Contexte
L'unité Touch to Code vous familiarisera, vous et vos élèves, avec les concepts de codage fondamentaux à l'aide des boutons tactiles du robot 123. Les élèves apprendront la terminologie associée aux comportements des robots, y compris la décomposition et le séquençage, et ils utiliseront ce langage pour s'engager dans des explorations guidées, étudier les bases du codage et résoudre des problèmes à l'aide du robot 123.
Qu'est-ce qu'un robot ?
Un robot est un appareil qui peut effectuer une action une fois qu'il est programmé pour le faire. En
informatique, un robot est défini comme un dispositif capable de détecter, de penser et d'agir. Ceci est
communément appelé la boucle de décision Sense → Think → Act.
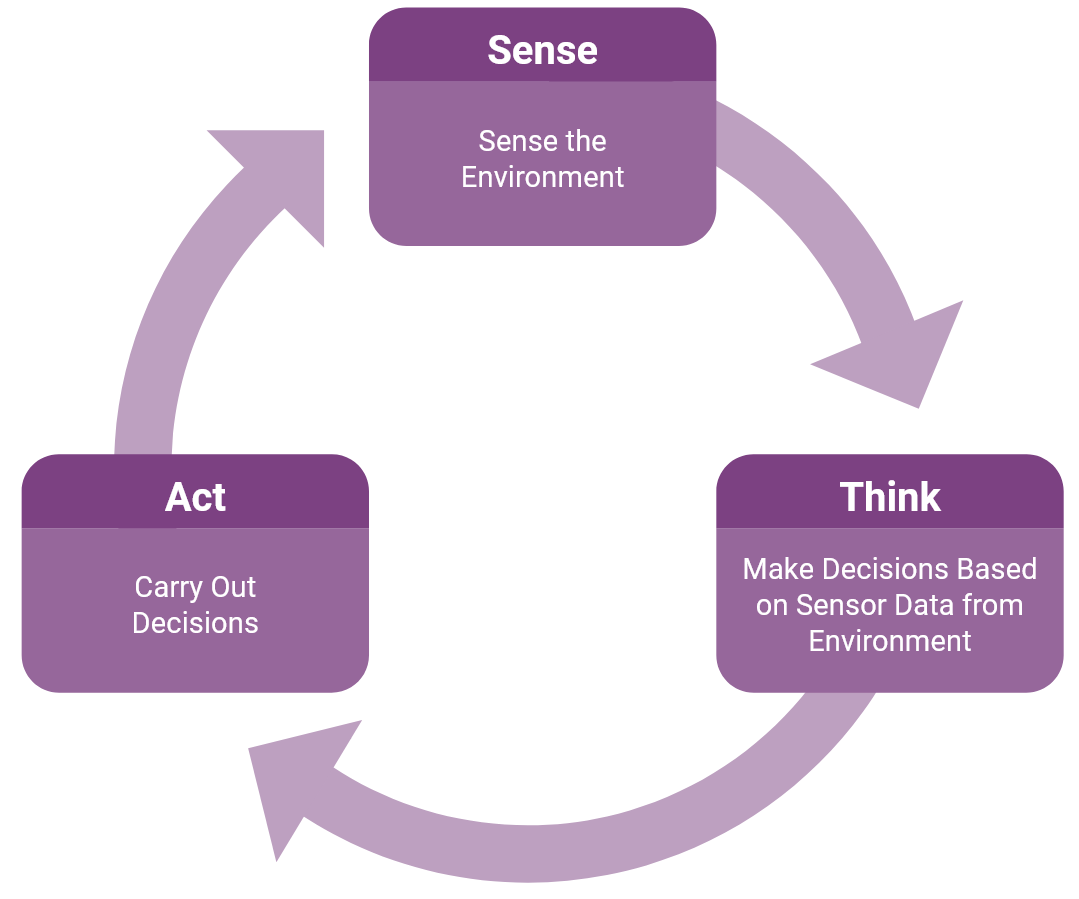
Un robot 123 utilise des capteurs pour collecter des données de son environnement (Sense), prendre des décisions en fonction de ces informations (Think) et transformer ces informations en instructions de comportement (Act). Un appareil, comme un téléphone, n'est pas un robot parce qu'il est incapable d'agir sur ou dans son environnement. Cette capacité à agir est une caractéristique déterminante de ce qui fait de quelque chose un robot, par opposition à un autre type d'appareil.
Il est important de noter pour les étudiants qu'un robot ne peut pas penser par lui-même, il ne peut faire que ce pour quoi il est programmé. Un robot a besoin de programmation, ou de codage, pour pouvoir agir sur son environnement.
