
Memprogram Cakar - C++
 Kotak Alat Guru
-
Garis Besar Aktivitas
Kotak Alat Guru
-
Garis Besar Aktivitas
-
Eksplorasi ini akan memperkenalkan siswa pada pemrograman dasar Motor Cakar V5 Clawbot.
-
Belajar memprogram Motor Cakar memungkinkan siswa mengendalikan dengan tepat bagaimana V5 Clawbot mencengkeram objek di lingkungannya.
V5 Clawbot siap untuk mencengkeram!
Eksplorasi ini akan memungkinkan Anda mulai membuat beberapa proyek keren yang menggunakan cakar V5 Clawbot untuk mencengkeram objek.
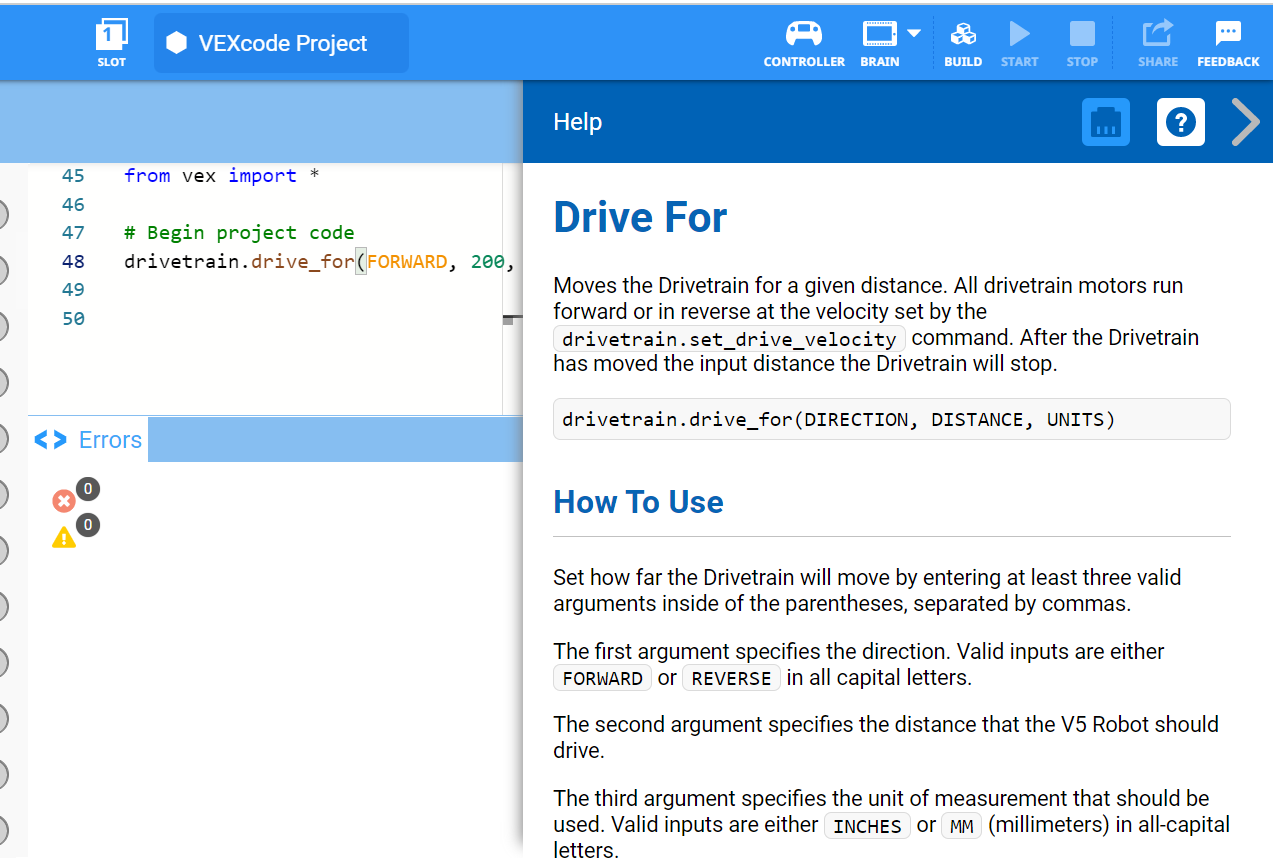
- Instruksi VEXcode V5 yang akan digunakan dalam eksplorasi ini meliputi:
- ClawMotor.setPosition(0, derajat);
- ClawMotor.spinFor(maju, 90, derajat);
- ClawMotor.setTimeout (2, detik);
-
Untuk mengetahui informasi lebih lanjut tentang instruksi, pilih Bantuan lalu pilih ikon tanda tanya di samping perintah untuk melihat informasi lebih lanjut.
- Pastikan Anda telah mengunduh dan menyiapkan perangkat keras yang diperlukan, buku catatan teknik, dan VEXcode V5.
| Kuantitas | Bahan-bahan yang Dibutuhkan |
