
पृष्ठभूमि
मंगल रोवर: मंगल भूविज्ञान अन्वेषण इकाई आपको और आपके विद्यार्थियों को किसी समस्या के समाधान के लिए VEXcode GO परियोजनाओं के निर्माण से परिचित कराएगी। पर्सिवियरेंस रोवर और मार्स 2020 मिशन की गतिविधियों को उन चुनौतियों के लिए प्रेरणा के रूप में उपयोग किया जाता है, जिन पर छात्र VEXcode GO और कोड बेस रोबोट का उपयोग करके काम करेंगे। उनके द्वारा बनाई गई परियोजनाओं को डिस्क एकत्रित करने तथा उन्हें रंग के आधार पर छांटने के लिए सेंसर डेटा का उपयोग करने की आवश्यकता होगी।
नासा का मंगल 2020 मिशन
नासा का मंगल 2020 मिशन मंगल ग्रह के अन्वेषण के लिए उच्च प्राथमिकता वाले विज्ञान लक्ष्यों को संबोधित करता है: जीवन, जलवायु, भूविज्ञान और मानव। मार्स 2020 पर्सिवियरेंस रोवर को मंगल ग्रह के भूविज्ञान को बेहतर ढंग से समझने और प्राचीन जीवन के संकेतों की तलाश करने के लिए डिज़ाइन किया गया है। यह मिशन भूवैज्ञानिक रूप से विविधतापूर्ण लैंडिंग स्थल जेजेरो क्रेटर के आसपास के क्षेत्र का अन्वेषण करेगा, विशेष रूप सेविशेष चट्टानों की खोज में जो समय के साथ जीवन के संकेतों को संरक्षित करने के लिए जानी जाती हैं
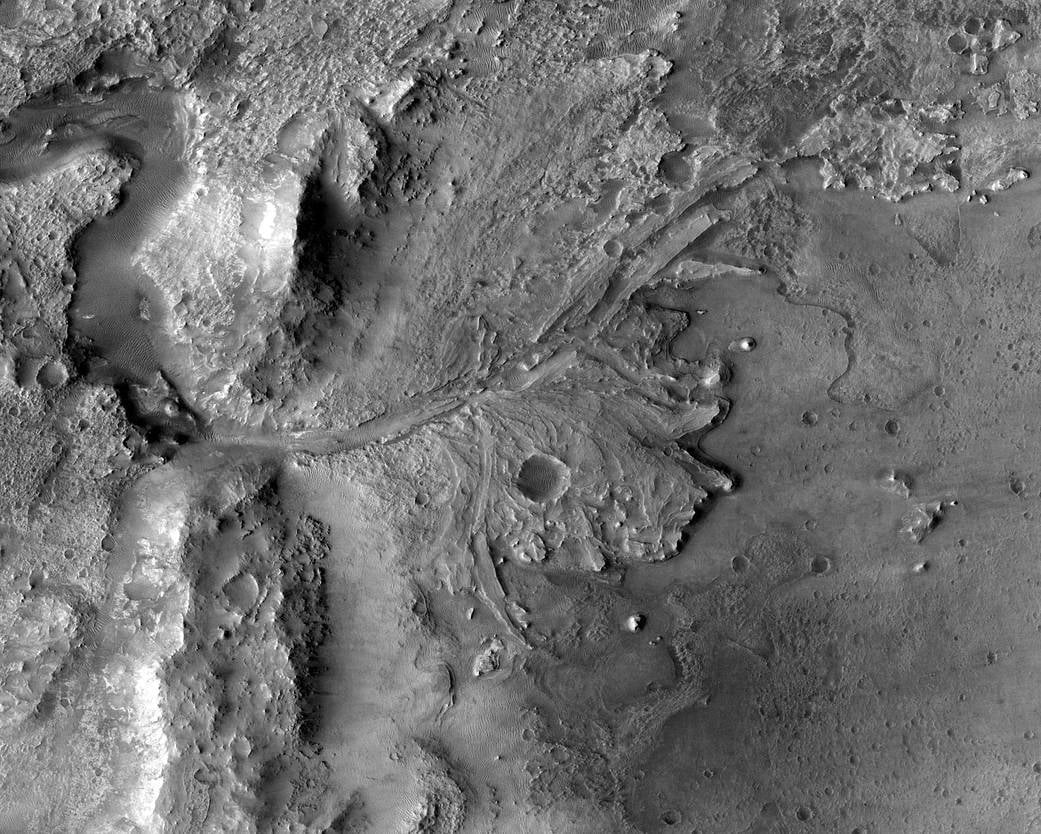
वैज्ञानिकों का मानना है कि जजेरो क्रेटर क्षेत्र कभी पानी से भरा हुआ था और वहां एक प्राचीन नदी डेल्टा था। वैज्ञानिकों को इस बात के प्रमाण मिले हैं कि पानी आसपास के क्षेत्र से मिट्टी के खनिजों को क्रेटर झील में ले आया। संभवतः, इनमें से एक या अधिक वर्षा काल के दौरान जेज़ेरो में सूक्ष्मजीवी जीवन रहा होगा। यदि ऐसा है, तो उनके अवशेषों के चिह्न झील के तल या तटरेखा के तलछट में पाए जा सकते हैं। वैज्ञानिक इस क्षेत्र के निर्माण और विकास का अध्ययन करेंगे, अतीत में जीवन के संकेत तलाशेंगे, तथा मंगल ग्रह की चट्टानों और मिट्टी के नमूने एकत्र करेंगे, जो इन संकेतों को संरक्षित कर सकें।
ग्रहीय भूविज्ञानी क्या है?
ग्रहीय भूविज्ञानी वह व्यक्ति होता है जो अध्ययन करता है कि खगोलीय पिंड (ग्रह, चंद्रमा, क्षुद्रग्रह, धूमकेतु और उल्कापिंड) समय के साथ कैसे बनते और विकसित होते हैं। वे पृथ्वी के बारे में जो कुछ हमने सीखा है उसका उपयोग यह समझने के लिए करते हैं कि अन्य खगोलीय पिंड कैसे काम करते हैं। ग्रहीय भूवैज्ञानिक ग्रहों की आंतरिक संरचना का निर्धारण करने जैसे विषयों का अध्ययन करते हैं, तथा ग्रहीय ज्वालामुखी जैसी सतही प्रक्रियाओं पर भी नजर रखते हैं। ग्रहीय भूवैज्ञानिकों को स्थलीय भूवैज्ञानिकों की तुलना में बहुत कम डेटा से काम चलाना पड़ता है। चूंकि वे स्वयं जानकारी एकत्र करने के लिए क्षेत्र में नहीं जा सकते, इसलिए उन्हें अधिकांशतः दूरस्थ आंकड़ों पर ही निर्भर रहना पड़ता है।
रोवर क्या है?
ग्रहीय भूवैज्ञानिक रोवर्स के साथ मिलकर भूभाग के बारे में जानकारी एकत्र करते हैं तथा चट्टानों, धूल, मिट्टी या यहां तक कि तरल पदार्थों के नमूने भी एकत्र करते हैं। रोवर एक ऐसा उपकरण है जिसे किसी ग्रह या अन्य खगोलीय पिंड (जैसे मंगल) की ठोस सतह पर घूमने के लिए डिज़ाइन किया गया है। चूंकि वैज्ञानिक इस समय स्वयं मंगल ग्रह पर नहीं जा सकते, इसलिए उन्हें चट्टानों और मिट्टी का विश्लेषण करने तथा उनके लिए डेटा एकत्र करने के लिए रोबोट भूवैज्ञानिकों - रोवर्स - पर निर्भर रहना पड़ता है।
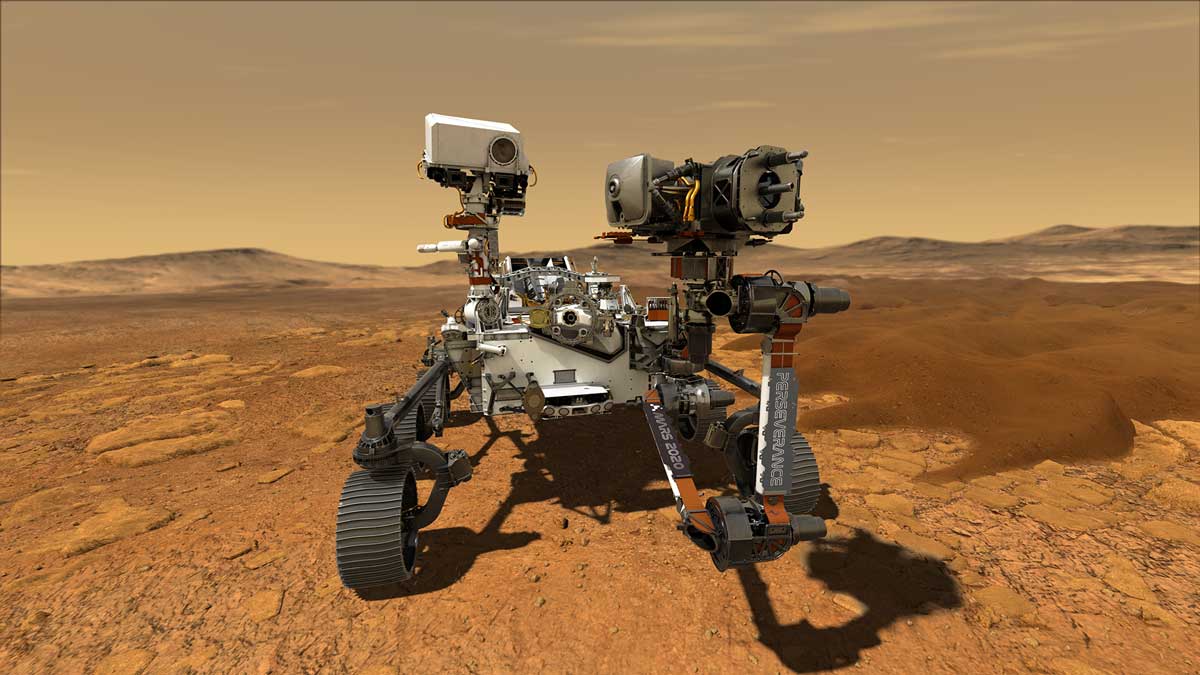
वर्तमान में, पर्सिवियरेंस रोवर नासा के मंगल 2020 मिशन को पूरा कर रहा है और पृथ्वी पर संभावित वापसी के लिए चट्टान और मिट्टी के नमूने एकत्र करेगा। अपना काम करने के लिए, पर्सिवियरेंस रोवर कई सेंसर और विज्ञान उपकरण ले जाएगा जो मंगल ग्रह की सतह पर चट्टानों और मिट्टी का विश्लेषण करेगा और अन्य महत्वपूर्ण कार्य और अध्ययन करेगा। मंगल 2020 मिशन के बारे में अधिक जानकारी और पर्सिवियरेंस रोवर की विशेषताओं के विवरण के लिए, की मंगल 2020 मिशन अवलोकन वेबसाइटदेखें।
सेंसर क्या है?
