
പാഠം 3: ഒന്നിലധികം ലൂപ്പുകളുള്ള പ്രോജക്റ്റ് ഫ്ലോ
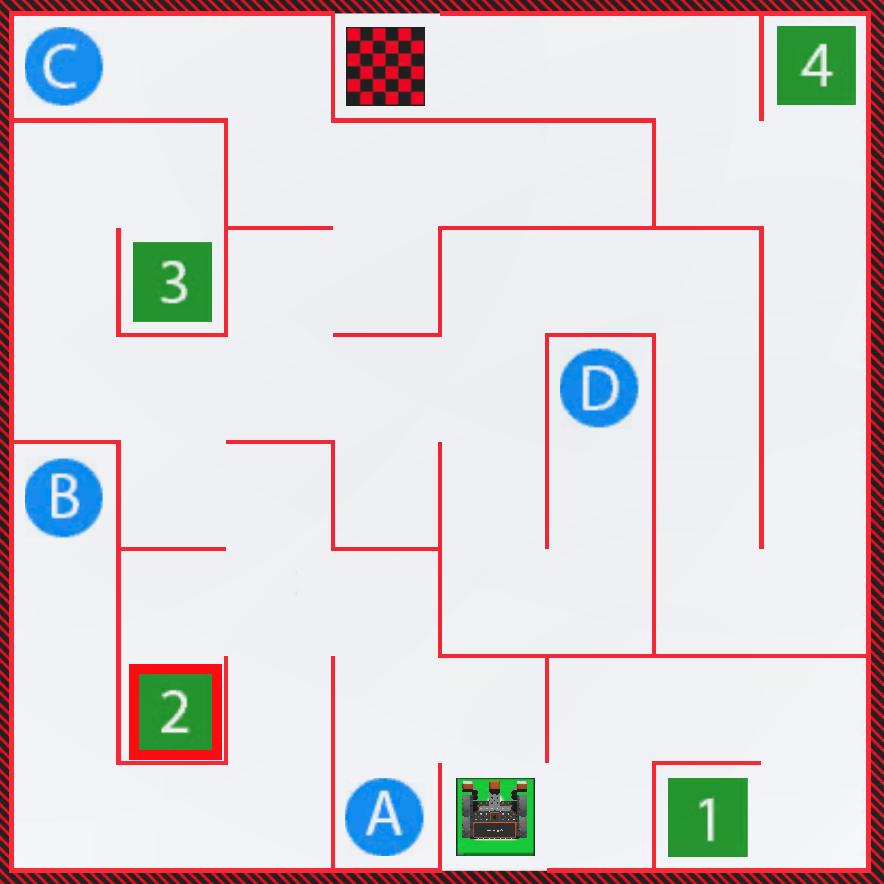
ഇപ്പോൾ നിങ്ങൾ VR റോബോട്ടിനെ Wall Maze Playgroundലെ 'A' എന്ന അക്ഷരത്തിലേക്ക് നാവിഗേറ്റ് ചെയ്യുന്നതിനുള്ള ഒരു ടെക്സ്റ്റ് പ്രോജക്റ്റ് സൃഷ്ടിച്ചു, കണ്ടീഷണലുകളും സെൻസർ മൂല്യങ്ങളും ഉപയോഗിച്ച് നിങ്ങളുടെ കഴിവുകൾ വികസിപ്പിക്കും. ഈ പാഠത്തിൽ, നിങ്ങൾ VR റോബോട്ടിനെ Wall Maze Playgroundലെ '2' എന്ന നമ്പറിലേക്ക് നാവിഗേറ്റ് ചെയ്യും, തുടർന്ന് 'B' എന്ന അക്ഷരത്തിലേക്ക് ഡ്രൈവ് ചെയ്യാൻ അധിക കമാൻഡുകൾ ആവശ്യമായി വരുന്നത് എന്തുകൊണ്ടാണെന്ന് പര്യവേക്ഷണം ചെയ്യും. മിനി-ചലഞ്ചിൽ, വാൾ മേസിന്റെ തുടക്കം മുതൽ '3' എന്ന നമ്പറിലേക്ക് നാവിഗേറ്റ് ചെയ്യാൻ നിങ്ങൾ ഈ കഴിവുകൾ പ്രയോഗിക്കും.
