
Pelajaran 3: Alur Proyek dengan Beberapa Perulangan While
Sekarang setelah Anda membuat proyek teks untuk menavigasi Robot VR ke huruf 'A' di Wall Maze Playground, Anda akan memperluas keterampilan Anda menggunakan kondisi dan nilai sensor. Dalam Pelajaran ini, Anda akan menavigasi Robot VR ke angka '2' di Wall Maze Playground, lalu menjelajahi mengapa perintah tambahan diperlukan untuk mencapai huruf 'B.' Dalam tantangan mini, Anda akan menerapkan keterampilan ini untuk menavigasi dari awal Wall Maze hingga angka '3.'
Hasil belajar
- Jelaskan alur program dalam proyek yang memiliki Robot VR yang bergerak maju hingga Sensor Bumper ditekan.
Ganti Nama Proyek
- Jika proyek Pelajaran sebelumnya belum dimuat, muat proyek Unit4Lesson2.
-
Ubah nama proyek Unit4Lesson3.

Alur Proyek untuk Menuju Huruf 'A'
Pada pelajaran sebelumnya, Robot VR melaju ke huruf 'A' di Wall Maze Playground. Mari kita uraikan alur proyek saat kita bersiap menavigasi ke lokasi baru di Wall Maze.

-
Untuk lebih memahami alur proyek untuk mencapai huruf 'A' di Wall Maze Playground, mulailah dengan memodifikasi proyek Anda sebelumnya atau buat proyek baru yang sesuai dengan proyek dasar ini.
def main(): sementara tidak ada bemper kiri.ditekan(): drivetrain.berkendara(MAJU) tunggu(5, MSEC) drivetrain.berbelok_ke_KIRI(90, DERAJAT) sementara tidak ada bemper kiri.ditekan(): drivetrain.berkendara(MAJU) tunggu(5, MSEC) drivetrain.berbelok_ke_KIRI(90, DERAJAT) sementara tidak ada bemper kiri.ditekan(): drivetrain.berkendara(MAJU) tunggu(5, MSEC) drivetrain.berhenti() - Ketika suatu proyek menggunakan perulangan whiledengan kondisi not , alur program proyek tersebut masih mengikuti urutan atas-ke-bawah yang sama. Perulangan whilememungkinkan aliran program untuk "berhenti" pada titik tertentu, saat suatu kondisi terpenuhi. Operatorbukanmemungkinkan proyek tetap dalam lingkaran hingga kondisi dilaporkan Salah. Kemudian proyek akan mengalir ke perintah berikutnya di luar loop. Kondisi Boolean, seperti Bumper Kiri ditekan, akan melaporkan nilai Benar atau Salah. Dalam kode ini untuk menggerakkan Robot VR ke huruf 'A', Robot VR akan bergerak maju hingga kondisi Boolean Bumper Kiri ditekan, bernilai Benar.