Qu'est-ce que VEX 123 ?
VEX 123 permet aux enfants d'explorer les concepts de l'informatique, et à vous, l'enseignant, d'incorporer des éléments tels que le raisonnement spatial, le codage et la décomposition dans un large éventail de domaines de contenu. VEX 123 offre aux étudiants et aux enseignants la possibilité de s'engager et de partager du code facilement et concrètement tout au long des activités d'un laboratoire. Il existe un certain nombre d'unités et de laboratoires écrits pour vous donner des idées sur les façons d'utiliser VEX 123 dans votre classe, et tous incluront l'utilisation de votre robot 123 de manière pratique.

Les ressources pour les enseignants sont conçues pour vous fournir la structure et le soutien nécessaires pour intégrer VEX 123 dans votre environnement d'apprentissage. Ces ressources aideront les enseignants novices à apporter la technologie et l'innovation à leurs écoles et les enseignants expérimentés à créer les salles de classe du futur. Les ressources disponibles sur la page 123 Ressources pour les enseignants comprennent :
- Un guide de démarrage pour intégrer VEX 123 dans votre apprentissage STEM.
- Un guide de mise en œuvre pour vous aider à commencer à enseigner les laboratoires STEM.
- Un document de valeur pour l' enseignant expliquant la pédagogie derrière la création de laboratoires STEM.
- Un guide de stimulation cumulative pour vous aider à vous aligner et à planifier les laboratoires STEM à enseigner.
- Une liste de normes de contenu où des graphiques spécifiques à chaque pays sont disponibles pour montrer l'alignement des normes sur les laboratoires STEM VEX 123.
- Une liste de matériaux de base STEM Lab avec tout ce dont vous avez besoin pour mettre en œuvre STEM Labs dans votre école ou votre salle de classe.
Qu'est-ce qu'un langage de programmation ?
Un langage de programmation est le mode de communication entre un ordinateur et un programmeur. Les langages de programmation suivent des instructions étape par étape qu'un ordinateur comprend pour que ses programmes fonctionnent. Les enfants expérimentent les langages de programmation au début du codage en créant des commandes simples à l'aide du langage directionnel. La création de ces commandes nécessite que les élèves combinent leurs compétences en communication, en réflexion et en résolution de problèmes.
Le robot 123 utilise des boutons tactiles comme commandes. Des combinaisons de pressions sur les boutons communiquent au robot les actions ou les comportements qu'il doit effectuer. Dans cette unité, les élèves utiliseront les boutons en haut du robot 123 pour coder le robot afin de relever les défis. Le tableau suivant vous montre le comportement exécuté avec chacun des boutons tactiles du robot 123.
| Bouton | Nom | Comportement |
|---|---|---|
|
Début | Démarre le projet lorsqu'il est pressé. |
 |
Déplacer | 123 Le robot avancera pour 1 longueur de robot, ou 1 carré sur le champ 123. |
|
Droite | 123 Le robot tournera sur place à 90 degrés vers la droite. |
|
Gauche | 123 Le robot tournera sur place à 90 degrés vers la gauche. |
|
Son | 123 Le robot émettra un son de klaxon. |
Qu'est-ce que la décomposition ?
La décomposition consiste à décomposer un problème complexe en comportements plus gérables et plus faciles à comprendre. Diviser le problème en parties plus petites signifie que chaque partie peut être examinée plus en détail et résolue plus facilement. Par exemple, si un étudiant souhaite que son robot se déplace dans un carré, il devra le décomposer en commandes plus petites. Il est important que les élèves s'entraînent à affiner le processus de décomposition, car ils ne peuvent pas décomposer les commandes en composants plus petits au début.
| Déménager dans une répartition carrée 1 | Déménager dans une répartition carrée 2 | Déménager dans une répartition carrée 3 |
|---|---|---|
|
|
|
Comment le séquençage est-il utilisé dans cette unité ?
