educator Certification.
Limit Switches

Limit switches are utilized inside or outside a robot’s joints to set the motion limits along with mechanical (hard) stops. As the robot joint reaches (in each direction) its motion limit, it will be stopped by the mechanical stop and the limit switch will produce an electrical signal alerting the robot controller that a motion limit is achieved. A limit switch operates when an object presses against the lever of its switch activating the switch.
Encoders

Incremental Encoder
Robots can use optical shaft encoders (an incremental encoder) to measure rotational distance traveled by a motor shaft. The encoder works by projecting light onto its disk with evenly spaced slits around its circumference. As the disk rotates, light passes through the slits, but is blocked by the spaces between the slits. Each time the light passes through a slit, a pulse is generated by the encoder sensor receiving the light. Counting the number of pulses allows the robot to determine the relative motion between two positions. When the robot is turned off, the position data for the incremental encoder is lost.
Absolute Encoder
An absolute encoder disk has a slightly complicated design compared to an incremental encoder. This encoder can measure the rotational distance traveled by the motor shaft just like the incremental encoder. The operation of the absolute encoder follows a more complicated process with four light beams and a dedicated home position, this allows the position data from the absolute encoder to be kept even after the robot has been turned off.
Potentiometers
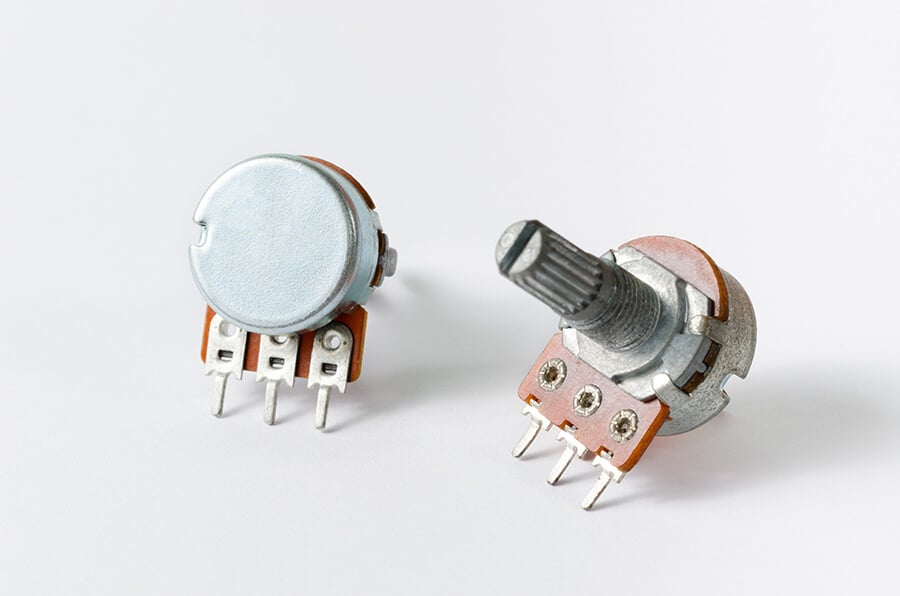
Potentiometers are analog variable resistors, which provide a variable voltage value based on the position of the wiper arm (the piece that moves across the resistive track material), inside of the potentiometer. The bottom part of the potentiometer where the resistive track doesn't cover is called the ‘deadband’ on the potentiometer. If the wiper arm is not connected to the resistive area (in the deadband), then the circuit is open. An open circuit returns 0 volts.
VEX potentiometers go through a hole, so you can pass a square shaft through the center to act as the post, controlling the position of the potentiometer. These are used on the Workcell to identify the position of the joints on the Workcell at all times, based on the wiper arm’s position of the potentiometer. The 3-Wire Port on the V5 Brain converts the voltage values into a digital value between 0 and 4095.
LVDTs and RVDTs
A linear variable differential transformer (LVDT) measures linear motion in a similar way to a potentiometer. The LVDT is made up of three coils. Alternating current drives the primary coil and causes a voltage to be induced in each of the secondary coils. This change in voltage can be used by a robot to determine its position.
A rotary variable differential transformer (RVDT) is a rotary version of an LVDT used for measuring angular displacement and can be used in a similar fashion to a potentiometer or an encoder in a robotic system.
Collision Sensor
Collision sensor is a robotic end-effector or device that can detect a crash before or during a collision of the robot or its tool. A collision sensor is also known with many names as a robot safety joint, robot overload protection device, crash protection device, robot safety mount, robotic clutch, or robotic collision protector. VEX sensors include both an inertial sensor which can measure a change in momentum and the V5 Smart Motors have internal sensors which can measure a change in torque required for the motor to move.
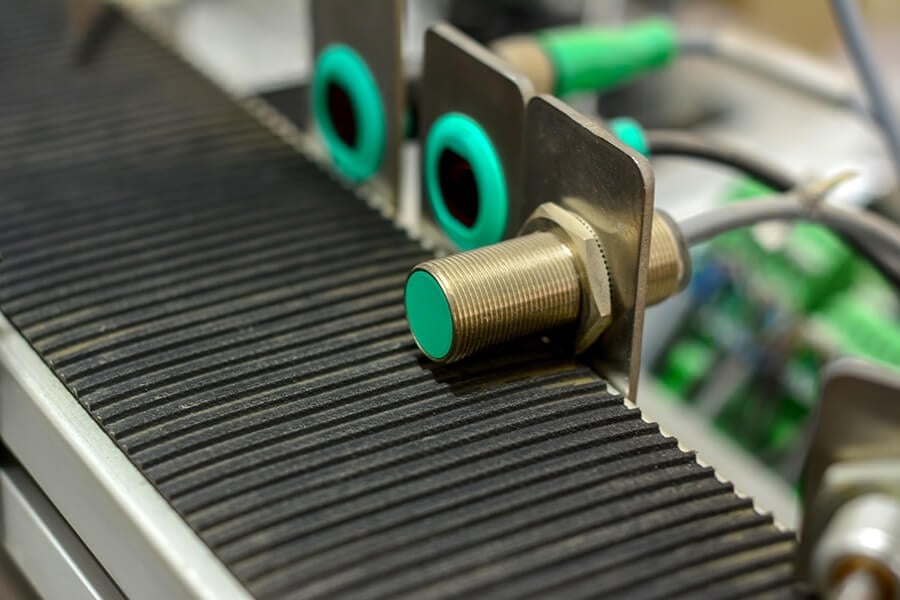
Proximity Switches and Sensors
The term switch applies to an ON/OFF (binary) or a digital device, while a sensor may imply that the device is analog. Proximity switches and sensors detect the presence of an object without physical contact, while proximity sensors may also give more information about the object, such as the distance from the sensor.
Optical Sensors, Machine Vision, and Color Sensing

Machine and robotic vision systems help with the following tasks:
- Part identification
- Part location
- Part orientation
- Part inspection
- Measurement of the x, y, and z-location of a part and calculation of the cross-sectional area of it
Vision system components include a camera, light source, diffuser, and image processor. The basic unit of measurement in non-color (non-RGB) vision systems is the grayscale, the basic parameter measured is light density, and the basic measurement element is the pixel.