De plus en plus
6 Cours
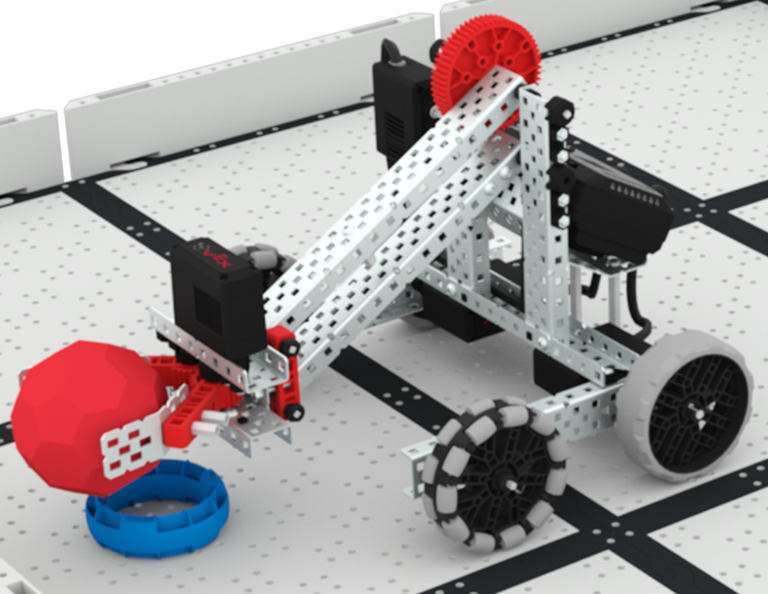
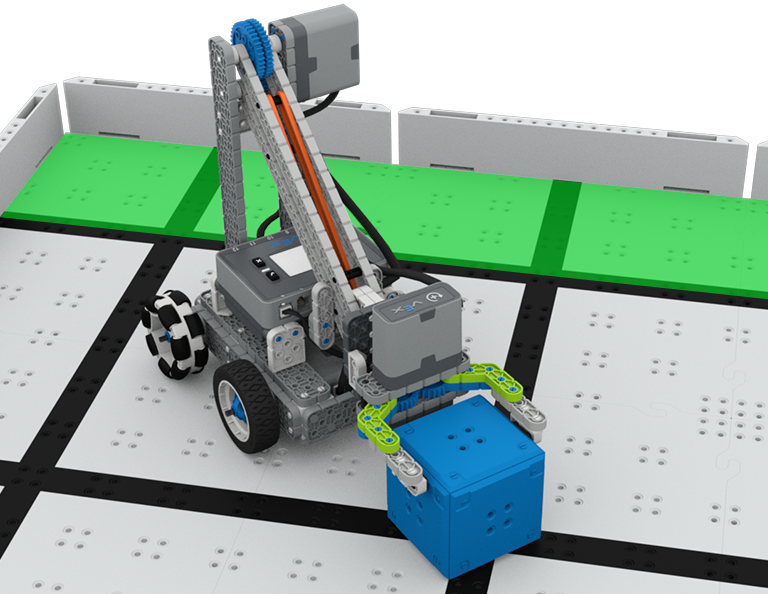
Dans cette unité, vous découvrirez comment concevoir un Clawbot pour collecter, ramasser et déplacer des Buckyballs d'un côté à l'autre du terrain, dans le cadre de la compétition Up and Over !
Visitez le portail de l'enseignant pour accéder au matériel de soutien et aux vidéos destinés aux enseignants sur le contenu et l'animation des leçons Up and Over.
Leçon 1 : Introduction
Dans cette leçon, vous serez initié à la compétition Up and Over, configurez la batterie et le contrôleur, préparez-vous à coder et à construire le Clawbot.
Leçon 2 : Conception de griffes
Dans cette leçon, vous apprendrez ce qu'est une griffe, comment une griffe efficace fonctionne et comment le dépistage peut bénéficier aux conceptions et à la stratégie de votre équipe. Ensuite, vous appliquerez ce que vous avez appris dans le défi Grab and Go.
Leçon 3 : Conception des bras
Dans cette leçon, vous en apprendrez plus sur les différents éléments des bras robotiques, y compris leur fonctionnement, et ce qui fait une conception de bras efficace. Ensuite, vous concevrez et construirez un bras pour que votre robot empile des Buckyballs en anneaux pour le défi Stacked Up.
Leçon 4 : Groupes moteurs
Dans cette leçon, vous apprendrez ce que sont les groupes moteurs, comment ils peuvent être utiles et comment configurer les groupes moteurs dans VEXcode EXP afin d'itérer sur votre robot pour terminer le défi Up and Over.
Leçon 5 : Concurrence accrue
Dans cette leçon, vous appliquerez les enseignements des leçons précédentes pour participer à la compétition Up and Over !