പഠന ഫലങ്ങൾ
- ബമ്പർ സെൻസർ അമർത്തുന്നതുവരെ ഒരു VR റോബോട്ട് ഡ്രൈവ് മുന്നോട്ട് പോകുന്ന ഒരു പ്രോജക്റ്റിലെ പ്രോഗ്രാം ഫ്ലോ വിവരിക്കുക.
പ്രോജക്റ്റിന്റെ പേര് മാറ്റുക
- മുൻ പാഠത്തിലെ പ്രോജക്റ്റ് ലോഡ് ചെയ്തിട്ടില്ലെങ്കിൽ, Unit4Lesson2 പ്രോജക്റ്റ് ലോഡ് ചെയ്യുക.
-
പ്രോജക്റ്റിന്റെ പേര് Unit4Lesson3എന്ന് മാറ്റുക.

'A' എന്ന അക്ഷരത്തിലേക്ക് പദ്ധതിയുടെ ഒഴുക്ക്
മുൻ പാഠത്തിൽ, VR റോബോട്ട് Wall Maze Playgroundലെ 'A' എന്ന അക്ഷരത്തിലേക്ക് ഡ്രൈവ് ചെയ്തു. വാൾ മേസിലെ ഒരു പുതിയ സ്ഥലത്തേക്ക് നാവിഗേറ്റ് ചെയ്യാൻ തയ്യാറെടുക്കുമ്പോൾ, പ്രോജക്റ്റ് ഫ്ലോ നമുക്ക് വിശകലനം ചെയ്യാം.

-
Wall Maze Playgroundലെ 'A' എന്ന അക്ഷരത്തിലേക്ക് ഡ്രൈവ് ചെയ്യുന്നതിനുള്ള പ്രോജക്റ്റ് ഫ്ലോ നന്നായി മനസ്സിലാക്കാൻ, നിങ്ങളുടെ മുൻ പ്രോജക്റ്റ് പരിഷ്കരിച്ചുകൊണ്ട് ആരംഭിക്കുക അല്ലെങ്കിൽ ഈ അടിസ്ഥാന പ്രോജക്റ്റുമായി പൊരുത്തപ്പെടുന്നതിന് ഒരു പുതിയ പ്രോജക്റ്റ് സൃഷ്ടിക്കുക.
def main(): left_bumper.pressed അല്ലാത്തപ്പോൾ(): drivetrain.drive(FORWARD) wait(5, MSEC) drivetrain.turn_for(LEFT, 90, DEGREES) left_bumper.pressed അല്ലാത്തപ്പോൾ(): drivetrain.drive(FORWARD) wait(5, MSEC) drivetrain.turn_for(LEFT, 90, DEGREES) left_bumper.pressed അല്ലാത്തപ്പോൾ(): drivetrain.drive(FORWARD) wait(5, MSEC) drivetrain.stop() - ഒരു പ്രോജക്റ്റ് അല്ലാത്ത എന്ന അവസ്ഥയുള്ള whileലൂപ്പ് ഉപയോഗിക്കുമ്പോൾ, പ്രോജക്റ്റിന്റെ പ്രോഗ്രാം ഫ്ലോ ഇപ്പോഴും മുകളിൽ നിന്ന് താഴേക്ക് അതേ ക്രമം പിന്തുടരുന്നു. whileലൂപ്പ്, ഒരു വ്യവസ്ഥ പാലിക്കപ്പെടുന്നതുവരെ, ഒരു പ്രത്യേക ഘട്ടത്തിൽ പ്രോഗ്രാം ഫ്ലോ "താൽക്കാലികമായി നിർത്താൻ" അനുവദിക്കുന്നു. അല്ലഓപ്പറേറ്റർ, കണ്ടീഷൻ റിപ്പോർട്ട് ചെയ്യുന്നതുവരെ പ്രോജക്റ്റിനെ ലൂപ്പിൽ തുടരാൻ അനുവദിക്കുന്നു. പിന്നെ പ്രോജക്റ്റ് ലൂപ്പിന് പുറത്തുള്ള അടുത്ത കമാൻഡിലേക്ക് ഒഴുകും. ഇടത് ബമ്പർ അമർത്തുന്നത് പോലുള്ള ഒരു ബൂളിയൻ അവസ്ഥ ശരി അല്ലെങ്കിൽ തെറ്റ് മൂല്യം റിപ്പോർട്ട് ചെയ്യും. 'A' എന്ന അക്ഷരത്തിലേക്ക് VR റോബോട്ടിനെ നയിക്കുന്നതിനുള്ള ഈ കോഡിൽ, ഇടതു ബമ്പർ അമർത്തുന്നതിന്റെ ബൂളിയൻ അവസ്ഥ True ആകുന്നതുവരെ VR റോബോട്ട് മുന്നോട്ട് നയിക്കും.