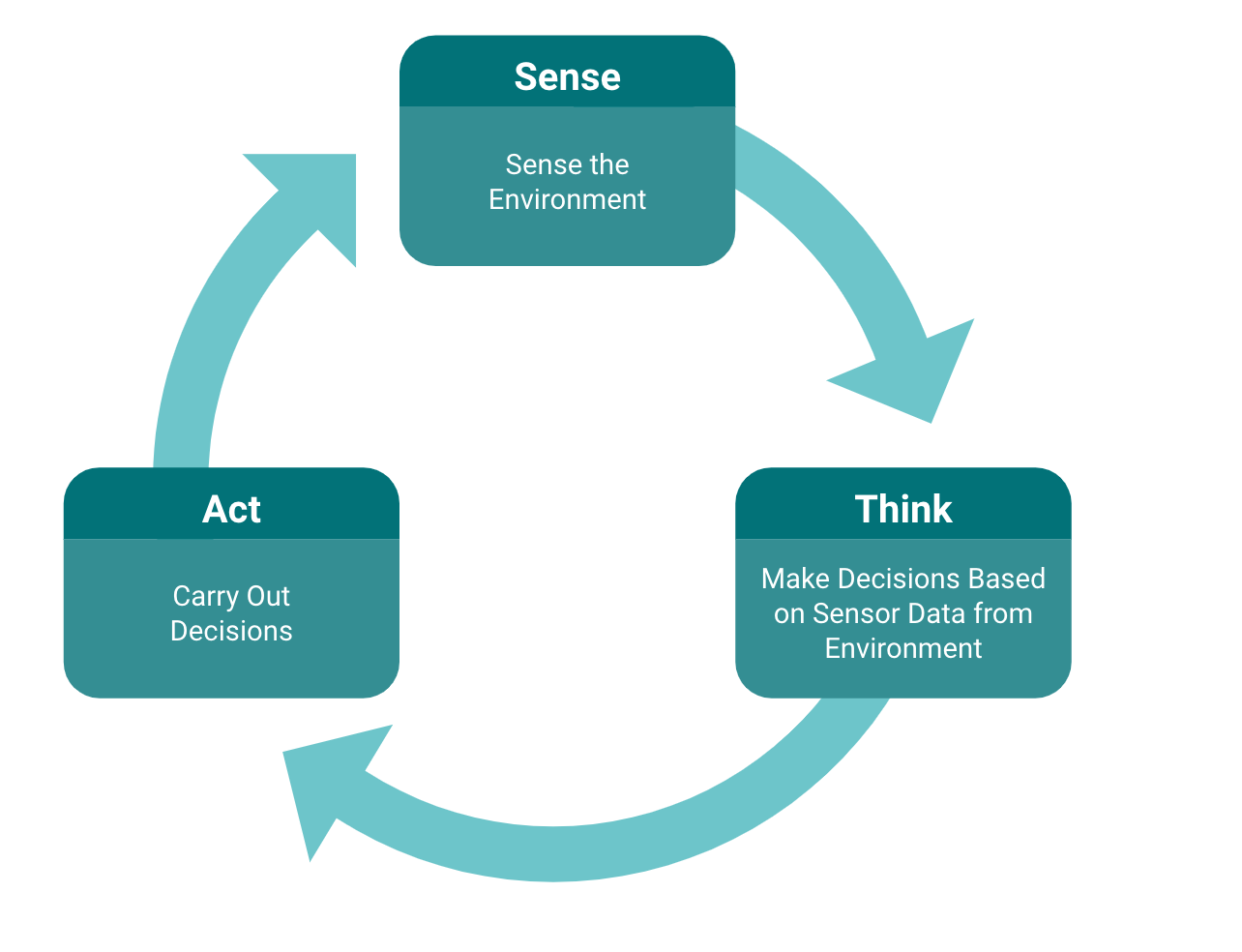
सेंसर, संक्षेप में, एक उपकरण है जो रोबोट को उसके आसपास की दुनिया को समझने में मदद करता है। यह अपने पर्यावरण के बारे में डेटा एकत्र करके और रिपोर्ट करके ऐसा करता है, जिसका उपयोग किसी परियोजना में रोबोट को निर्णय लेने या कुछ व्यवहार करने के लिए किया जा सकता है। इस अनुक्रम को "सेंस थिंक एक्ट" निर्णय लूप के रूप में सोचा जा सकता है।
इस इकाई में, कोड बेस इलेक्ट्रोमैग्नेट द्वारा उठाए गए डिस्क के रंग का पता लगाने के लिए आई सेंसर का उपयोग करेगा। नेत्र संवेदक और विद्युत चुंबक दोनों ही ऐसे संवेदक हैं जो कोड बेस को उसके वातावरण के साथ अंतःक्रिया करने और संवेदी, विचारशील, क्रियाशील निर्णय लूप को क्रियान्वित करने की अनुमति देते हैं। छात्रों द्वारा बनाए गए प्रोजेक्ट में, इलेक्ट्रोमैग्नेट डिस्क को उठाएगा और आई सेंसर डिस्क के रंग को पहचानेगा, फिर VEXcode GO डिस्क के रंग के आधार पर निर्णय लेने के लिए थिंक को आदेश देगा। इसके बाद, कोड बेस निर्दिष्ट स्थान पर ड्राइव करके और पहचाने गए रंग के आधार पर डिस्क को ड्रॉप करके कार्य करेगा।
विद्युत चुम्बक क्या है?