Leçon 6 : Conclusion
Dans cette leçon, vous réfléchirez à l'unité et identifierez les liens entre ce que vous avez fait et une carrière STEM.
Robot de football
4 Cours
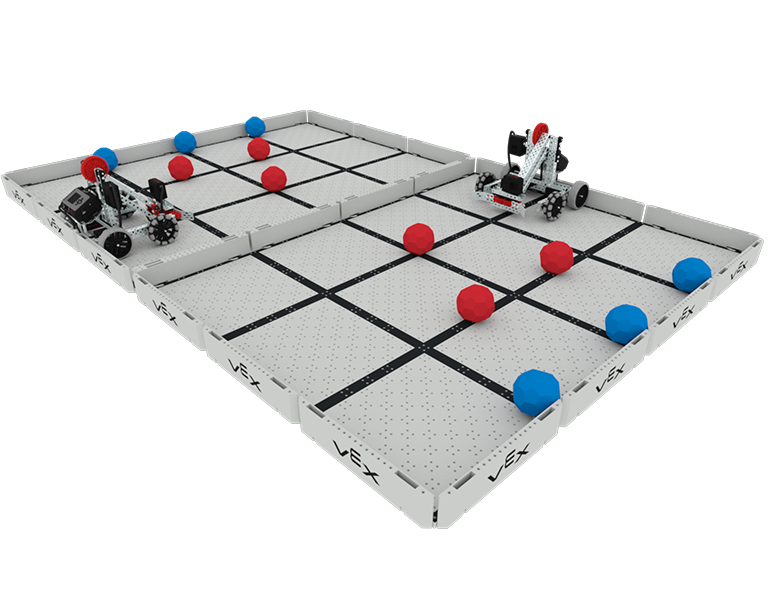
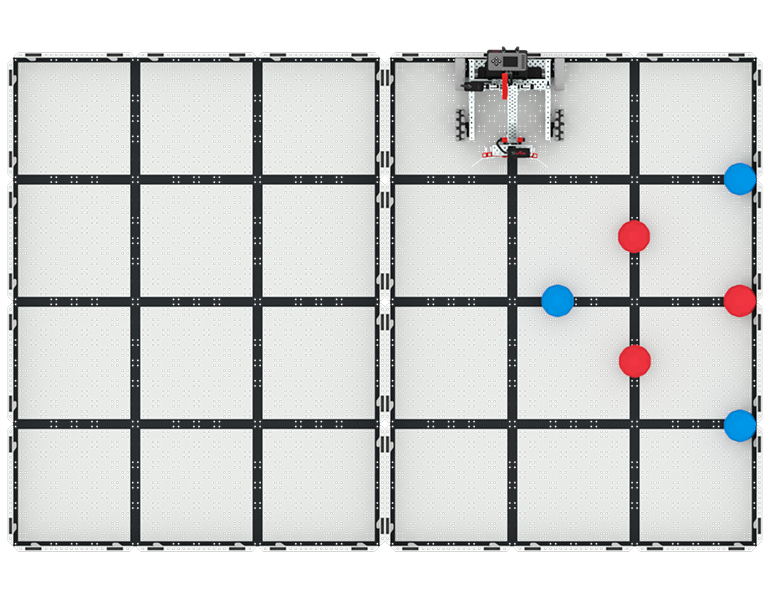
Dans cette unité, vous découvrirez comment créer un manipulateur sur votre robot pour saisir, passer et marquer le plus de buts en tant que joueur de football robot dans la compétition Robot Soccer !
Visitez le portail des enseignants pour accéder au matériel de soutien aux enseignants et aux vidéos sur le contenu et l'animation des leçons de Robot Soccer.
Leçon 1 : Introduction
Dans cette leçon, vous allez construire le Clawbot, charger votre contrôleur et votre batterie, et vous préparer à coder.