'A' എന്ന അക്ഷരത്തിലേക്ക് ഡ്രൈവ് ചെയ്യുന്നതിനുള്ള പ്രോജക്റ്റിന്റെ പ്രോജക്റ്റ് ഫ്ലോ ഇതുപോലെ കാണപ്പെടും: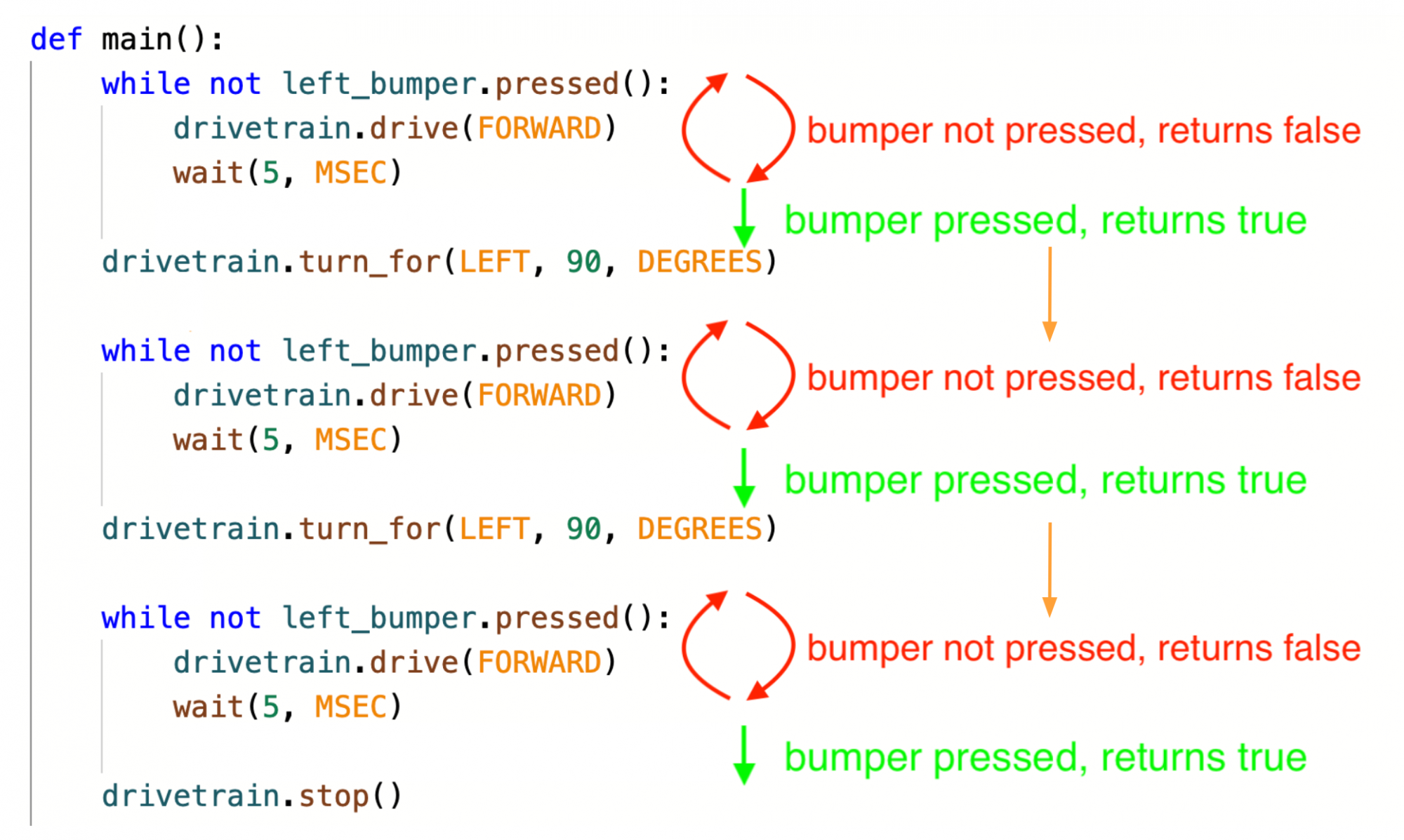
VR റോബോട്ടിന്റെ സ്വഭാവം ഓരോഉംലൂപ്പും എങ്ങനെ എക്സിക്യൂട്ട് ചെയ്യുന്നുവെന്ന് കാണിക്കുന്നു. VR റോബോട്ടിന്റെ ചലനത്തിനൊപ്പം, ഓരോനും ശേഷവും VR റോബോട്ട് എവിടേക്കാണ് നീങ്ങിയതെന്ന് നമുക്ക് വ്യക്തമായി കാണാൻ കഴിയും, അതേസമയം പ്രോജക്റ്റിലെലൂപ്പ് നടപ്പിലാക്കി.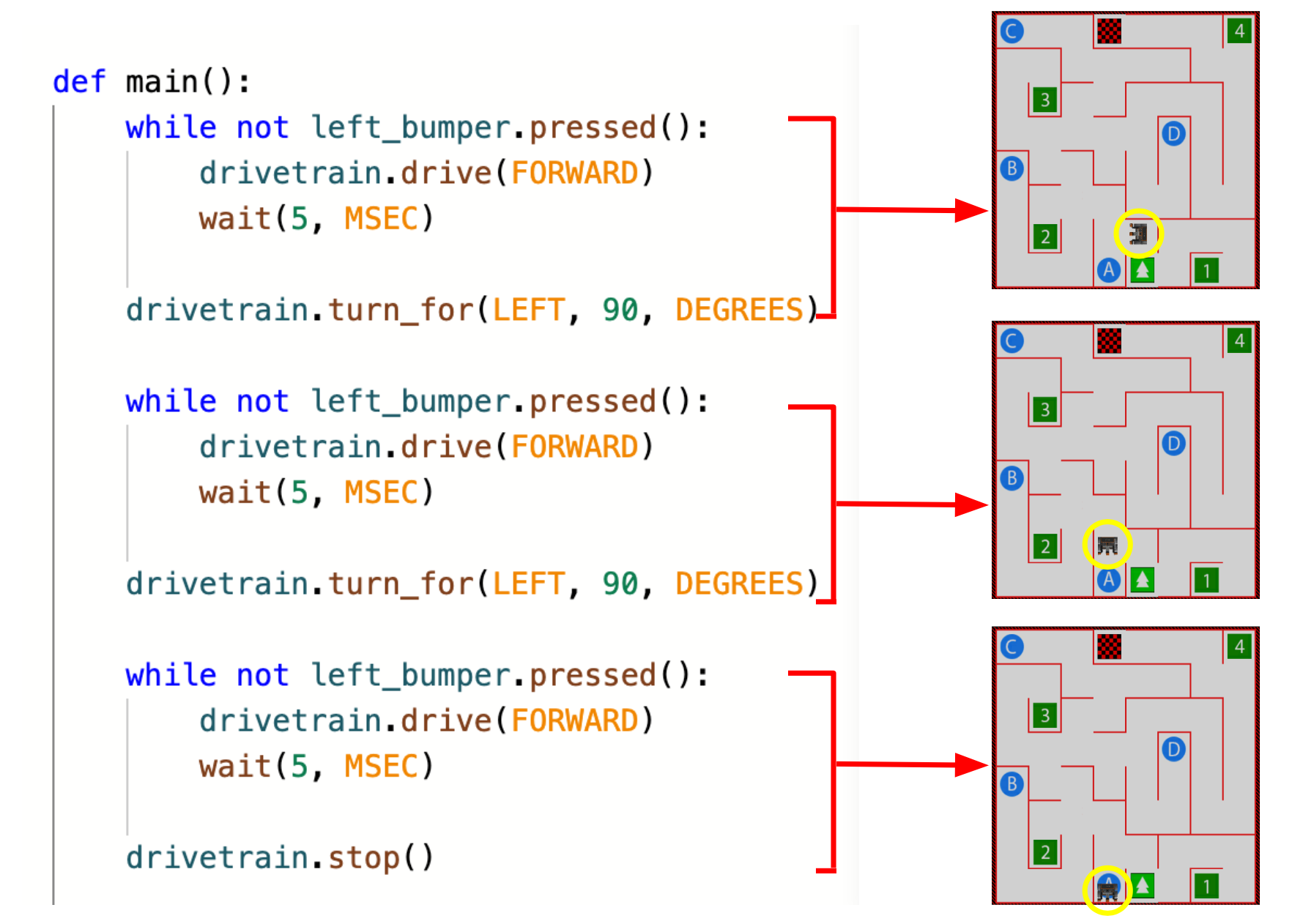