Alur proyek untuk menggerakkan ke Huruf 'A' akan terlihat seperti ini: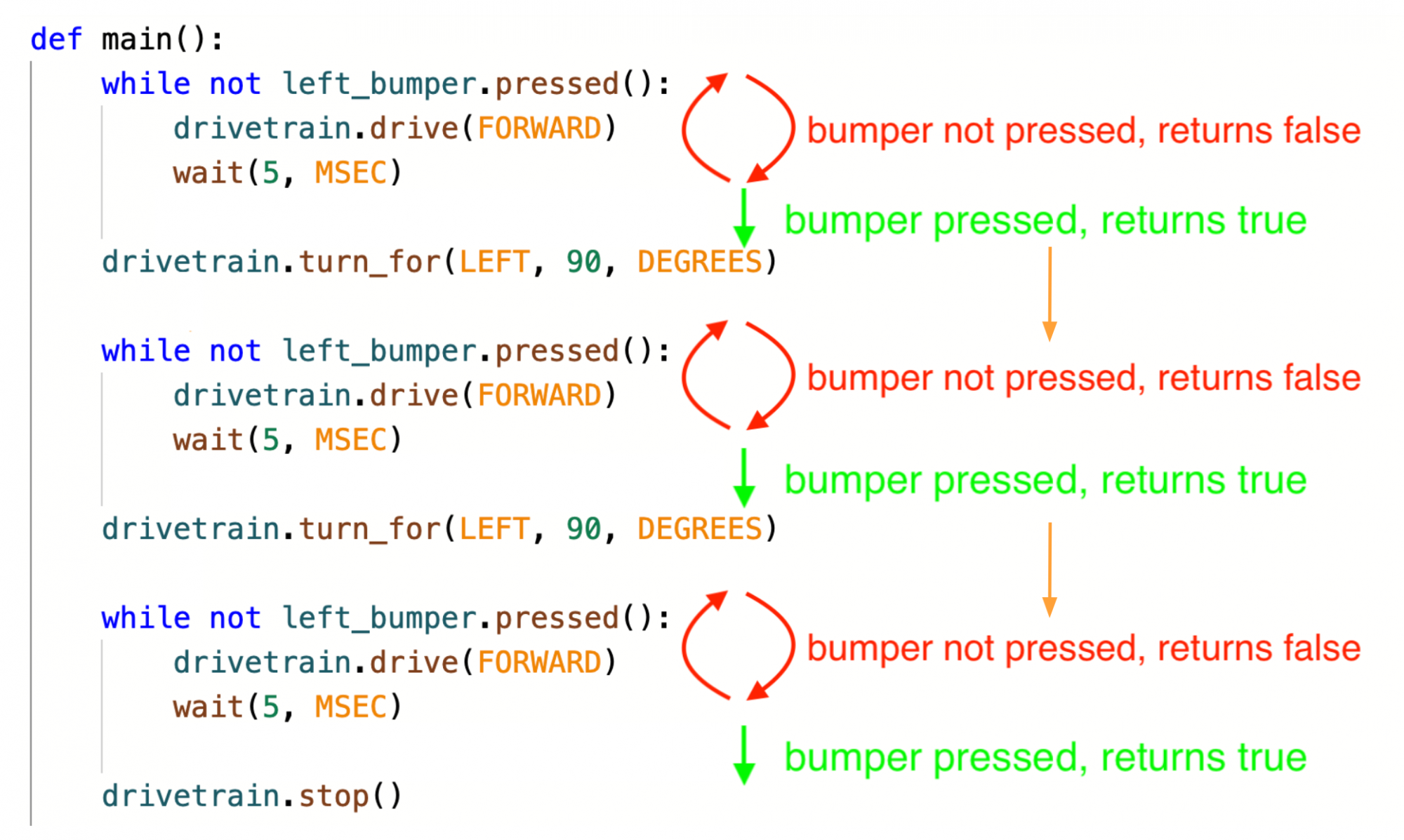
Perilaku Robot VR menunjukkan bagaimana setiap loopsementaradieksekusi. Jika diuraikan bersama dengan pergerakan Robot VR, kita dapat melihat dengan jelas ke mana Robot VR telah bergerak setelah setiap putaransementaradalam proyek dieksekusi.