
![]() โครงร่างกิจกรรมกล่องเครื่องมือสำหรับครู
-
โครงร่างกิจกรรมกล่องเครื่องมือสำหรับครู
-
-
การสำรวจนี้จะแนะนำให้นักเรียนได้รู้จักกับการเขียนโปรแกรมขั้นพื้นฐานของ Claw Motor ของ V5 Clawbot
-
การเรียนรู้การตั้งโปรแกรม Claw Motor ช่วยให้นักเรียนสามารถควบคุมการยึดจับวัตถุในสภาพแวดล้อมของ V5 Clawbot ได้อย่างเหมาะสม
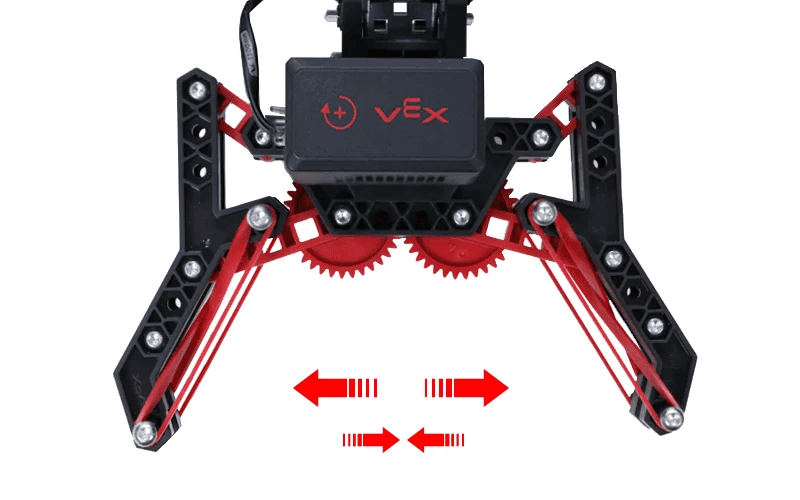
V5 Clawbot พร้อมจับแล้ว!
การสำรวจนี้จะช่วยให้คุณเริ่มสร้างโปรเจ็กต์เจ๋งๆ ที่ใช้กรงเล็บของ V5 Clawbot เพื่อจับวัตถุต่างๆ
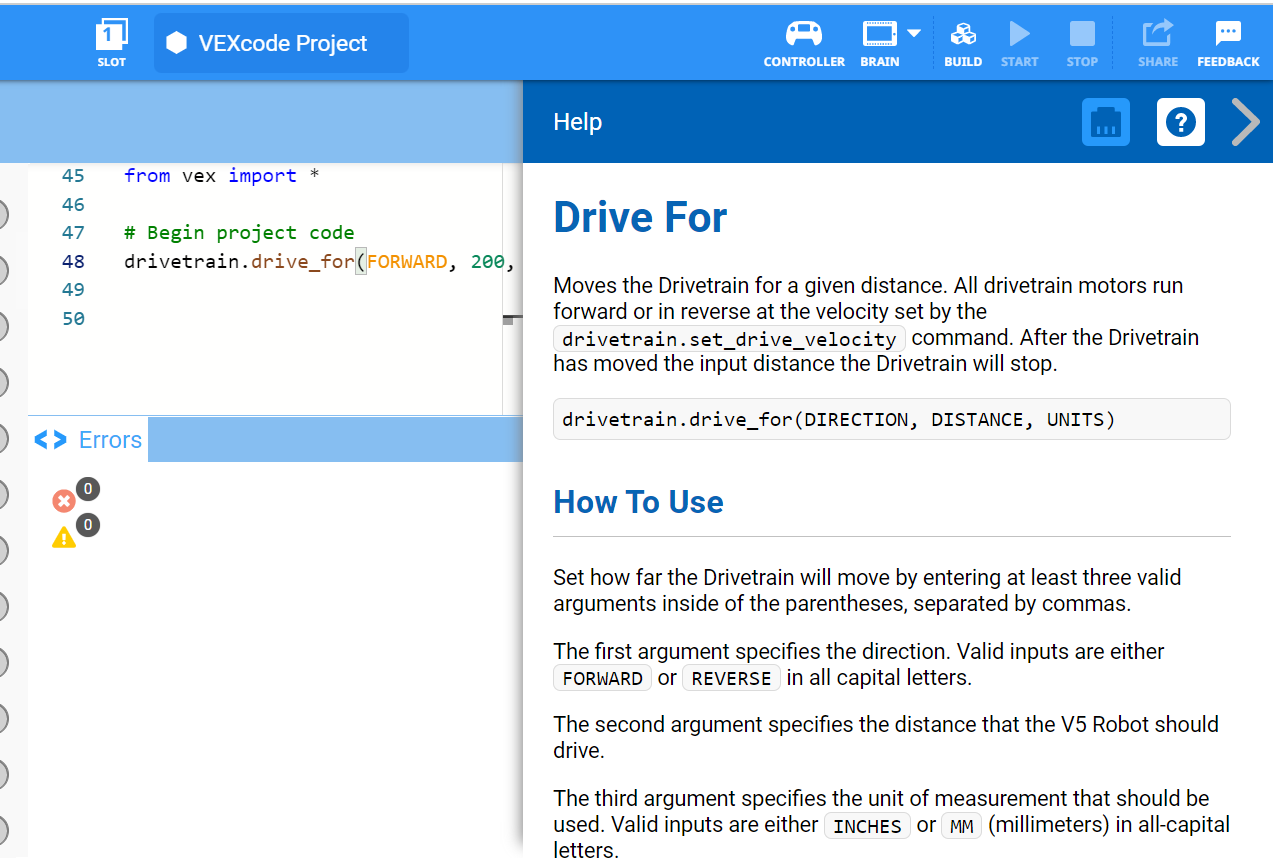
- คำแนะนำ VEXcode V5 ที่จะใช้ในการสำรวจนี้ ได้แก่:
- ClawMotor.setPosition(0, องศา);
- ClawMotor.spinFor(ไปข้างหน้า, 90, องศา);
- ClawMotor.setTimeout (2, วินาที);
-
หากต้องการดูข้อมูลเพิ่มเติมเกี่ยวกับคำแนะนำ ให้เลือกวิธีใช้ จากนั้นเลือกไอคอนเครื่องหมายคำถามถัดจากคำสั่งเพื่อดูข้อมูลเพิ่มเติม