Leçon 2 : Manipulateurs
Dans cette leçon, vous en apprendrez plus sur les manipulateurs passifs et actifs et la conception de l'admission, afin d'itérer sur la conception de votre robot et de participer à un défi de football robotisé en tête-à-tête !
Leçon 3 : Compétition de football robotisé
Dans cette leçon, vous appliquerez les enseignements de la leçon précédente pour participer à la compétition Robot Soccer !
Leçon 4 : Conclusion
Dans cette leçon, vous réfléchirez à l'unité et identifierez les liens entre ce que vous avez fait et une carrière STEM connectée.

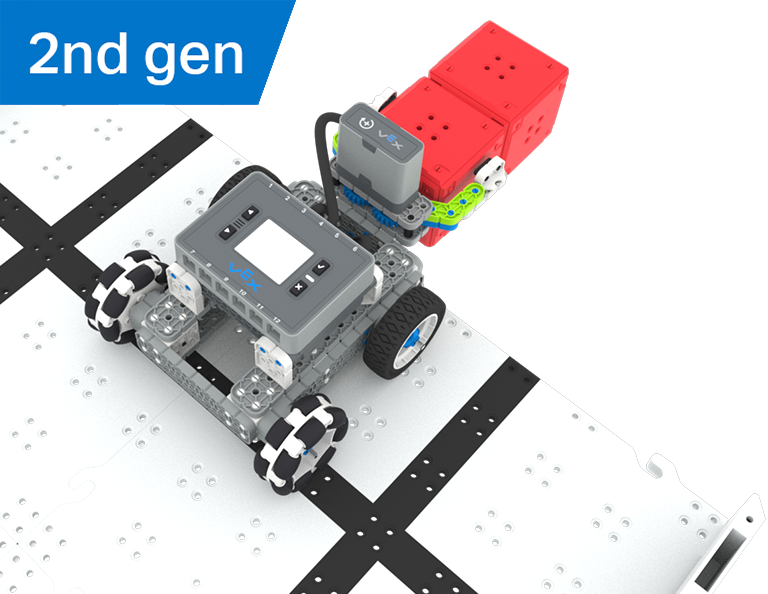
De plus en plus
6 Cours
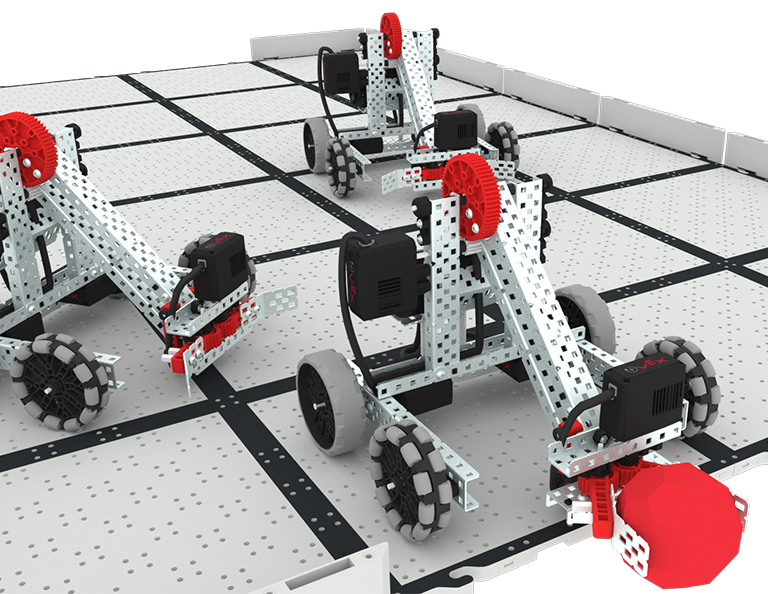
Dans cette unité, vous découvrirez comment concevoir un Clawbot pour collecter, ramasser et déplacer des cubes d'un côté à l'autre du terrain, dans le cadre de la compétition Up and Over !
Visitez le portail de l'enseignant pour accéder au matériel de soutien et aux vidéos destinés aux enseignants sur le contenu et l'animation des leçons Up and Over.