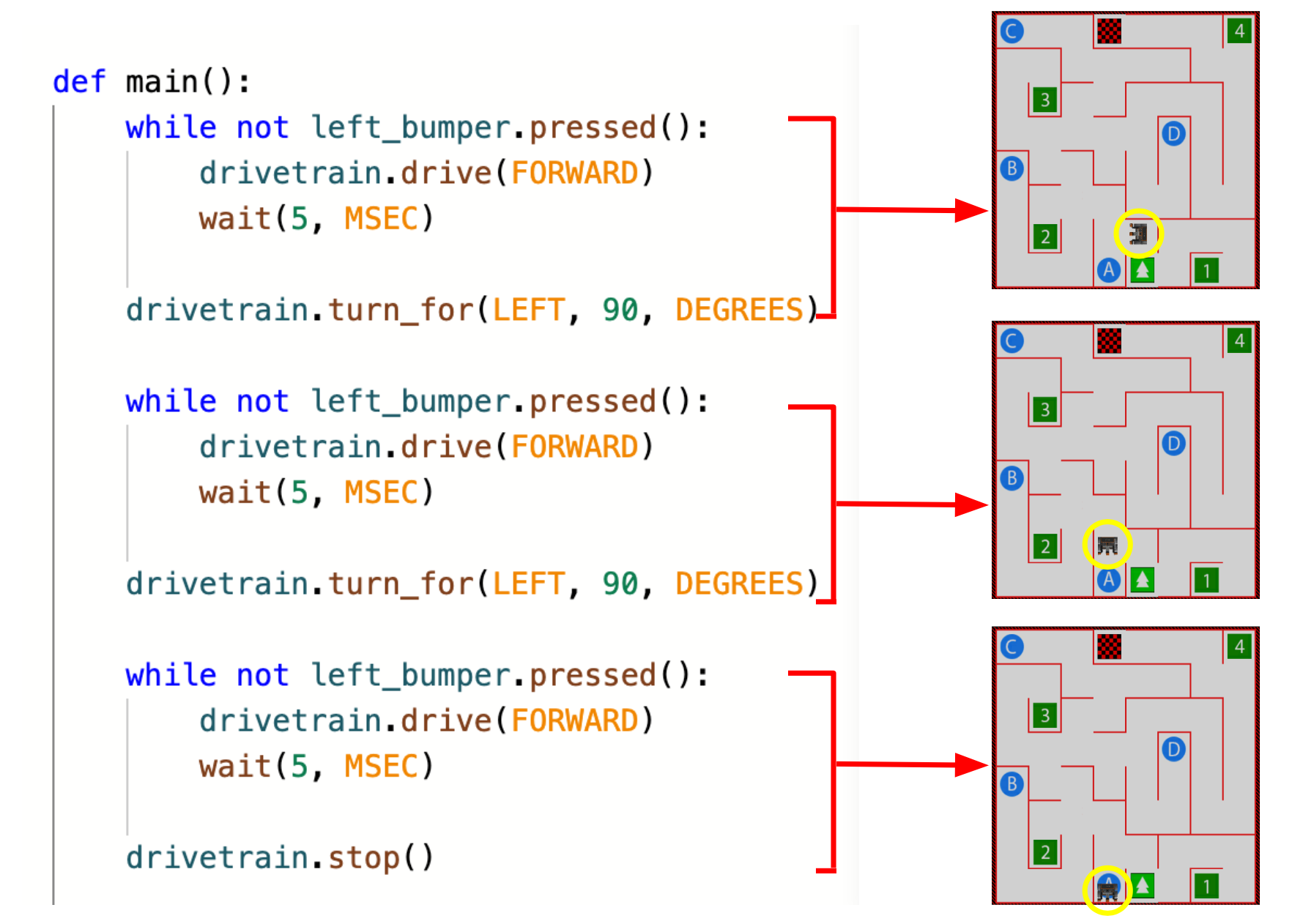
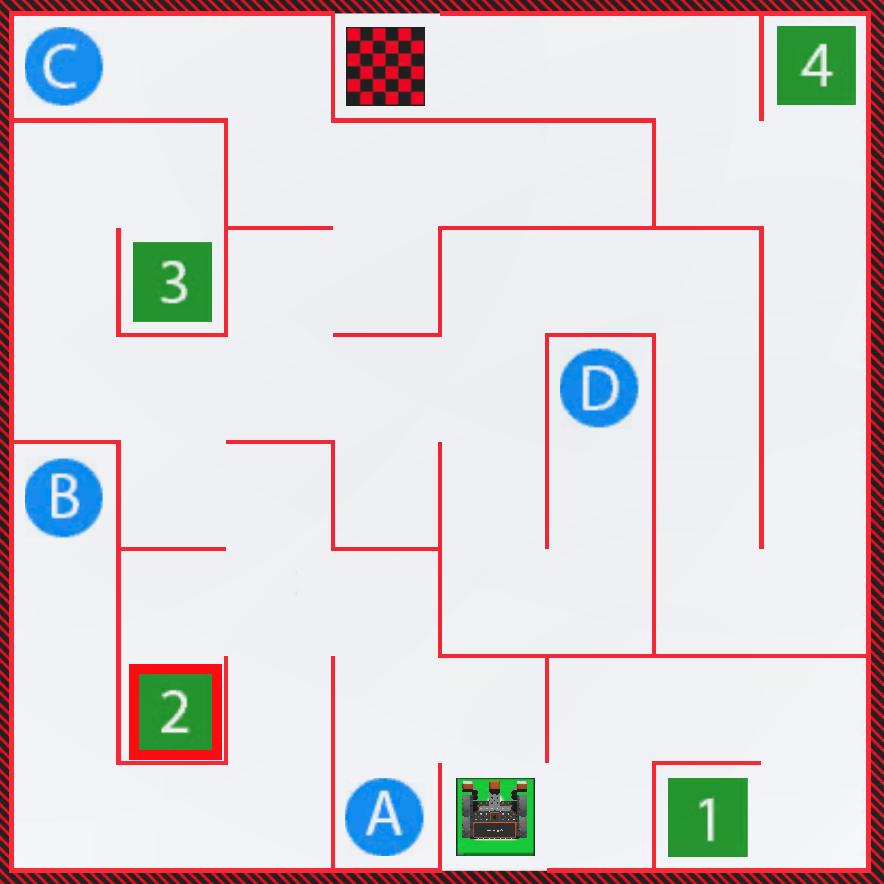
Berkendara ke Nomor '2'
Dalam Pelajaran ini, proyek akan diedit agar Robot VR melaju ke angka '2' di Dinding Labirin Taman Bermain!
-
Proyek dari Pelajaran 2 membuat Robot VR berbelok ke kiri untuk melaju ke