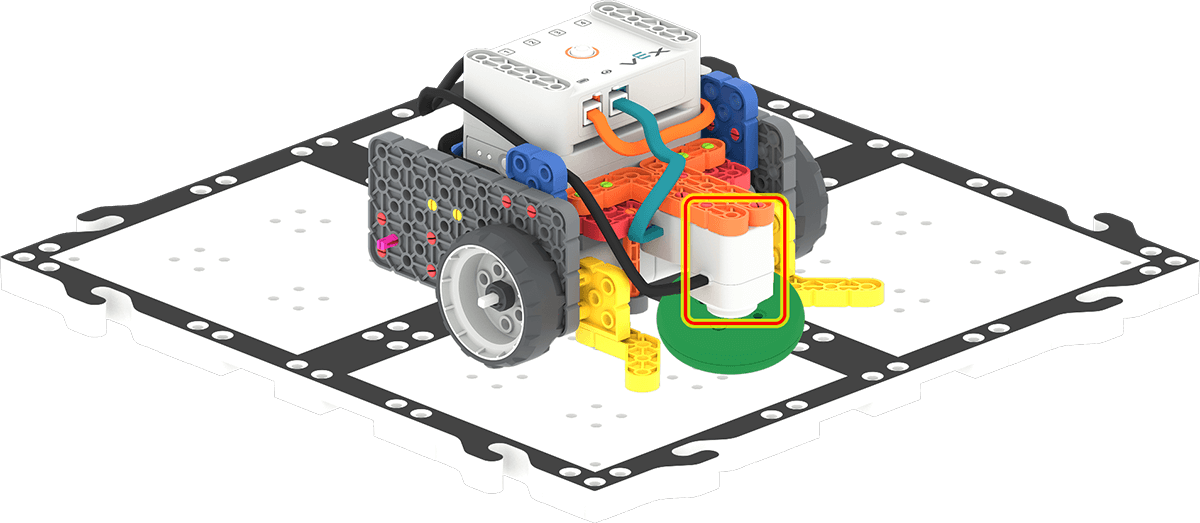
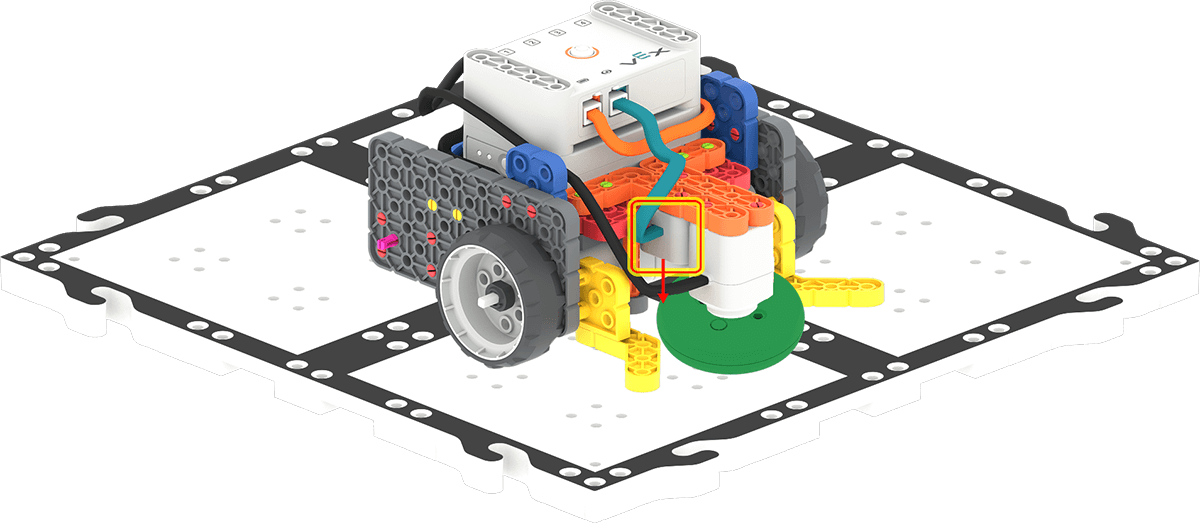
विद्युत चुम्बक एक प्रकार का चुम्बक है जिसमें विद्युत धारा द्वारा चुम्बकीय क्षेत्र उत्पन्न होता है। VEX GO इलेक्ट्रोमैग्नेट धातु कोर वाले डिस्क को उठा और नीचे रख सकता है। कोड बेस - आई + इलेक्ट्रोमैग्नेट बिल्ड में रोबोट के सामने इलेक्ट्रोमैग्नेट है।
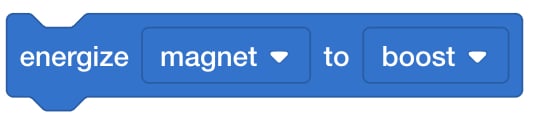
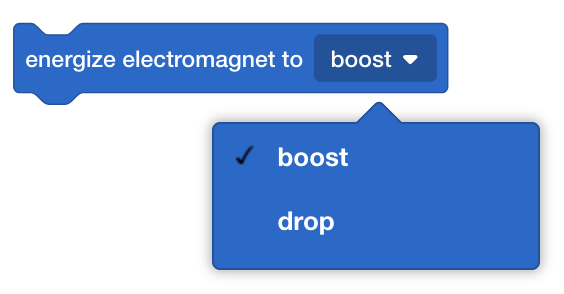
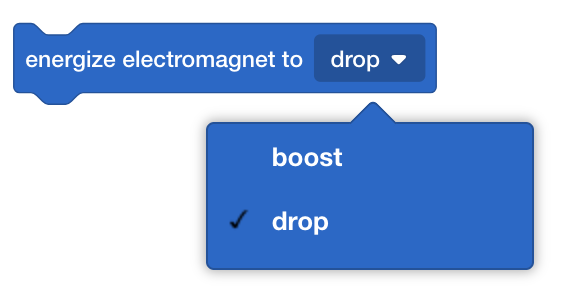
[एनर्जाइज़ इलेक्ट्रोमैग्नेट] ब्लॉक का उपयोग VEXcode GO में डिस्क को 'बूस्ट' और 'ड्रॉप' करने के लिए किया जाता है।
'बूस्ट' सेटिंग आपको डिस्क चुनने की अनुमति देती है।
'ड्रॉप' सेटिंग आपको डिस्क रिलीज़ करने की अनुमति देती है।
इलेक्ट्रोमैग्नेट का उपयोग करने के बारे में अधिक जानकारी के लिए, VEX GO इलेक्ट्रोमैग्नेट VEX लाइब्रेरी अनुच्छेदके साथ कोडिंग देखें।
नेत्र संवेदक क्या है?