La séquence est l'ordre dans lequel les commandes sont exécutées dans un projet. Les commandes des boutons tactiles sont exécutées en commençant par le premier bouton appuyer et exécuter dans l'ordre où les boutons sont enfoncés. Le tableau ci-dessous montre une séquence de pressions sur les boutons pour coder le robot 123 afin qu'il se déplace dans un carré. La séquence des pressions sur les boutons est de gauche à droite. Si les élèves n'ont pas appuyé sur les boutons dans le bon ordre, le robot 123 ne bougera pas comme prévu.
| 1 | 2 | 3 | 4 | 5 | 6 | 7 | 8 |
|---|---|---|---|---|---|---|---|
|
|
|
|
|
|
|
|
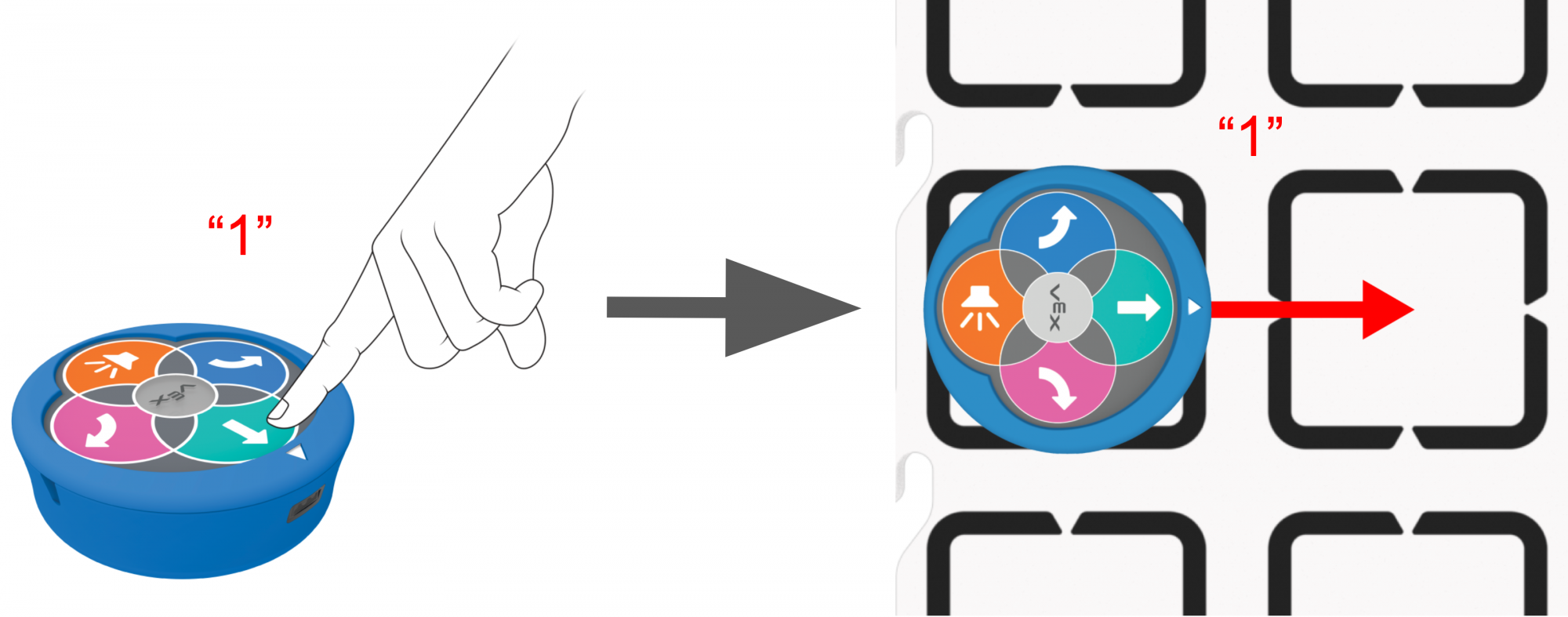
Les élèves devront comprendre qu'il y a une correspondance 1:1 entre une pression sur un bouton et l'action du robot afin de planifier leurs projets. Pour chaque pression d'un bouton sur le dessus du robot 123, le robot déplacera ou tournera une unité ou jouera un son une fois. Pour plus d'informations sur l'utilisation des boutons tactiles sur le robot 123, consultez l'article Codage avec les boutons tactiles sur la bibliothèque VEX du robot 123.
Afin de dire à un robot exactement et précisément comment se déplacer, la décomposition et le séquençage sont nécessaires. Tout d'abord, le problème, comme la façon de passer aux lettres d'un mot, sera décomposé en incréments et comportements plus petits. Ensuite, une fois ces comportements identifiés, ils doivent être organisés dans la bonne séquence. Ceci est important car le robot 123 ne se déplacera que comme indiqué par les pressions sur les boutons tactiles. Dans l' animation suivante, vous pouvez voir que le 123 Robot est codé avec des pressions sur les boutons qui conduisent le robot à la première lettre, le font tourner, puis conduisent sur les lettres du mot « CHAT ».