'2' എന്ന നമ്പറിലേക്ക് ഡ്രൈവ് ചെയ്യുക
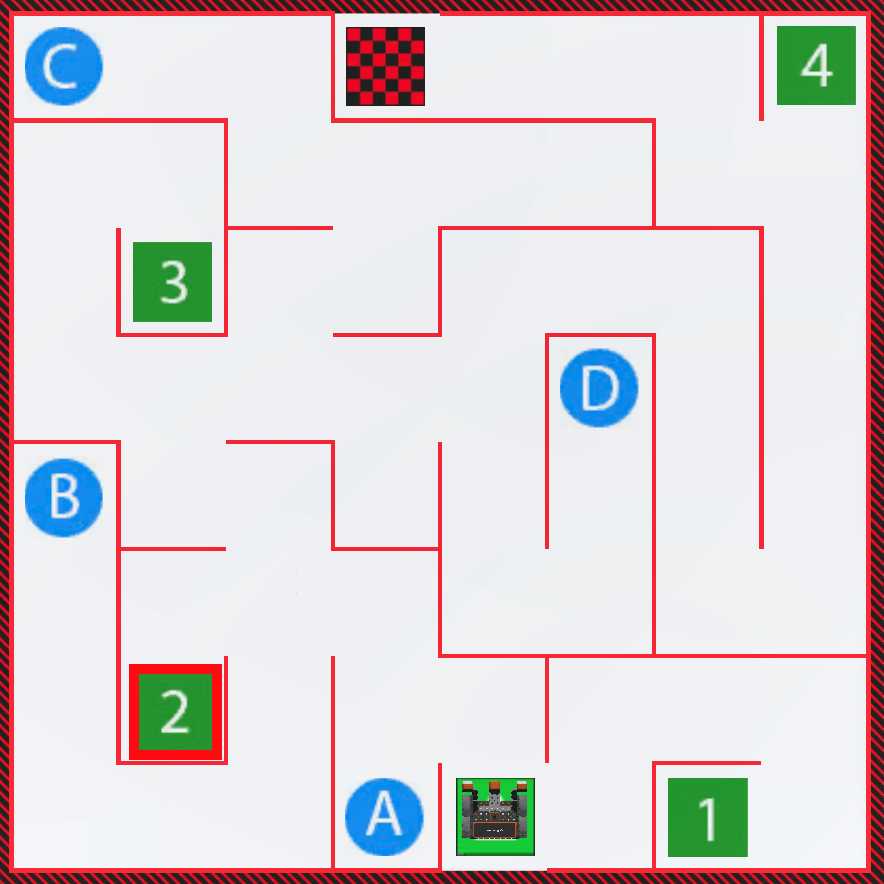
ഈ പാഠത്തിൽ, VR റോബോട്ട് Wall Maze Playgroundൽ '2' എന്ന നമ്പറിലേക്ക് ഡ്രൈവ് ചെയ്യുന്ന തരത്തിൽ പ്രോജക്റ്റ് എഡിറ്റ് ചെയ്യും!