नेत्र संवेदक एक ऐसा संवेदक है जो तीन चीजों का निर्धारण कर सकता है - किसी वस्तु की उपस्थिति, उसका रंग, तथा किसी वस्तु या सतह की चमक। कोड बेस - आई + इलेक्ट्रोमैग्नेट बिल्ड पर, आई सेंसर इलेक्ट्रोमैग्नेट के पीछे स्थित है, और नीचे की ओर इंगित है। इससे आई सेंसर को डिस्क के रंग का पता लगाने में मदद मिलेगी, ताकि उसे रंग के आधार पर वर्गीकृत किया जा सके। नेत्र सेंसर के विभिन्न उपयोगों के बारे में अधिक जानकारी के लिए, VEX GO नेत्र सेंसर VEX लाइब्रेरी अनुच्छेदके साथ कोडिंग देखें।
नेत्र संवेदक द्वारा रिपोर्ट किए गए डेटा को मॉनिटर कंसोल में देखा जा सकता है, जो छात्रों को रोबोट क्या देख रहा है, इसका एक दृश्य प्रतिनिधित्व प्रदान करता है, और इसका उपयोग सेंसर और रोबोट के व्यवहार के बीच संबंध बनाने में उनकी मदद करने के लिए किया जा सकता है। VEXcode GO में मॉनिटर कंसोल का उपयोग करने के बारे में अधिक जानकारी के लिए, यह VEX लाइब्रेरी आलेख देखें।
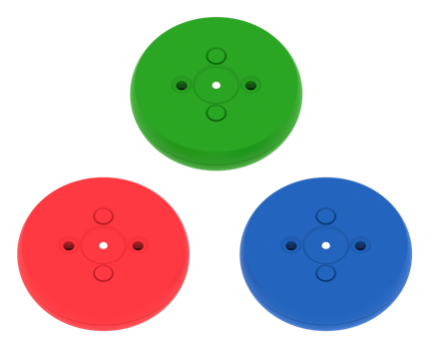
VEX GO डिस्क
इस यूनिट में उपयोग की जाने वाली डिस्क तीन अलग-अलग रंगों में आती हैं: हरा, लाल और नीला। डिस्क में धातु के कोर होते हैं और इन्हें इलेक्ट्रोमैग्नेट के साथ उपयोग किया जा सकता है। डिस्क का उपयोग रंग और वस्तु का पता लगाने के लिए नेत्र सेंसर के साथ भी किया जा सकता है। इलेक्ट्रोमैग्नेट या डिस्क के बारे में अधिक जानकारी के लिए, VEX लाइब्रेरी में लिंक किए गए इंटरैक्टिव पार्ट्स पोस्टर को
सड़न
विघटन में जटिल समस्या को ऐसे व्यवहारों में तोड़ना शामिल है जो अधिक प्रबंधनीय और समझने में आसान हों। समस्या को छोटे-छोटे भागों में विभाजित करने का अर्थ है कि प्रत्येक भाग की अधिक विस्तार से जांच की जा सकती है तथा उसे अधिक आसानी से हल किया जा सकता है। उदाहरण के लिए, यदि कोई छात्र चाहता है कि उसका रोबोट एक वर्ग में घूमे, तो उसे इसे छोटे-छोटे आदेशों में तोड़ना होगा। छात्रों के लिए विखंडन प्रक्रिया को परिष्कृत करना अभ्यास के लिए महत्वपूर्ण है, क्योंकि हो सकता है कि वे पहले आदेशों को छोटे घटकों में नहीं तोड़ पाएं:
| वर्गाकार विखंडन में आगे बढ़ें 1 | वर्गाकार विखंडन में आगे बढ़ें 2 | वर्गाकार विखंडन में आगे बढ़ें 3 |
|---|---|---|
|
|
|
छद्म कोड
स्यूडोकोड कोडिंग के लिए एक संक्षिप्त संकेतन है जो कोड के मौखिक और लिखित विवरणों को जोड़ता है।
अक्सर, छात्र समाधान खोजने के लिए "अनुमान लगा सकते हैं और जांच" कर सकते हैं। हालाँकि, इससे उन्हें कोडिंग अवधारणाओं की वैचारिक समझ विकसित करने में मदद नहीं मिलती। स्यूडोकोड लिखने से छात्रों को कोडिंग की सतही समझ से आगे बढ़कर अधिक वैचारिक समझ विकसित करने में मदद मिलती है। स्यूडोकोड के लिए आवश्यक है कि विद्यार्थी कोडिंग शुरू करने से पहले अपने कोडिंग समाधान के बारे में संकल्पनात्मक रूप से सोचें। शिक्षकों को छात्रों से छद्मकोड पर चर्चा करते हुए निम्नलिखित प्रश्न पूछने चाहिए:
- वे अपनी परियोजना से क्या हासिल करना चाहते हैं?