- ตรวจสอบให้แน่ใจว่าคุณมีฮาร์ดแวร์ที่จำเป็น สมุดบันทึกวิศวกรรม และ VEXcode V5 ที่ดาวน์โหลดและพร้อมใช้งานแล้ว
| ปริมาณ | วัสดุที่ต้องใช้ |
|---|---|
| 1 |
VEX V5 Classroom Starter Kit (พร้อมเฟิร์มแวร์ล่าสุด) |
| 1 |
รหัส VEX V5 |
| 1 |
สมุดบันทึกวิศวกรรม |
| 1 |
โปรเจ็กต์ตัวอย่างเทมเพลต Clawbot (ระบบส่งกำลัง 2 มอเตอร์ ไม่มีไจโร) |
| 1 |
กระป๋องอลูมิเนียม |
![]() เคล็ดลับสำหรับครู
เคล็ดลับสำหรับครู
จำลองขั้นตอนการแก้ไขปัญหาแต่ละขั้นตอนให้กับนักเรียน
ขั้นตอนที่ 2: เริ่มโครงการใหม่
ก่อนที่คุณจะเริ่มต้นโครงการของคุณ โปรดเลือกโครงการเทมเพลตที่ถูกต้อง โปรเจ็กต์ตัวอย่างเทมเพลต Clawbot (ระบบส่งกำลัง 2 มอเตอร์ ไม่มีไจโร) ประกอบไปด้วยการกำหนดค่ามอเตอร์ของ Clawbot หากไม่ใช้เทมเพลต หุ่นยนต์ของคุณจะไม่สามารถรันโครงการได้อย่างถูกต้อง