huruf 'A'. Untuk menavigasi ke angka '2,' Robot VR harus berbelok ke kanan, melaju ke depan, lalu berbelok ke kiri.
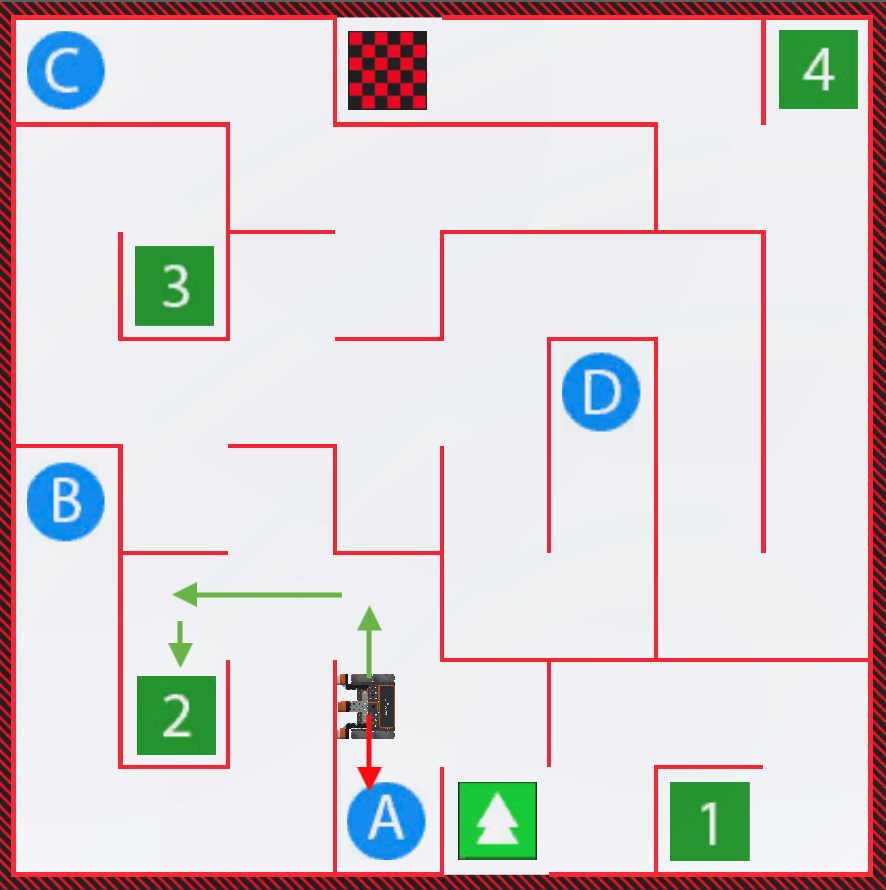
-
Ubah arah perintah turn_forkedua ke kanan, bukan ke kiri. Proyek Anda sekarang akan terlihat seperti ini:
def main(): sementara tidak ada bemper