-
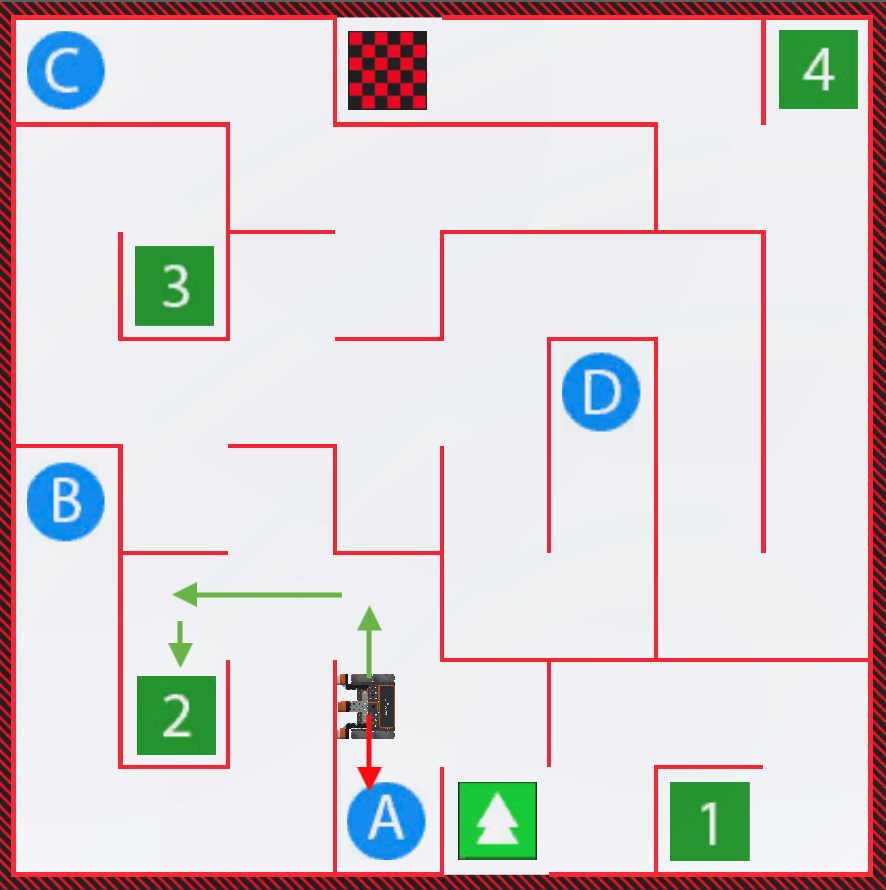
രണ്ടാം പാഠത്തിലെ പ്രോജക്റ്റിൽ VR റോബോട്ട് ഇടത്തേക്ക് തിരിഞ്ഞ് 'A' എന്ന അക്ഷരത്തിലേക്ക് പോകുന്നതായി കാണാം. '2' എന്ന നമ്പറിലേക്ക് നാവിഗേറ്റ് ചെയ്യുന്നതിന്, VR റോബോട്ട് പകരം വലത്തേക്ക് തിരിയണം, മുന്നോട്ട് ഡ്രൈവ് ചെയ്യണം, തുടർന്ന് ഇടത്തേക്ക് തിരിയണം.
-
രണ്ടാമത്തെ turn_forകമാൻഡിന്റെ ദിശ ഇടത്തേക്ക് പകരം വലത്തേക്ക് മാറ്റുക. നിങ്ങളുടെ പ്രോജക്റ്റ് ഇപ്പോൾ ഇതുപോലെ ആയിരിക്കണം:
def main(): left_bumper.pressed അല്ലാത്തപ്പോൾ(): drivetrain.drive(FORWARD) wait(5, MSEC) drivetrain.turn_for(LEFT, 90, DEGREES) left_bumper.pressed അല്ലാത്തപ്പോൾ(): drivetrain.drive(FORWARD) wait(5, MSEC) drivetrain.turn_for(RIGHT, 90, DEGREES) left_bumper.pressed അല്ലാത്തപ്പോൾ(): drivetrain.drive(FORWARD) wait(5, MSEC) drivetrain.stop() - വാൾ മെയ്സ് പ്ലേഗ്രൗണ്ട് തുറന്നിട്ടില്ലെങ്കിൽ അത് സമാരംഭിച്ച് പ്രോജക്റ്റ് പ്രവർത്തിപ്പിക്കുക.