Leçon 1 : Introduction
Dans cette leçon, vous serez initié à la compétition Up and Over, configurez la batterie et le contrôleur, préparez-vous à coder et à construire le Clawbot.
Leçon 2 : Conception de griffes
Dans cette leçon, vous apprendrez ce qu'est une griffe, comment une griffe efficace fonctionne et comment le dépistage peut bénéficier aux conceptions et à la stratégie de votre équipe. Ensuite, vous appliquerez ce que vous avez appris dans le défi Grab and Go.
Leçon 3 : Conception des bras
Dans cette leçon, vous en apprendrez plus sur les différents éléments des bras robotiques, leur fonctionnement et ce qui rend une conception de bras efficace, afin d'empiler autant de cubes que possible en une minute dans le défi Stacked Up.
Leçon 4 : Groupes moteurs
Dans cette leçon, vous apprendrez ce que sont les groupes moteurs, comment ils peuvent être utiles et comment configurer les groupes moteurs dans VEXcode IQ afin d'itérer sur votre robot pour terminer le défi Up and Over.
Leçon 5 : Concurrence accrue
Dans cette leçon, vous appliquerez les enseignements des leçons précédentes pour participer à la compétition Up and Over !

Leçon 6 : Conclusion
Dans cette leçon, vous réfléchirez à l'unité et identifierez les liens entre ce que vous avez fait et une carrière STEM.
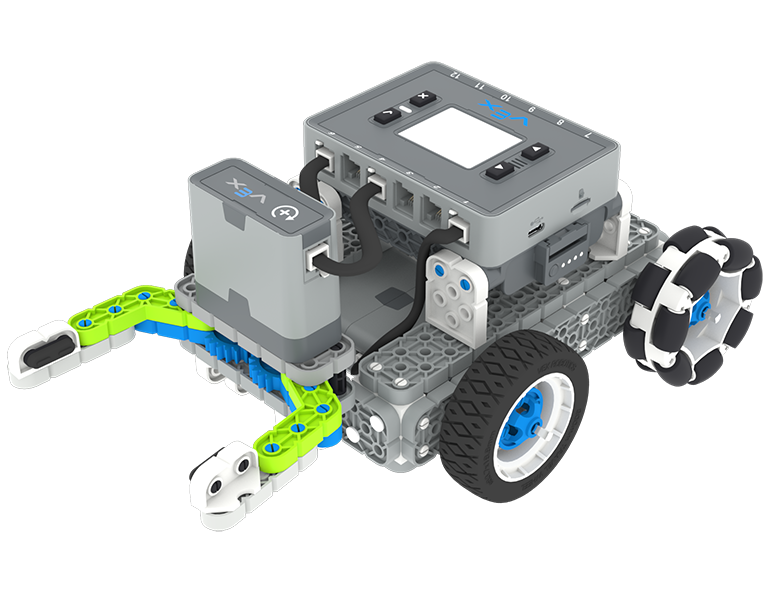
Robot de football
4 Cours
Dans cette unité, vous découvrirez comment créer un manipulateur sur votre robot pour saisir, passer et marquer le plus de buts en tant que joueur de football robot dans la compétition Robot Soccer !
Visitez le portail des enseignants pour accéder au matériel de soutien aux enseignants et aux vidéos sur le contenu et l'animation des leçons de Robot Soccer.
Leçon 1 : Introduction
Dans cette leçon, vous allez construire le Clawbot simple, charger votre contrôleur et votre batterie, et vous préparer à coder.
Leçon 2 : Manipulateurs
Dans cette leçon, vous découvrirez les manipulateurs passifs et actifs et la conception d'admission, afin de répéter la conception de votre robot et de participer à un défi de football de robot en tête-à-tête !
Leçon 3 : Compétition de football robotisé
Dans cette leçon, vous appliquerez les enseignements de la leçon précédente pour participer à la compétition Robot Soccer !
Leçon 4 : Conclusion
Dans cette leçon, vous réfléchirez à l'unité et identifierez les liens entre ce que vous avez fait et une carrière STEM connectée.