- आप परियोजना के उद्देश्य या लक्ष्य को संक्षिप्त विशिष्ट कथनों में कैसे विभाजित करेंगे?
इस उदाहरण में, यदि विद्यार्थियों से रोबोट को आगे बढ़ने, दीवार का पता लगाने, दाईं ओर मुड़ने और फिर से आगे बढ़ने के लिए छद्म कोड बनाने को कहा जाए, तो यह निम्नलिखित होगा:
- रोबोट को तब तक आगे की ओर ले जाएं जब तक वह दीवार से 50 मिमी दूर न हो जाए
- रोबोट को रोकें
- रोबोट को 90 डिग्री घुमाएँ
- रोबोट को रोकें
- 600 मिमी आगे ड्राइव करें
एक बार छद्म कोड तैयार हो जाने के बाद, छात्र रोबोट को निर्देश देने के लिए कोड तैयार करेंगे कि उनके छद्म कोड के प्रत्येक चरण को सफलतापूर्वक कैसे पूरा किया जाए। स्यूडोकोड के साथ काम करने के तरीके के बारे में अधिक जानकारी के लिए VEXcode GO में स्यूडोकोड ट्यूटोरियल देखें।
VEXcode GO क्या है?
VEXcode GO एक कोडिंग वातावरण है जिसका उपयोग VEX GO रोबोट के साथ संचार करने के लिए किया जाता है। छात्र VEXcode GO प्रोजेक्ट बनाने के लिए ड्रैग और ड्रॉप इंटरफ़ेस का उपयोग करते हैं जो उनके रोबोट की गतिविधियों को नियंत्रित करते हैं। प्रत्येक ब्लॉक का उद्देश्य उसके आकार, रंग और लेबल जैसे दृश्य संकेतों का उपयोग करके पहचाना जा सकता है। VEXcode GO के साथ काम करने के तरीके के बारे में अधिक जानकारी के लिए, VEX लाइब्रेरीका VEXcode GO अनुभाग देखें।
VEXcode GO में ब्लॉक रोबोट कमांड का प्रतिनिधित्व करते हैं जिनका उपयोग VEXcode GO में प्रोजेक्ट बनाने के लिए किया जाता है। इस इकाई के दौरान उपयोग किये गये मुख्य ब्लॉकों की सूची नीचे दी गई है। ब्लॉक आकृतियों और उनके अर्थ के बारे में अधिक जानकारी के लिए, GO VEX लाइब्रेरी लेखमें ब्लॉक आकृतियों को समझना देखें। आप मेरे ब्लॉक्स और उन्हें किसी प्रोजेक्ट में कैसे उपयोग करें, इस बारे में अतिरिक्त जानकारी VEXcode GO VEX लाइब्रेरी में मेरे ब्लॉक्स का उपयोग करना लेखपा सकते हैं।
| VEXcode GO ब्लॉक | व्यवहार |
|---|---|
 |
जब परियोजना शुरू होती है तो {When started} ब्लॉक, ब्लॉकों के संलग्न स्टैक को चलाना शुरू कर देता है। |
 |
[ड्राइव] ब्लॉक ड्राइवट्रेन को एक निश्चित दूरी तक ले जाता है। |
 |
[टर्न फॉर] ब्लॉक ड्राइवट्रेन को एक निश्चित दूरी तक घुमाता है। |
 |
[यदि तो] ब्लॉक एक 'सी' ब्लॉक है जो बूलियन स्थिति के सत्य होने पर अंदर के ब्लॉकों को चलाता है। |
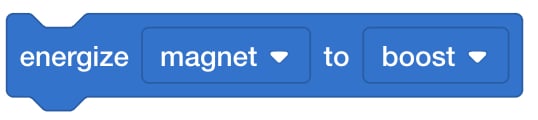 |
[एनर्जाइज़ इलेक्ट्रोमैग्नेट] ब्लॉक VEX GO इलेक्ट्रोमैग्नेट को दो अलग-अलग मोड पर सेट करता है: बूस्ट या ड्रॉप। |
 |
<Detects color> ब्लॉक रिपोर्ट करता है कि क्या नेत्र संवेदक किसी वस्तु का निर्दिष्ट रंग पहचानता है। |
 |
मेरे ब्लॉक (परिभाषा) का उपयोग ब्लॉकों के ढेर को परिभाषित करने के लिए किया जाता है। |
 |
माई ब्लॉक्स (कमांड) ब्लॉक का उपयोग परिभाषित ब्लॉकों को निष्पादित करने के लिए किया जाता है। |
 |
[टिप्पणी] ब्लॉक आपको यह बताने में मदद करने के लिए जानकारी लिखने की अनुमति देता है कि आप अपनी परियोजना में क्या चाहते हैं। |
माई ब्लॉक्स कैसे काम करते हैं?