kiri.ditekan(): drivetrain.berkendara(MAJU) tunggu(5, MSEC) drivetrain.belok_untuk(KIRI, 90, DERAJAT) sementara tidak ada bemper kiri.ditekan(): drivetrain.berkendara(MAJU) tunggu(5, MSEC) drivetrain.belok_untuk(KANAN, 90, DERAJAT) sementara tidak ada bemper kiri.ditekan(): drivetrain.berkendara(MAJU) tunggu(5, MSEC) drivetrain.berhenti() - Luncurkan Wall Maze Playground jika belum terbuka dan jalankan proyeknya.
-
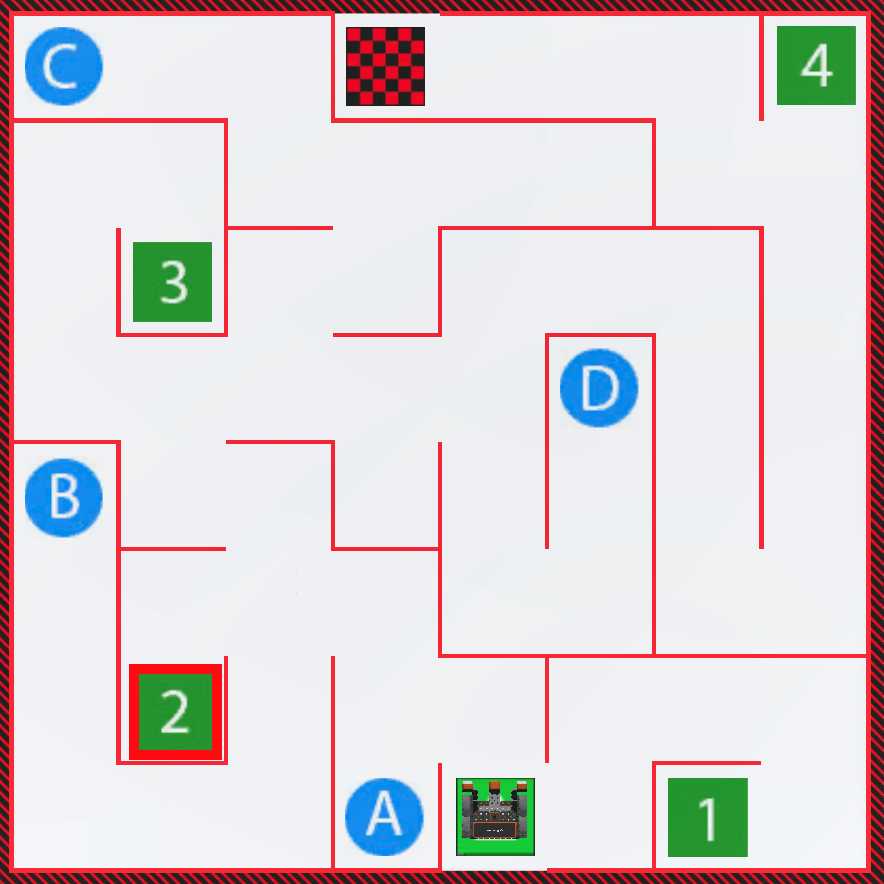
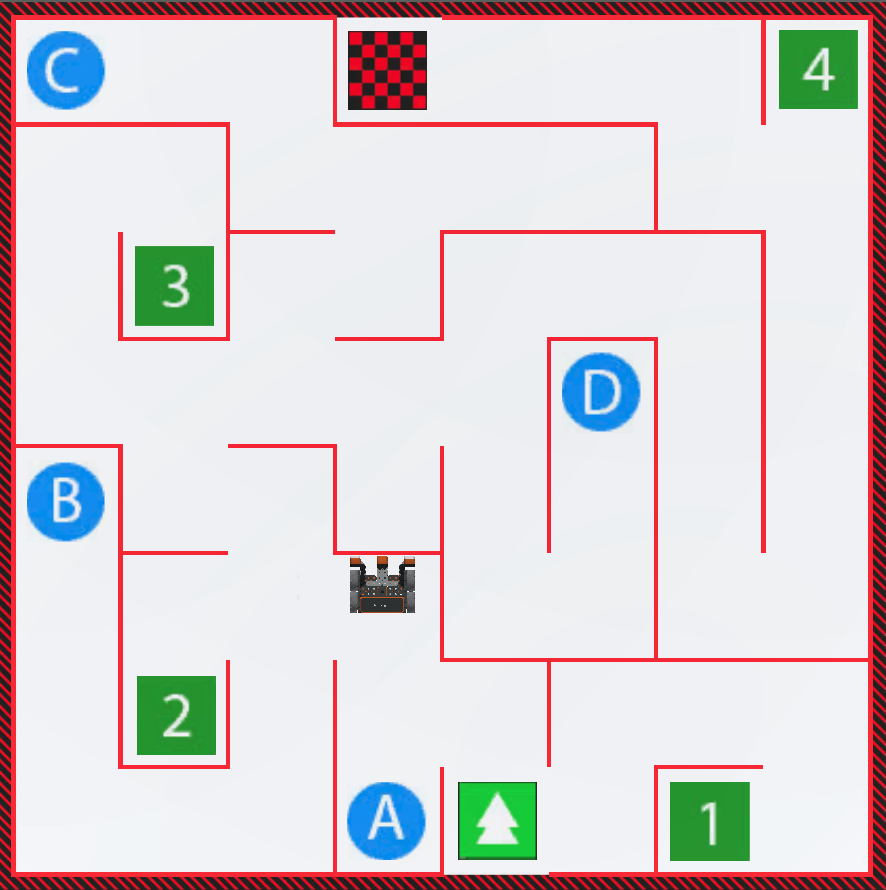
Saksikan Robot VR mulai melaju ke angka '2,' tetapi berhenti di dinding. Oleh karena itu, Robot VR perlu berbelok ke kiri setelah menekan dinding, bukannya berhenti.