-
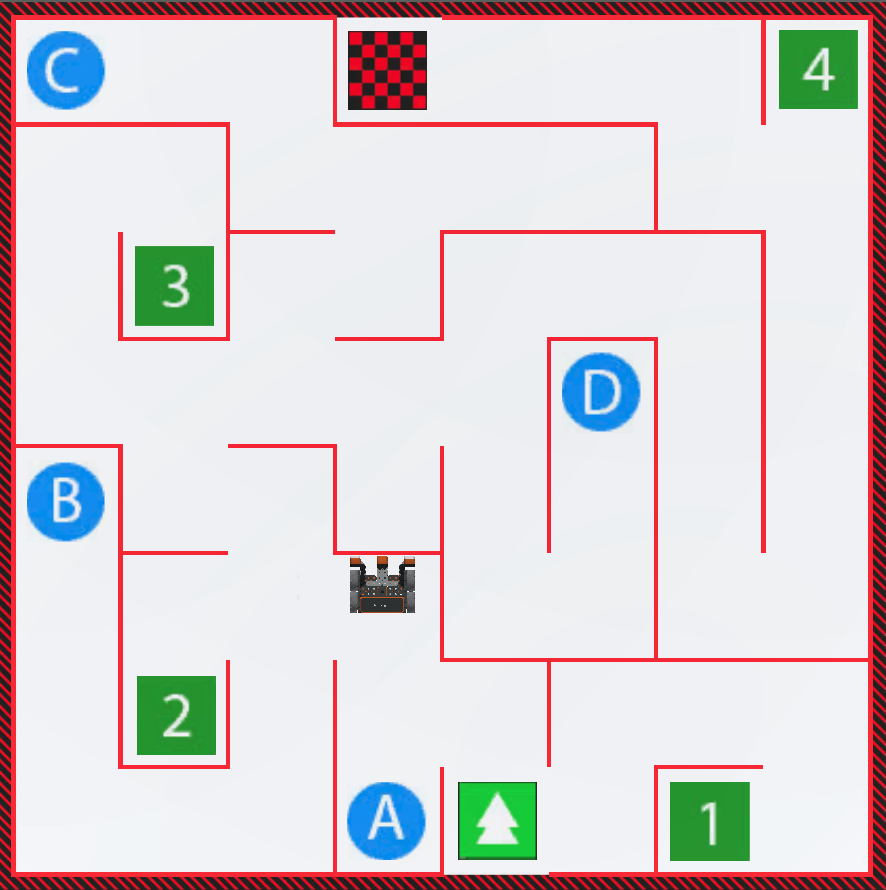
VR റോബോട്ട് '2' എന്ന നമ്പറിലേക്ക് ഓടിക്കാൻ തുടങ്ങുന്നത് കാണുക, പക്ഷേ ഒരു ചുവരിൽ നിർത്തുക. അതിനാൽ, ചുമരിൽ അമർത്തിയാൽ വിആർ റോബോട്ട് നിർത്തുന്നതിന് പകരം ഇടത്തേക്ക് തിരിയേണ്ടതുണ്ട്.
-
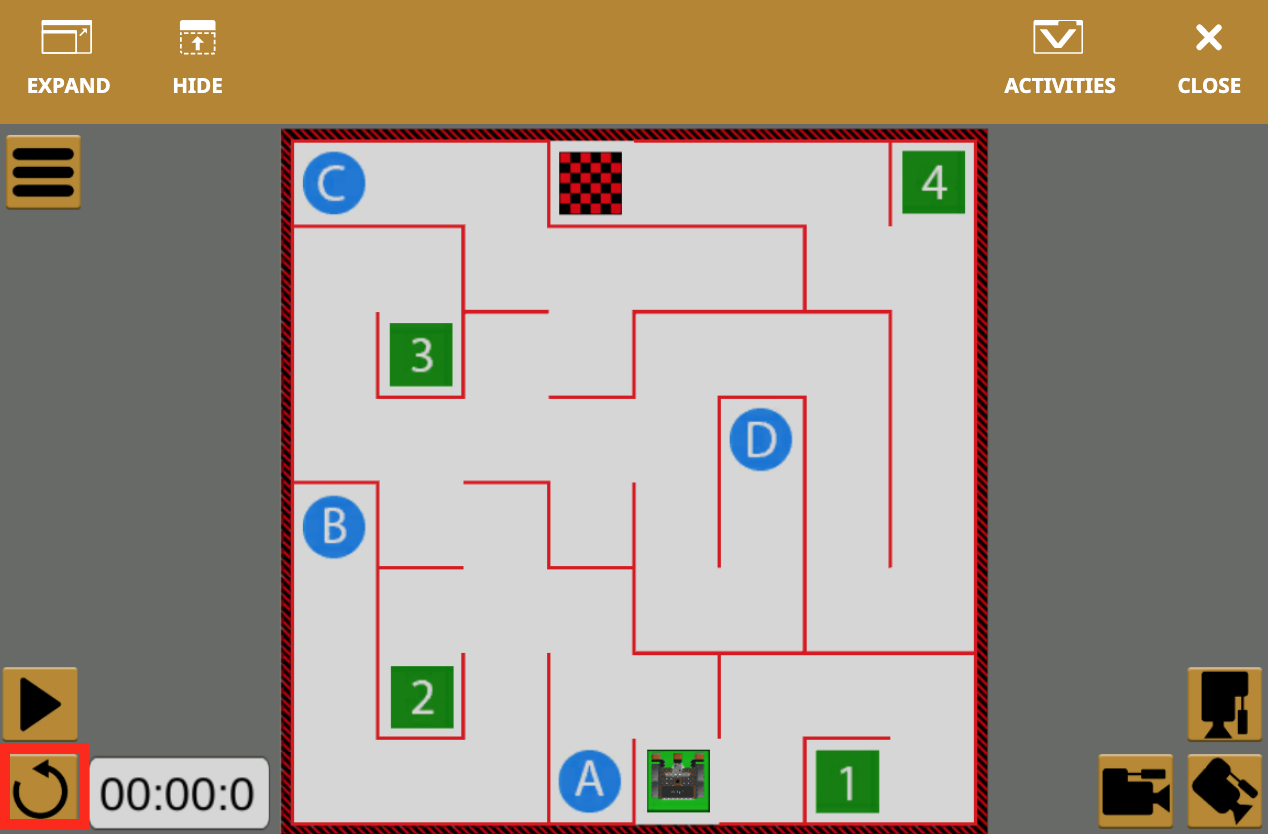
പ്ലേഗ്രൗണ്ട് പുനഃസജ്ജമാക്കാൻ "റീസെറ്റ്" ബട്ടൺ തിരഞ്ഞെടുത്ത് VR റോബോട്ടിനെ ആരംഭ സ്ഥാനത്തേക്ക് തിരികെ നീക്കുക.
-
VR റോബോട്ടിനെ '2' എന്ന നമ്പറിലേക്ക് നയിക്കുന്നതിന്, stop കമാൻഡ് നീക്കം ചെയ്ത് താഴെ പറയുന്ന കമാൻഡുകൾ ഉപയോഗിച്ച് കോഡ് എഡിറ്റ് ചെയ്യുക.
def main(): left_bumper.pressed അല്ലാത്തപ്പോൾ(): drivetrain.drive(FORWARD) wait(5, MSEC) drivetrain.turn_for(LEFT, 90, DEGREES) left_bumper.pressed അല്ലാത്തപ്പോൾ(): drivetrain.drive(FORWARD) wait(5, MSEC) drivetrain.turn_for(RIGHT, 