
CS Nivel 1 - Bloques VEXcode VR
9 Unidades
¡Comience el viaje hacia el aprendizaje de Ciencias de la Computación con el curso VEXcode VR Computación Nivel 1 - Bloques! Utilizando VEXcode VR y atractivas actividades basadas en robótica, los estudiantes aprenderán sobre el flujo del proyecto, bucles, condicionales y algoritmos.
Acceda al desarrollo profesional continuo que lo apoyará mientras enseña con VEXcode VR. Desarrollo profesional oportuno y específico a través de videos, lecciones, conversaciones comunitarias y más.
Obtenga más información sobre el desarrollo profesional Plus >
Unidad 1
Introducción y fundamentos
Esta unidad le muestra el valor de VEXcode VR y lo fácil que es de usar. Esta Unidad también describe la estructura del curso, dándole una vista previa de lo que se espera y proporcionándole las herramientas para tener éxito.

Unidad 2
Mover tu robot
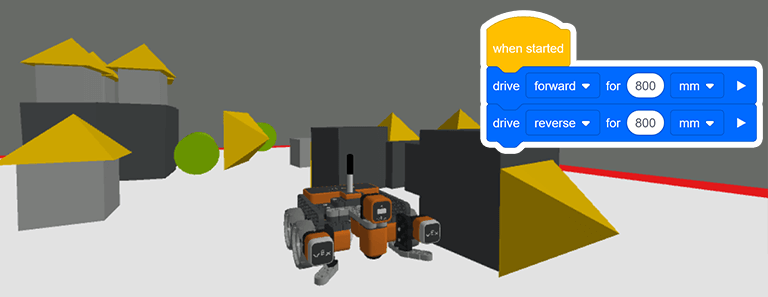
En esta unidad, resolverás el desafío Castle Crasher. Aprenderás a usar VEXcode VR para hacer que el robot VR use los comandos Drivetrain para moverse por el Castle Crasher Playground. También aprenderás a secuenciar los comandos correctamente para derribar todos los castillos en el patio de recreo.

Unidad 3
Comportamientos repetitivos
En esta unidad, resolverás el desafío Dibuja una casa. Aprenderás a usar la herramienta Pluma en un robot de realidad virtual para dibujar diferentes formas en el patio de recreo de Art Canvas. También aprenderás a usar bucles en VEXcode VR para repetir un conjunto de comportamientos varias veces, como dibujar los lados de un cuadrado.
Unidad 4
Navegar por un laberinto
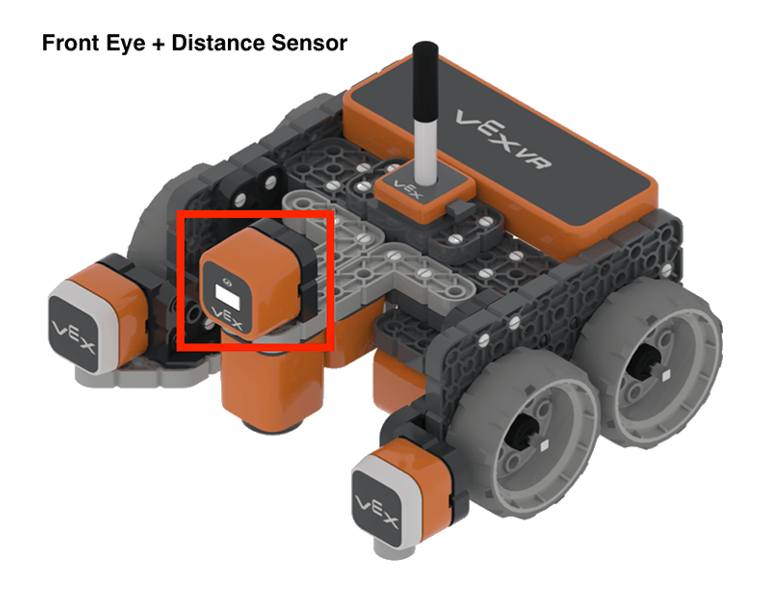
Esta unidad le mostrará cómo usar la entrada del sensor para navegar por el robot de realidad virtual independientemente de su entorno, en lugar de un movimiento de "codificación rígida" con solo comandos de transmisión. Este es un primer paso importante para poder construir un algoritmo efectivo. Trabajarás en el Desafío del Laberinto de Pared usando VEXcode VR para navegar el Robot VR a través del patio de recreo del Laberinto de Pared de principio a fin. Aprenderás a usar el sensor de parachoques y el bloque [Esperar hasta] para resolver el desafío del laberinto de pared.
Unidad 5
Detección de muros a distancia
¡En esta unidad, navegarás por el robot de realidad virtual de principio a fin a través del desafío del laberinto de paredes sin chocar contra las paredes! Aprenderás a usar el sensor de distancia en el robot de realidad virtual con bloques de comparación para resolver el desafío del laberinto de pared.
Unidad 6
Conocer su ubicación
¡En esta unidad, completarás el desafío Drive to Three Numbers y usarás el sensor de ubicación para navegar por el robot VR a tres ubicaciones numeradas diferentes en el patio de recreo del mapa de cuadrícula numérica! Aplicarás bloques de las categorías Tren de transmisión, Detección y Control en la secuencia correcta para resolver el desafío Drive to Three Numbers.
Unidad 7
Decisiones con colores
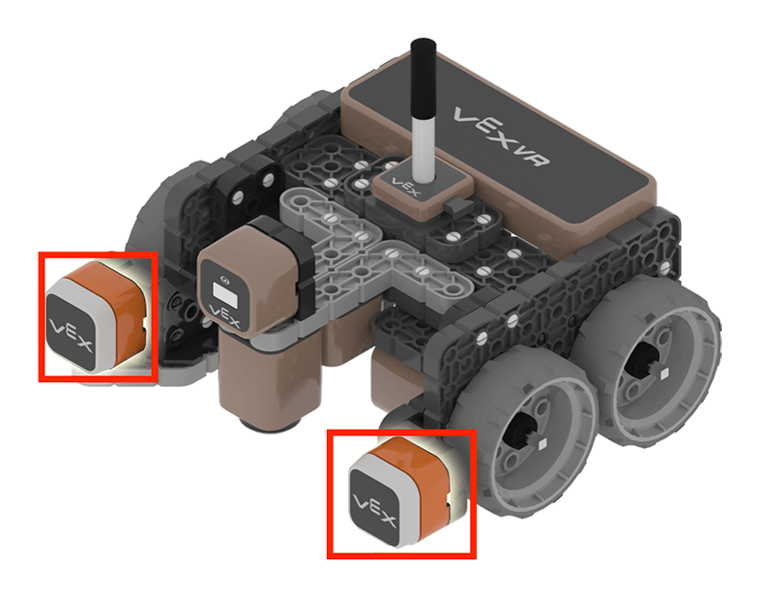
En esta unidad, se le presentará la importancia de las declaraciones condicionales. Explorará por qué las declaraciones condicionales, como el bloque [If then], deben usarse con bucles, como los bloques [Forever], para que el Robot VR se comporte según lo previsto. Aprenderá a usar el sensor ocular y las declaraciones condicionales para resolver el desafío del laberinto de discos. En el Desafío del Laberinto de Discos, el Robot VR navegará por el Área de Juegos del Laberinto de Discos de principio a fin utilizando el Sensor de Ojos para detectar colores.