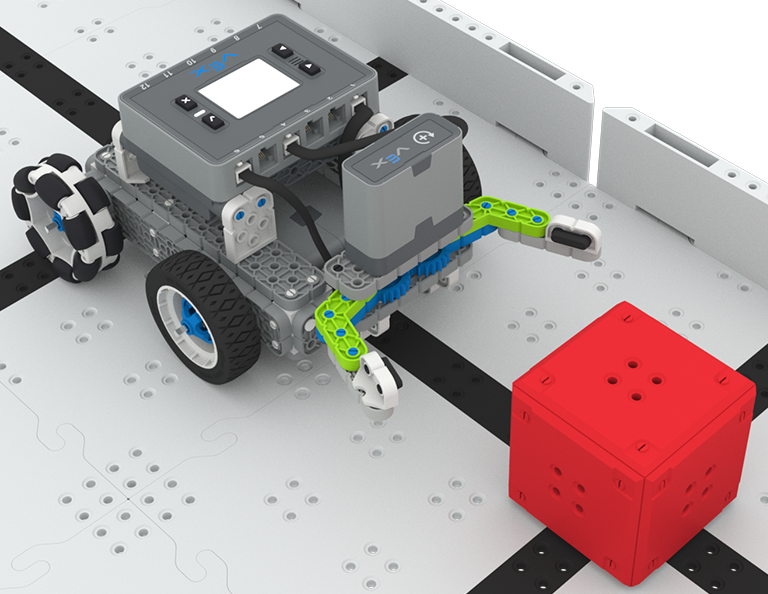
Collectionneur de cubes
6 Cours
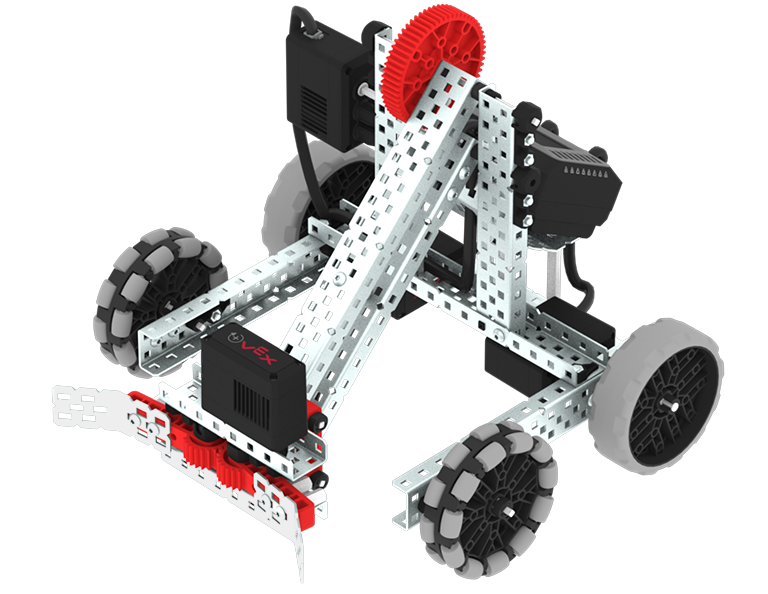
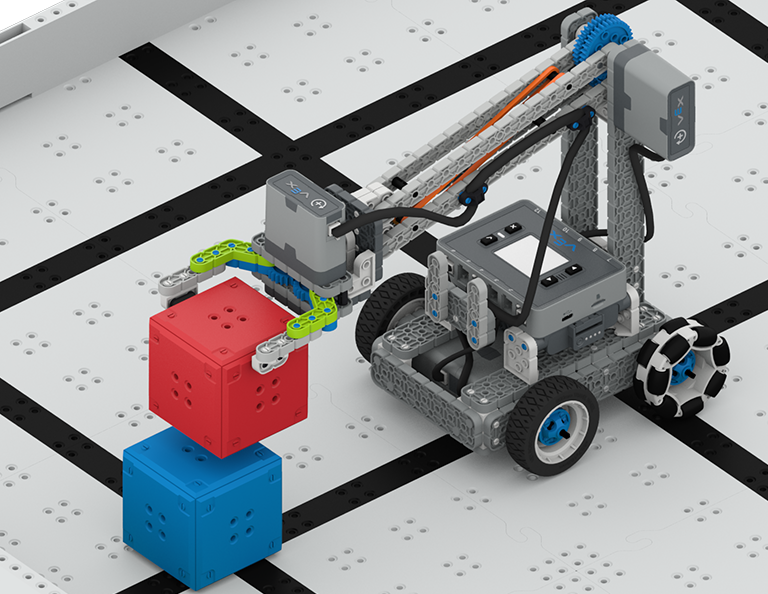
Dans cette unité, vous explorerez la différence entre le contrôle du conducteur et les défis autonomes, en apprenant à conduire le Clawbot et à le coder pour trier et empiler des cubes dans le cadre du concours Cube Collector !
Visitez le portail de l'enseignant pour accéder au matériel de soutien aux enseignants et aux vidéos sur le contenu et l'animation des leçons Cube Collector.
Leçon 1 : Introduction
Dans cette leçon, vous serez initié au concours Cube Collector, construisez le Clawbot et préparez-vous à coder.