Étapes de planification et de séquençage d'un projet
La planification de projet exige que les élèves identifient l'objectif de leur projet, puis décomposent les étapes nécessaires pour atteindre cet objectif en étapes distinctes qui peuvent être exécutées par le robot 123. Une fois qu'ils auront décomposé les étapes en comportements tactiles, ils séquenceront les pressions sur les boutons pour construire leur projet. Ensuite, ils peuvent ensuite tester le projet sur le champ 123 pour s'assurer qu'il atteint l'objectif.
- Tout d'abord, identifiez l'objectif - que faut-il faire ? Par exemple, faites passer le 123 Robot sur chacune des lettres du mot CAT.

- Ensuite, décomposez les étapes nécessaires pour atteindre l'objectif et identifiez les pressions sur les boutons nécessaires pour accomplir ces étapes. Ici, vous devrez d'abord avancer d'un carré à la lettre « C ». Tournez ensuite à droite et avancez d'un carré pour atteindre la lettre « A ». Et enfin, avancez d'un carré de plus à la lettre « T ». Pour ce faire, appuyez sur les boutons « Déplacer » et « Tourner à droite ».
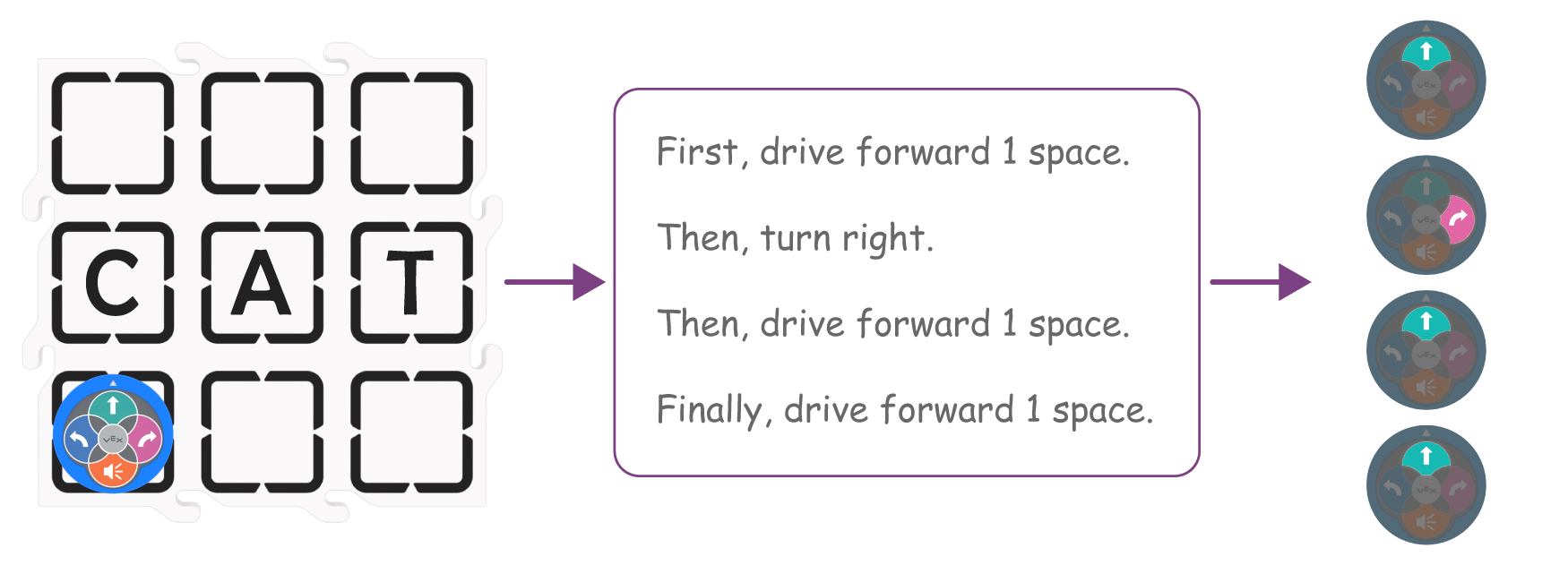
- Ensuite, planifiez la séquence du projet. Quel est l'ordre des pressions sur les boutons nécessaires pour atteindre l'objectif ?
| 1 | 2 | 3 | 4 |
|---|---|---|---|
 |
|
|
|
- Sélectionnez « Démarrer » pour tester le projet et voir si le robot 123 atteint l'objectif identifié à la première étape.