मेरे ब्लॉक का उपयोग ब्लॉकों का एक क्रम बनाने के लिए किया जाता है जिसका उपयोग पूरे प्रोजेक्ट में कई बार किया जा सकता है। हर बार एक ही अनुक्रम को पुनः बनाने के बजाय, ब्लॉकों के अनुक्रम को एक एकल ब्लॉक में समूहित करना आसान होता है। माई ब्लॉक बनाकर, आपको केवल एक बार अनुक्रम बनाने की आवश्यकता होगी, और फिर आप इसका पुनः उपयोग कर सकते हैं। इससे लंबी परियोजनाओं को विभाजित करने में मदद मिलेगी, जिससे उन पर काम करना आसान हो जाएगा। किसी प्रोजेक्ट में माई ब्लॉक्स का उपयोग कैसे करें, यह जानने के लिए नीचे दिया गया वीडियो देखें। निम्नलिखित ट्यूटोरियल वीडियो VEXcode GO में उपलब्ध है और यह दर्शाता है कि किसी प्रोजेक्ट में My Blocks का उपयोग कैसे किया जाए। यह वीडियो लैब 4 में भी एम्बेड किया गया है ताकि आप इसे अपने छात्रों के साथ साझा कर सकें। (आप और आपके छात्र किसी भी समय VEXcode GO में इस वीडियो और सभी VEXcode GO ट्यूटोरियल तक पहुंच सकते हैं।)
मेरे ब्लॉक का उपयोग करने के बारे में अधिक जानकारी के लिए, VEXcode GO VEX लाइब्रेरी लेखमें मेरे ब्लॉक का उपयोग करना देखें।
इस इकाई में ओपन-एंडेड चुनौती की तैयारी
इस इकाई में, विद्यार्थियों से कहा जाएगा कि वे किसी चुनौती को हल करने के लिए एक परियोजना बनाने हेतु पहले से सीखी गई बातों का उपयोग करें। चूंकि छात्रों को समस्या-समाधान के लिए नियमित रूप से चुनौती देना और उनके द्वारा सीखे गए कौशल को नए तरीके से लागू करना महत्वपूर्ण है, इसलिए हम आपको अपने छात्रों को चुनौती देने और लचीलापन बनाने के लिए इन रणनीतियों का उपयोग करने और लैब गतिविधियों के माध्यम से उनका मार्गदर्शन करने के लिए प्रोत्साहित करते हैं। छात्रों को अपनी परियोजनाओं के साथ प्रयोग करने में मदद करने के लिए यहां कुछ सुझाव दिए गए हैं:
समाधान दिए बिना प्रतिक्रिया दें - किसी चुनौती से निपटते समय गलतियाँ करना अपेक्षित है और इसे प्रोत्साहित किया जाता है। "सीखने में गलतियाँ अवसर पैदा कर सकती हैं, [और] संबंधों को समझने में मदद कर सकती हैं।"2 अपने छात्रों के साथ एक परिचित समस्या-समाधान प्रक्रिया बनाने से उन्हें यह सीखने में मदद मिल सकती है कि किसी समस्या की पहचान कैसे करें और जब वे कोई गलती करते हैं तो आगे बढ़ें, जिससे व्यवधान और हताशा को कम किया जा सके। अपने विद्यार्थियों के साथ निम्नलिखित समस्या-समाधान चक्र का उपयोग करने का प्रयास करें, जिससे उन्हें अपनी परियोजनाओं का निवारण करने तथा स्वयं समाधान निकालने में सहायता मिले।

- समस्या का वर्णन करें
- छात्र से पूछें कि क्या गलत है। छात्रों को त्रुटि को साझा लक्ष्य या चुनौती से जोड़ने में सक्षम होना चाहिए।
- उनके प्रोजेक्ट में कोड बेस किस प्रकार आगे बढ़ रहा है? रोबोट को किस प्रकार चलना चाहिए?
- छात्र से पूछें कि क्या गलत है। छात्रों को त्रुटि को साझा लक्ष्य या चुनौती से जोड़ने में सक्षम होना चाहिए।
- पहचानें कि समस्या कब और कहाँ शुरू हुई
- छात्र से पूछें कि उन्होंने पहली बार समस्या कब देखी।
- परियोजना का कौन सा भाग क्रियान्वित किया जा रहा था?
- यदि छात्रों को यह निर्धारित करने में कठिनाई हो रही है कि परियोजना में त्रुटि कहां है, तो उन्हें VEXcode GO में प्रोजेक्ट स्टेपिंग सुविधा का उपयोग करने के लिए प्रोत्साहित करें। प्रोजेक्ट स्टेपिंग सुविधा के साथ प्रदान किए गए दृश्य संकेतों का उपयोग छात्रों को एक समय में एक ब्लॉक को निष्पादित होते देखने की क्षमता प्रदान करके उनके प्रोजेक्ट की समस्या निवारण में मदद करने के लिए किया जा सकता है। इससे उन्हें यह बेहतर ढंग से पता चल जाएगा कि कौन से ब्लॉक त्रुटि का कारण बन रहे हैं, जिससे डिबगिंग एक अधिक लक्षित और कुशल प्रक्रिया बन सकती है। प्रोजेक्ट स्टेपिंग सुविधा का उपयोग करने के तरीके के बारे में अधिक जानकारी के लिए, VEXcode GO VEX लाइब्रेरी लेख में प्रोजेक्ट के माध्यम से स्टेपिंग देखें।
- छात्र से पूछें कि उन्होंने पहली बार समस्या कब देखी।
- & परीक्षण संपादन करें
- जैसे ही छात्रों को कोई त्रुटि दिखे, उन्हें अपने प्रोजेक्ट में संपादन कर लेना चाहिए। छात्र प्रत्येक संपादन के साथ परियोजना का परीक्षण कर सकते हैं। यदि परियोजना सफल होती है, तो वे समस्या-समाधान चक्र में अगले चरण पर आगे बढ़ सकते हैं। यदि परियोजना सफल नहीं होती है, तो वे प्रक्रिया की शुरुआत में वापस जा सकते हैं और पुनः प्रयास कर सकते हैं।
- प्रतिबिंबित होना
- विद्यार्थियों से कहें कि वे इस प्रक्रिया के दौरान की गई गलती और उससे उबरने के बारे में सोचें।
- गलती क्या थी? इस गलती से आपने क्या सीखा? अगली बार कोड बेस को कोड करते समय यह आपकी किस प्रकार सहायता कर सकता है?