Leçon 2 : Contrôle du conducteur
Dans cette leçon, vous apprendrez à utiliser le programme de contrôle du conducteur sur le cerveau IQ afin de pouvoir conduire le Clawbot pour empiler et marquer des cubes sur le terrain et participer au défi Speed Stack.

Leçon 3 : Codage des mouvements autonomes
Dans cette leçon, vous apprendrez à coder votre robot pour des mouvements autonomes, y compris comment planifier la trajectoire de votre robot. Ensuite, vous créerez un projet VEXcode IQ pour marquer et empiler des cubes dans le défi autonome Coding for Cubes.

Leçon 4 : Utilisation de plusieurs programmes (autonomes et pilotes)
Dans cette leçon, vous apprendrez à personnaliser les commandes du conducteur et à utiliser le contrôleur et le VEXcode IQ pour optimiser votre stratégie de conducteur afin de relever un défi avec le contrôle du conducteur et les courses autonomes.

Leçon 5 : Concours de collecteurs de cubes
Dans cette leçon, vous appliquerez les enseignements des leçons précédentes pour participer au concours Cube Collector !

Leçon 6 : Conclusion
Dans cette leçon, vous réfléchirez à l'unité et identifierez les liens entre ce que vous avez fait et une carrière STEM connexe.

Crasheur de château
6 Cours
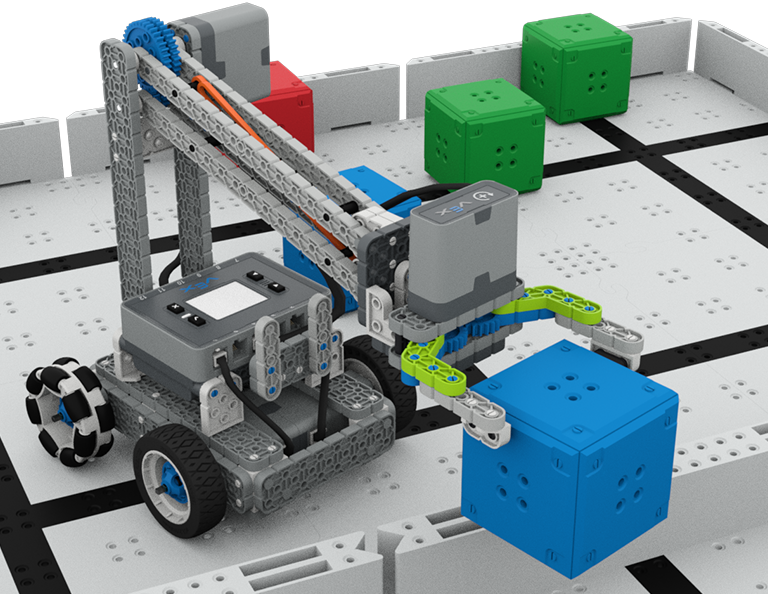
Dans cette unité, vous découvrirez comment utiliser les capteurs optiques et de distance pour rechercher, écraser et nettoyer des « châteaux » de cubes afin de marquer des points dans la compétition Castle Crasher !
Visitez le portail des enseignants pour accéder au matériel de soutien aux enseignants et aux vidéos sur le contenu et l'animation des leçons Castle Crasher.