|---|---|
| 1 |
Kit Pemula Kelas VEX V5 (dengan firmware terbaru) |
| 1 |
Kode VEX V5 |
| 1 |
Buku Catatan Teknik |
| 1 |
Contoh proyek Clawbot dan Advanced TrainingBot (Drivetrain 2-motor, Tanpa Gyro) |
| 1 |
Kaleng aluminium |
Langkah 1: Persiapan Eksplorasi
Sebelum Anda memulai kegiatan, apakah Anda sudah menyiapkan masing-masing barang ini? Periksa masing-masing hal berikut ini:
-
Apakah motor terpasang pada port yang benar?
-
Apakah kabel pintardimasukkan sepenuhnyake semua motor?
-
Apakah Otakdihidupkan?
-
Apakah bateraiterisi?
 Tips Guru
Tips Guru
Modelkan setiap langkah pemecahan masalah untuk siswa.
Langkah 2: Mulai Proyek Baru
Sebelum Anda memulai proyek Anda, pilih proyek templat yang benar. Proyek contoh Clawbot dan Advanced TrainingBot (Drivetrain 2-motor, Tanpa Gyro) berisi konfigurasi motor Clawbot. Jika templat tidak digunakan, robot Anda tidak akan menjalankan proyek dengan benar.
Selesaikan langkah-langkah berikut:
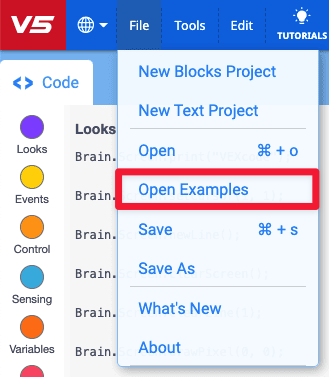
- Buka menu File.
- PilihBukaContoh.