- विद्यार्थियों को अपनी गलतियों को पहचानने तथा इस प्रक्रिया से उन्होंने जो सीखा है उसे बताने के लिए प्रोत्साहित करें, ताकि विकास की मानसिकता को बढ़ावा मिल सके। विकास की मानसिकता पर ज़ोर देने से छात्रों को यह सीखने में मदद मिल सकती है कि कब और कैसे दृढ़ रहना है और कब मदद मांगनी है।3 यदि छात्र अपनी प्रक्रिया को नए सीखने के अग्रदूत के रूप में देख सकते हैं, तो वे अपने स्वयं के सीखने के साथ-साथ अपने सहपाठियों के सीखने को आगे बढ़ाने के लिए यहां दिए गए चरणों का उपयोग कर सकते हैं। जब विद्यार्थी इन मुद्दों से रूबरू हों और अपनी गलतियों पर विचार करें, तो उन्हें अपनी गलतियों और प्रक्रिया को साथी विद्यार्थियों के साथ साझा करने के लिए प्रोत्साहित करें। इस तरह, छात्र “एक दूसरे के लिए सीखने के संसाधन” बन सकते हैं।4
- विद्यार्थियों से कहें कि वे इस प्रक्रिया के दौरान की गई गलती और उससे उबरने के बारे में सोचें।
विद्यार्थियों को अनुमान लगाने और जांचने से आगे बढ़ने में सहायता करें - सबसे पहले, विद्यार्थी अपने प्रोजेक्ट में विभिन्न ब्लॉकों के साथ प्रयोग करने के लिए अनुमान लगाएंगे और जांच करेंगे, लेकिन आप चाहेंगे कि वे प्रोजेक्ट के लक्ष्य के आधार पर चुनाव करना शुरू करें। विद्यार्थियों से कहें कि वे आपको अपने प्रोजेक्ट का लक्ष्य समझाएं और फिर पूछें कि उनके प्रोजेक्ट में क्या-क्या है जो उस लक्ष्य की ओर काम कर रहा है, क्या कमी है और क्यों है। विद्यार्थियों को संकल्पनात्मक स्तर से एक प्रोजेक्ट बनाने के लिए प्रोत्साहित करना कि वे रोबोट से क्या करवाना चाहते हैं और क्यों, इससे उन्हें अनुमान लगाने और जांचने से आगे बढ़ने तथा उद्देश्यपूर्ण कोडिंग शुरू करने में मदद मिलेगी।
इस इकाई की प्रयोगशाला 3 और 4 में ऐसी गतिविधियां शामिल हैं जो अन्वेषणात्मक हैं और आपके विद्यार्थियों से चुनौती को हल करने के लिए दृढ़ता से प्रयास करने को कहेंगी। छात्रों को ड्राइवट्रेन ब्लॉकों में पैरामीटर बदलने होंगे और डिस्क को उनके रंग के आधार पर अलग-अलग क्षेत्रों में एकत्रित करने और वितरित करने के लिए माई ब्लॉक बनाने होंगे। डिस्कों को एकत्रित करने और क्रमबद्ध करने के लिए उनकी परियोजनाओं के कई पुनरावृत्तियों की आवश्यकता हो सकती है। इस अनुभाग में दिए गए सुझावों का उपयोग करके विद्यार्थियों को परीक्षण और त्रुटि प्रक्रिया के लिए तैयार करें, तथा चुनौती के लक्ष्य को प्राप्त करने के लिए उनकी परियोजनाओं के समस्या निवारण में उनकी सहायता करें। प्ले भाग 1 और 2 के सुविधा अनुभाग में इन लैब चुनौतियों के माध्यम से छात्रों को मार्गदर्शन देने के लिए अतिरिक्त अनुदेशात्मक सहायता शामिल है। इस प्रयोगशाला में आवश्यक समस्या-समाधान और परीक्षण एवं त्रुटि के लिए आप किस प्रकार सहायता प्रदान करेंगे, इसकी योजना बनाने से आपको अपने विद्यार्थियों की व्यक्तिगत आवश्यकताओं को पूरा करने में सहायता मिल सकती है।
STEM लैब्स में लचीलापन बनाना VEX लाइब्रेरी लेख देखें, अधिक जानकारी के लिए कि कैसे प्रभावी फीडबैक STEM लैब्स में काम करते समय छात्रों को लचीलापन और विकास की मानसिकता बनाने में मदद कर सकता है।
1 नासा, मंगल 2020 मिशन अवलोकन, https://mars.nasa.gov/mars2020/mission/overview/, 2021.
2 हैटी, जॉन, और शर्ली क्लार्क। दृश्यमान शिक्षा: प्रतिक्रिया. रूटलेज, & फ्रांसिस ग्रुप, 2019.
3 वही.
4 वही, पृ. 121