Leçon 1 : Introduction
Dans cette leçon, vous découvrirez le concours Castle Crasher, construisez le BaseBot et préparez-vous à coder.

Leçon 2 : Casse-tête de château sans capteurs
Dans cette leçon, vous apprendrez à calculer les angles et à modifier la vitesse de votre robot afin de pouvoir participer au défi Tower Over.

Leçon 3 : Crasher de château + capteur de distance
Dans cette leçon, vous apprendrez ce qu'est le capteur de distance et comment il peut être utilisé sur votre robot. Vous découvrirez également le bloc [Attendre] et comment il peut être utilisé dans un projet VEXcode IQ. Ensuite, vous appliquerez ce que vous avez appris à participer au Cube Crasher Challenge !

Leçon 4 : Création d'algorithmes
Dans cette leçon, vous en apprendrez plus sur le capteur optique et sur la façon de créer un algorithme qui utilise les commentaires du capteur. Ensuite, vous allez coder votre robot pour trouver de manière autonome des cubes et les pousser hors du champ dans le défi Balayer le champ.

Leçon 5 : Concours Castle Crasher
Dans cette leçon, vous appliquerez les enseignements des leçons précédentes pour participer à une compétition Castle Crasher !
Leçon 6 : Conclusion
Dans cette leçon, vous réfléchirez à l'unité et identifierez les liens entre ce que vous avez fait et une carrière STEM.