- Pilih dan buka proyek contoh Clawbot dan Advanced TrainingBot (Drivetrain 2-motor, Tanpa Gyro).
- Karena kita akan memprogram untuk mengendalikan cakar, ganti nama proyek AndaClawControl.
- Simpanproyek Anda.
- Periksa untuk memastikan nama proyek ClawControl sekarang ada di jendela di tengah bilah alat.

Tips Guru
- Karena ini merupakan kegiatan awal dalam pemrograman, guru harus memodelkan langkah-langkahnya, lalu meminta siswa menyelesaikan tindakan yang sama. Guru kemudian harus memantau siswa untuk memastikan bahwa mereka mengikuti langkah-langkah dengan benar.
- Pastikan siswa telah memilih Buka Contoh dari menu File.
- Pastikan bahwa siswa telah memilih proyek contoh Clawbot dan Advanced TrainingBot (Drivetrain 2-motor, Tanpa Gyro).
Anda dapat menunjukkan kepada siswa bahwa ada beberapa pilihan untuk dipilih pada halamanContoh. Saat mereka membangun dan menggunakan robot lain, mereka akan memiliki kesempatan untuk menggunakan templat yang berbeda. - Anda dapat meminta siswa untuk menambahkan inisial mereka atau nama kelompok mereka ke nama proyek. Ini akan membantu membedakan proyek jika Anda meminta siswa untuk menyerahkannya.
Kotak Alat Guru
-
Berhenti dan Diskusikan
Ini saat yang tepat untuk berhenti sejenak dan meminta kelompok siswa meninjau kembali langkah-langkah yang baru saja diselesaikan saat memulai proyek baru di VEXcode V5.
Langkah 3: Program Cakar V5 untuk Membuka
Sekarang kita akan mulai dengan memprogram cakar untuk terbuka!
int main() {
// Menginisialisasi Konfigurasi Robot. JANGAN DIHAPUS!
vexcodeInit();
ClawMotor.setPosition(0, derajat);
}- Tulis instruksiClawMotor.setPosition();seperti yang ditunjukkan di atas di area pemrograman untuk mengatur posisi awal cakar.
ClawMotor.setPosition(0, derajat);
ClawMotor.setTimeout(2, detik);- Tambahkan instruksiClawMotor.setTimeout();seperti yang ditunjukkan di atas.
- Perhatikan bahwa instruksi ini muncul sebelum instruksiClawMotor.spinFor();. Kegunaannya adalah untuk mengatur berapa lama motor Claw dapat berjalan dan menghentikannya setelah waktu tersebut. Jadi meskipun motor tidak bergerak penuh 60 derajat, proyek menghentikan motor Claw setelah dua detik berlalu.
- Pastikan Set Timeout diberi indentasi agar sesuai dengan perintah Set Position , dan semua perintah berada dalam kurung kurawal.
ClawMotor.setPosition(0, derajat);
ClawMotor.setTimeout(2, detik);
ClawMotor.spinFor(mundur, 60, derajat);- Tulis instruksiClawMotor.spinFor();seperti yang ditunjukkan di atas untuk membuka cakar 60 derajat.

- Pilih slot tempat proyek akan diunduh ke V5 Robot Brain dengan mengklik ikon kotak 1 untuk membuka semua slot proyek yang tersedia dan pilih slot yang diinginkan.

- Hubungkan robot ke komputer atau tablet Anda. Ikon Otak pada bilah alatberubah menjadi hijausetelah koneksi berhasil dibuat.

- Klik ikon Unduh di samping ikon Info Perangkat untuk mengunduh proyek ke V5 Robot Brain.

- Periksa apakah proyek ClawControl telah diunduh ke otak di slot yang Anda pilih.
Kotak Alat Guru
-
Pilihan untuk Menjadi Model Pertama
Model menjalankan proyek di depan kelas sebelum meminta semua siswa mencobanya sekaligus. Kumpulkan siswa di satu area dan posisikan Clawbot sehingga cakarnya dapat dilihat oleh semua orang. Jika Anda berencana untuk mendemonstrasikan lebih dari satu kali, Anda dapat mendorong Claw hingga tertutup dengan lembut di sela-sela percobaan.
Beritahukan siswa bahwa sekarang giliran mereka untuk menjalankan proyek mereka.
- Jalankan (dalamC++atauPython) proyek pada Clawbot dengan memastikan proyek dipilih lalu tekan tombol Jalankan. Selamat atas terciptanya proyek pertama Anda untuk menggerakkan Claw!
Langkah 4: Coba Ini: Tutup Cakar V5
Sekarang Anda telah memprogram cakar untuk membuka, Anda sekarang akan memprogramnya untuk menutup.

![]() Sekarang Anda dapat membuka cakarnya, Anda tentu ingin menutupnya juga.
Sekarang Anda dapat membuka cakarnya, Anda tentu ingin menutupnya juga.
- Kembali ke proyek ClawControl Anda dan tambahkanClawMotor.spinFor();insinstruksi tambahan agar Claw Motor berputar tertutup sejauh 30 derajat. Cakar harus menutup setengahnya karena awalnya berputar terbuka sejauh 60 derajat.
- Uji apakah proyek revisi Anda memiliki cakar yang terbuka sejauh 60 derajat dan kemudian tutup sejauh 30 derajat dengan mengunduh dan menjalankan proyek ClawControl Anda.
Kotak Alat Guru
-
Solusi
Sebelumnya, Claw dibuka hingga 60 derajat. Yang termasuk dalam proyek tersebut adalah instruksi batas waktu motor yang ditetapkan karena merupakan praktik penting untuk menetapkan batas waktu saat menghidupkan manipulator yang mungkin pergerakannya dibatasi dalam beberapa cara. Menetapkan batas waktu mencegah keausan yang tidak perlu pada motor.
Berikut adalah solusi untuk langkah ini:
int main() {
// Menginisialisasi Konfigurasi Robot. JANGAN DIHAPUS!
vexcodeInit();
ClawMotor.setPosition(0, derajat);
ClawMotor.setTimeout(2, detik);
ClawMotor.spinFor(mundur, 60, derajat);
ClawMotor.spinFor(maju, 30, derajat);
}Langkah 5: Coba Ini: Mengurutkan Beberapa Gerakan