Unidad 8
Mover discos con bucles
En esta unidad, aprenderá la importancia de la retroalimentación del sensor y los bucles de anidación. Aprenderá a usar el electroimán en el robot de realidad virtual para recoger y soltar discos para resolver el desafío del desplazador de discos. Aplicarás las habilidades aprendidas en unidades anteriores para crear un proyecto de realidad virtual VEXcode que utilice sensores y bucles de robots de realidad virtual para resolver el desafío del desplazador de discos.
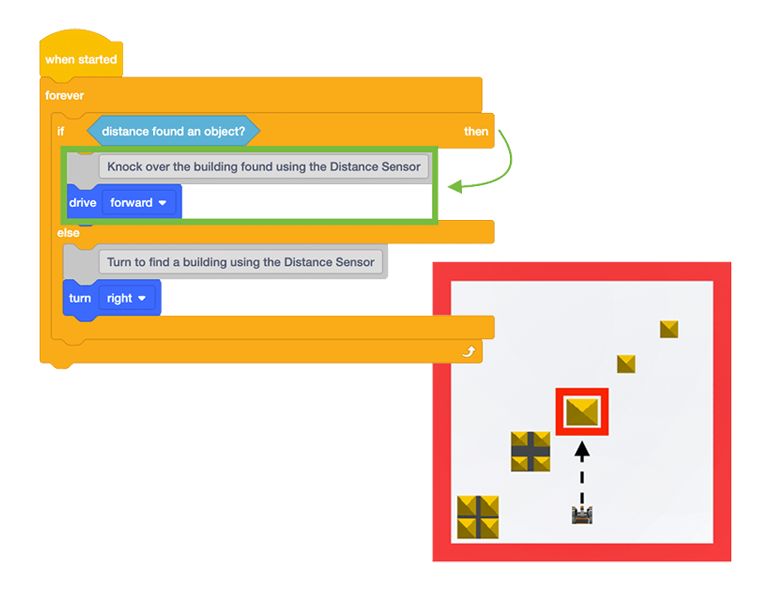
Unidad 9
Desarrollo de algoritmos
Esta unidad te presenta los algoritmos. De vuelta en la Unidad 2, resolviste el Castle Crasher Challenge en un patio de recreo donde el diseño no cambió. En esta unidad, tendrás que resolver el mismo desafío, pero en un patio de recreo que cambia el diseño con cada reinicio. Esto introduce la necesidad de un algoritmo que utilice la retroalimentación del sensor en lugar de una secuencia de comandos simples.