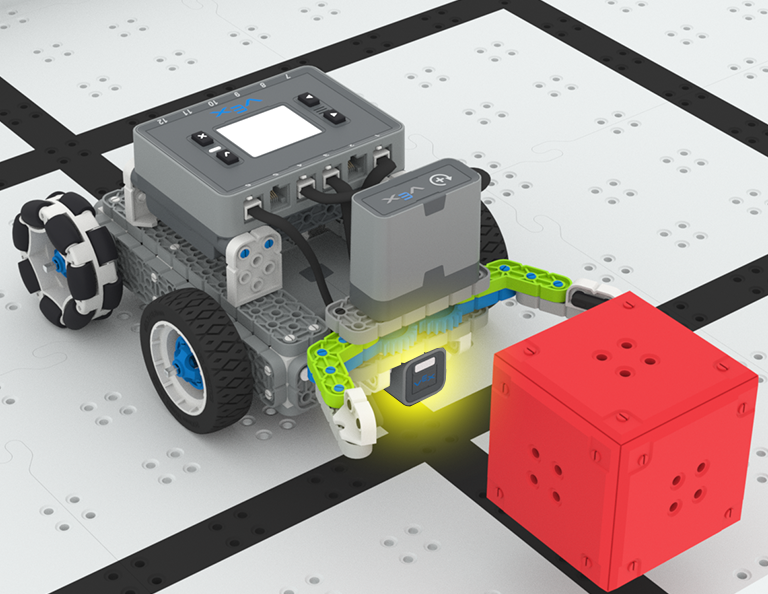
Chasse au trésor
5 Cours
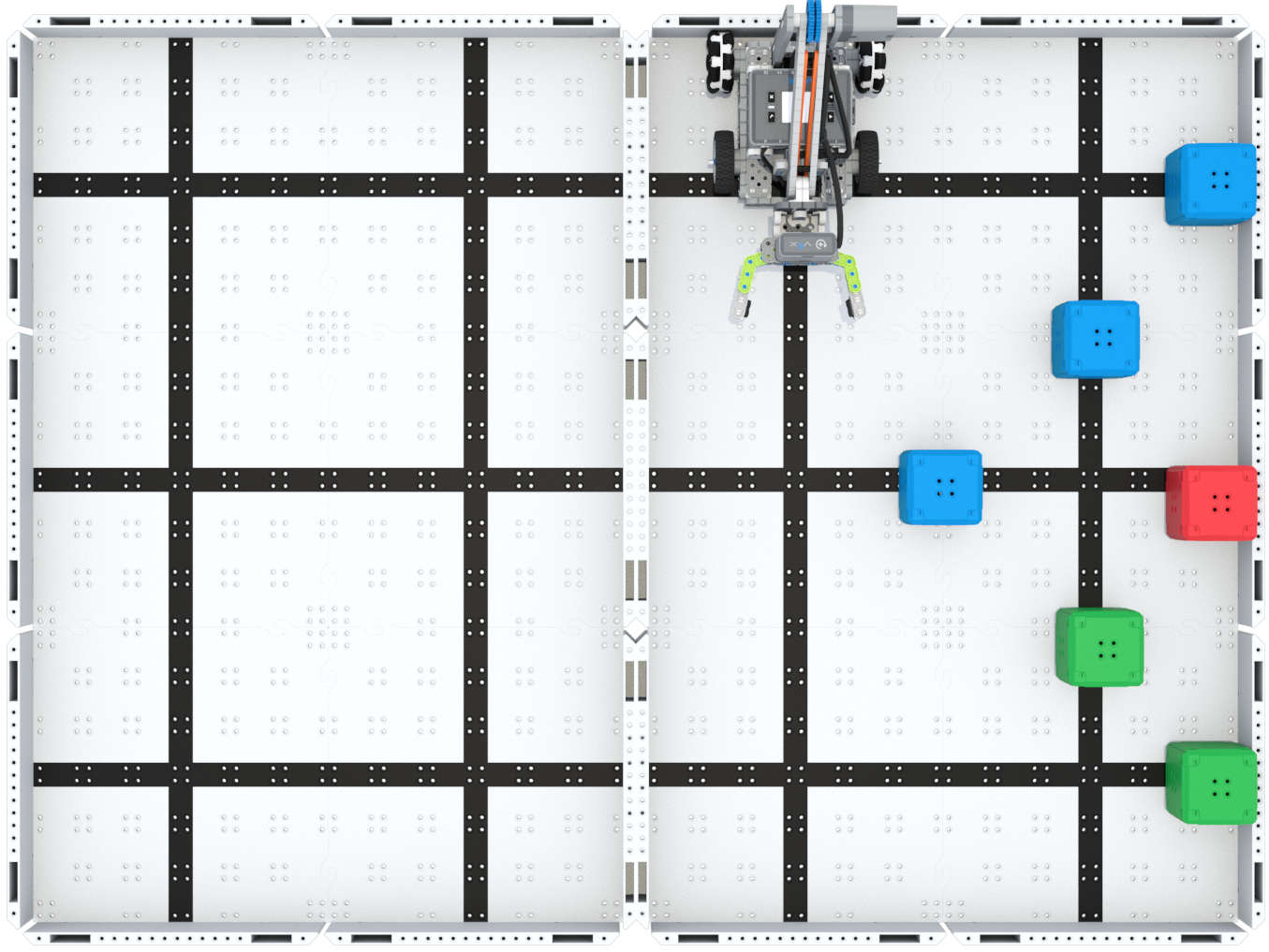
Dans cette unité, vous construirez et coderez le Simple Clawbot avec le capteur optique pour reconnaître et collecter des cubes rouges pour participer à la compétition de chasse au trésor !
Visitez le portail des enseignants pour accéder au matériel de soutien aux enseignants et aux vidéos sur le contenu et l'animation des leçons de chasse au trésor.
Leçon 1 : Introduction
Vous serez initié à la compétition Chasse au trésor, construisez le Clawbot simple et préparez-vous à coder.
Leçon 2 : Pas de capteur de griffe
Dans cette leçon, vous apprendrez à utiliser les blocs de transmission et de mouvement dans VEXcode IQ pour coder votre Clawbot simple afin de collecter et de déplacer des cubes dans le défi Clawbot Collector.
Leçon 3 : Griffe avec capteur
Dans cette leçon, vous apprendrez à coder le capteur optique afin de détecter, collecter et déplacer un cube rouge dans le défi Mover Treasure !
Leçon 4 : Compétition de chasse au trésor
Dans cette leçon, vous appliquerez les enseignements des leçons précédentes pour participer à un concours de chasse au trésor !
Leçon 5 : Conclusion
Dans cette leçon, vous réfléchirez à l'unité et identifierez les liens entre ce que vous avez fait et une carrière STEM.