90, DEGREES) left_bumper.pressed അല്ലാത്തപ്പോൾ(): drivetrain.drive(FORWARD) wait(5, MSEC) drivetrain.turn_for(LEFT, 90, DEGREES) left_bumper.pressed അല്ലാത്തപ്പോൾ(): drivetrain.drive(FORWARD) wait(5, MSEC) drivetrain.turn_for(LEFT, 90, DEGREES) left_bumper.pressed( അല്ലാത്തപ്പോൾ): drivetrain.drive(FORWARD) wait(5, MSEC) drivetrain.stop() - Wall Maze Playground തുറന്നിട്ടില്ലെങ്കിൽ അത് സമാരംഭിച്ച് പ്രോജക്റ്റ് പ്രവർത്തിപ്പിക്കുക.
-
വാൾ മെയ്സ് പ്ലേഗ്രൗണ്ട്ൽ '2' എന്ന നമ്പറിലേക്ക് VR റോബോട്ട് ഡ്രൈവ് ചെയ്യുന്നത് കാണുക!

- പ്ലേഗ്രൗണ്ട് പുനഃസജ്ജമാക്കാൻ "റീസെറ്റ്" ബട്ടൺ തിരഞ്ഞെടുത്ത് VR റോബോട്ടിനെ ആരംഭ സ്ഥാനത്തേക്ക് തിരികെ നീക്കുക.
ഈ പാഠത്തിന്റെ ബാക്കി ഭാഗം തുടരാൻ അടുത്തത് ബട്ടൺ തിരഞ്ഞെടുക്കുക.