![]() Tidak semua yang Anda ambil dengan cakar akan memiliki ukuran yang sama. Cobalah membuka cakar ke posisi yang berbeda sepanjang rentang gerak.
Tidak semua yang Anda ambil dengan cakar akan memiliki ukuran yang sama. Cobalah membuka cakar ke posisi yang berbeda sepanjang rentang gerak.
- Putar motor untuk:
- Buka untuk 70 derajat
- Tutup pada suhu 20 derajat
- Buka untuk 10 derajat
- Tutup pada suhu 30 derajat
- Tutup pada suhu 25 derajat
- Jika Motor Cakar mulai pada 0 derajat, berapa derajat Motor Cakar terbuka pada akhir proyek?
- Mulailah dengan Motor Cakar tertutup.
Kotak Alat Guru
-
Solusi
Solusi untuk langkah ini disajikan di bawah ini.
Motor Cakar masih terbuka pada 5 derajat di akhir proyek: 70 - 20 = 50 --> 50 + 10 = 60 --> 60 - 30 = 30 --> 30 - 25 = 5 derajat.
int main() {
// Menginisialisasi Konfigurasi Robot. JANGAN DIHAPUS!
vexcodeInit();
// Ambil posisi Claw saat ini sebagai nol
ClawMotor.setPosition(0, derajat);
// Atur batas waktu Claw
ClawMotor.setTimeout(2, detik);
ClawMotor.spinFor(mundur, 70, derajat);
ClawMotor.spinFor(maju, 20, derajat);
ClawMotor.spinFor(mundur, 10, derajat);
ClawMotor.spinFor(maju, 30, derajat);
ClawMotor.spinFor(maju, 25, derajat);
}Langkah 6: Menyelesaikan Tantangan Kunci Rapat

![]() Tantangan Kunci Erat
Tantangan Kunci Erat
- Program Clawbot untuk menutup capit dengan aman pada kaleng aluminium kosong berukuran 12 ons tanpa menghancurkan sisi-sisinya.
- Minta Clawbot memegang kaleng sambil menaikkan dan menurunkan lengannya sejauh 45 derajat.
- Clawbot kemudian harus melepaskan kaleng tersebut dan menjauh darinya.
- Mulailah tantangan dengan cakar yang terbuka dan kaleng kosong di dalamnya.
Tips Guru
-
Mintalah siswa memulai tantangan dengan capit yang terbuka dan kaleng kosong di dalamnya.
-
Jika kaleng hancur atau jatuh dari penjepit, tantangan harus dimulai ulang setelah menyesuaikan proyek.
Kotak Alat Guru
-
Solusi
Berikut adalah contoh solusinya:
int main() {
// Menginisialisasi Konfigurasi Robot. JANGAN DIHAPUS!
vexcodeInit();
// Ambil posisi Claw saat ini sebagai nol
ClawMotor.setPosition(0, derajat);
// Atur batas waktu Claw
ClawMotor.setTimeout(2, detik);
ClawMotor.spinFor(maju, 170, derajat);
ArmMotor.spinFor(maju, 45, derajat);
ArmMotor.spinFor(mundur, 45, derajat);
ClawMotor.spinFor(mundur, 150, derajat);
Drivetrain.driveFor(mundur, 150, mm);
}- Proyek tersebut menetapkan batas waktu, menutup cakar di sekitar kaleng, mengangkat dan menurunkan kaleng, melepaskannya, lalu mundur.
- Rubrik Pemrograman(Google Doc / .docx / .pdf)