-
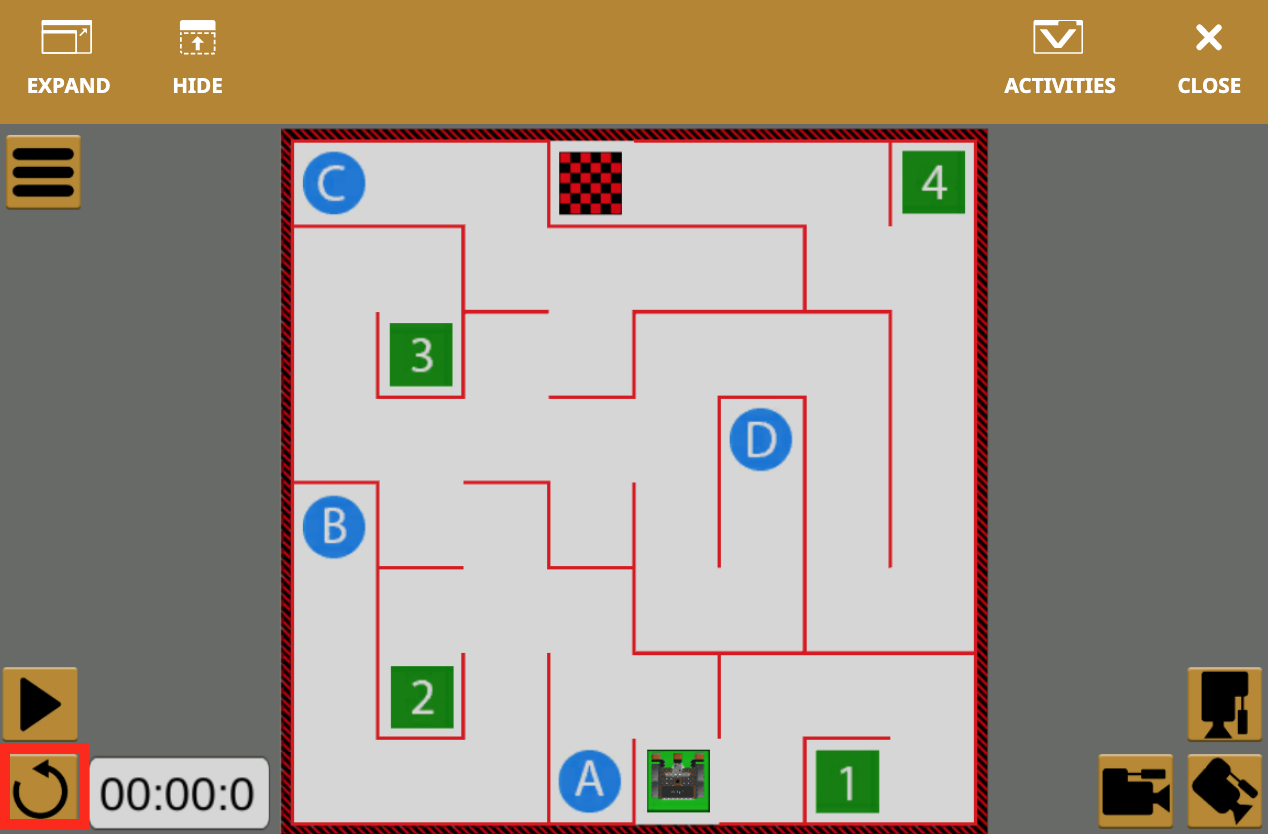
Pilih tombol “Reset” untuk mengatur ulang Playground dan mengembalikan Robot VR ke posisi awal.
-
Edit kode dengan menghapus perintah stop dan menggantinya dengan perintah berikut untuk mengarahkan Robot VR ke angka '2.'
def main(): sementara tidak ada bemper_kiri.ditekan(): drivetrain.berkendara(MAJU) tunggu(5, MSEC) drivetrain.berbelok_ke(KIRI, 90, DERAJAT) sementara tidak ada bemper_kiri.ditekan(): drivetrain.berkendara(MAJU) tunggu(5, MSEC) drivetrain.berbelok_ke(KANAN, 90, DERAJAT) sementara tidak ada bemper_kiri.ditekan(): drivetrain.berkendara(MAJU) tunggu(5, MSEC) drivetrain.berbelok_ke(KIRI, 90, DERAJAT) sementara tidak ada bemper_kiri.ditekan(): drivetrain.berkendara(MAJU) tunggu(5, MSEC) drivetrain.berbelok_ke(KIRI, 90, DERAJAT) sementara tidak bemper kiri.ditekan(): drivetrain.berkendara(MAJU) tunggu(5, MSEC) drivetrain.berhenti() - Luncurkan Wall Maze Playground jika belum terbuka dan jalankan proyeknya.
-
Saksikan Robot VR melaju ke angka '2' di Dinding Labirin Taman Bermain!

- Pilih tombol “Reset” untuk mengatur ulang Playground dan mengembalikan Robot VR ke posisi awal.
Pilih tombol Berikutnya untuk melanjutkan sisa Pelajaran ini.