ดำเนินการตามขั้นตอนต่อไปนี้:
- เปิดเมนูไฟล์
- เลือก เปิด ตัวอย่าง.

- เลือกและเปิดโครงการตัวอย่างเทมเพลต Clawbot (Drivetrain 2-motor, No Gyro)
- เนื่องจากเราจะเขียนโปรแกรมเพื่อควบคุมกรงเล็บ ให้เปลี่ยนชื่อโปรเจ็กต์ของคุณเป็น ClawControl
- บันทึก โครงการของคุณ
- ตรวจสอบให้แน่ใจว่าชื่อโครงการ ClawControl อยู่ในหน้าต่างตรงกลางแถบเครื่องมือแล้ว

![]() เคล็ดลับสำหรับครู
เคล็ดลับสำหรับครู
-
เนื่องจากนี่เป็นกิจกรรมเริ่มต้นในการเขียนโปรแกรม ครูควรสร้างแบบจำลองขั้นตอน จากนั้นจึงขอให้นักเรียนทำตามขั้นตอนเดียวกัน จากนั้นครูควรติดตามนักเรียนเพื่อให้แน่ใจว่านักเรียนปฏิบัติตามขั้นตอนอย่างถูกต้อง
-
ตรวจสอบให้แน่ใจว่านักเรียนได้เลือก เปิดตัวอย่าง จากเมนูไฟล์
-
ตรวจสอบให้แน่ใจว่านักเรียนได้เลือกโครงการตัวอย่างเทมเพลต Clawbot (Drivetrain 2-motor, No Gyro)
คุณสามารถชี้ให้ผู้เรียนทราบว่ามีตัวเลือกหลายตัวให้เลือกในหน้า ตัวอย่าง เมื่อพวกเขาสร้างและใช้หุ่นยนต์ตัวอื่น พวกเขาจะมีโอกาสใช้เทมเพลตที่แตกต่างกัน
-
คุณสามารถขอให้เด็กนักเรียนเพิ่มอักษรย่อของตนเองหรือชื่อกลุ่มลงในชื่อโครงการได้ สิ่งนี้จะช่วยแยกแยะโครงการต่างๆ ออกจากกัน หากคุณขอให้นักศึกษาส่งโครงการเหล่านั้น
![]() กล่องเครื่องมือสำหรับครู
-
หยุดและพูดคุย
กล่องเครื่องมือสำหรับครู
-
หยุดและพูดคุย
นี่เป็นจุดที่ดีที่จะหยุดชั่วคราวและให้กลุ่มนักศึกษาทบทวนขั้นตอนที่เพิ่งเสร็จสิ้นในการเริ่มโปรเจ็กต์ใหม่ใน VEXcode V5
ขั้นตอนที่ 3: ตั้งโปรแกรมให้ V5 Claw เปิด
ต่อไปเราจะเริ่มต้นด้วยการตั้งโปรแกรมให้กรงเล็บเปิด!
int main() {
// การเริ่มต้นการกำหนดค่าหุ่นยนต์ ห้ามถอดออก!
vexcodeInit();
ClawMotor.setPosition(0, องศา);
}- เขียนคำสั่ง ClawMotor.setPosition(); ตามที่แสดงด้านบนในพื้นที่การเขียนโปรแกรมเพื่อตั้งค่าตำแหน่งเริ่มต้นสำหรับกรงเล็บ
ClawMotor.setPosition(0, องศา);
ClawMotor.setTimeout(2, วินาที);- เพิ่มคำสั่ง ClawMotor.setTimeout(); ดังที่แสดงด้านบน
- สังเกตว่าคำสั่งนี้ปรากฏก่อนคำสั่ง ClawMotor.spinFor(); จุดประสงค์คือเพื่อตั้งค่าว่ามอเตอร์ Claw สามารถทำงานได้นานแค่ไหนและจะหยุดทำงานหลังจากนั้น แม้ว่ามอเตอร์จะไม่เคลื่อนที่เต็ม 60 องศา แต่โครงการจะหยุดมอเตอร์ Claw หลังจากผ่านไป 2 วินาที
- ตรวจสอบให้แน่ใจว่ามีการเยื้อง Set Timeout เพื่อให้ตรงกับคำสั่ง Set Position และคำสั่งทั้งหมดอยู่ภายในวงเล็บปีกกา
ClawMotor.setPosition(0, องศา);
ClawMotor.setTimeout(2, วินาที);
ClawMotor.spinFor(ย้อนกลับ, 60, องศา);- เขียนคำสั่ง ClawMotor.spinFor(); ดังที่แสดงด้านบน เพื่อเปิดกรงเล็บ 60 องศา

- เลือกช่องที่จะดาวน์โหลดโครงการบน V5 Robot Brain โดยการคลิกบนไอคอนช่อง 1 เพื่อเปิดช่องโครงการที่มีอยู่ทั้งหมดและเลือกช่องที่ต้องการ
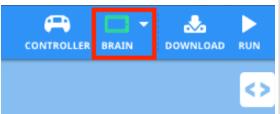
- เชื่อมต่อหุ่นยนต์กับคอมพิวเตอร์หรือแท็บเล็ตของคุณ ไอคอนสมองบนแถบเครื่องมือ จะเปลี่ยนเป็นสีเขียว หลังจากเชื่อมต่อสำเร็จแล้ว

- คลิกที่ไอคอนดาวน์โหลดถัดจากไอคอนข้อมูลอุปกรณ์เพื่อดาวน์โหลดโครงการไปยัง V5 Robot Brain

- ตรวจสอบว่าโครงการ ClawControl ได้ดาวน์โหลดไปที่สมองในสล็อตที่คุณเลือกแล้ว
![]() กล่องเครื่องมือสำหรับครู
-
ตัวเลือกในการสร้างแบบจำลองก่อน
กล่องเครื่องมือสำหรับครู
-
ตัวเลือกในการสร้างแบบจำลองก่อน
จำลองการรันโครงการหน้าชั้นเรียนก่อนที่นักเรียนทุกคนจะลองทำพร้อมกัน รวบรวมนักเรียนไว้ในพื้นที่เดียวและวาง Clawbot ในตำแหน่งที่ทุกคนสามารถมองเห็นกรงเล็บของมันได้ หากคุณวางแผนจะสาธิตมากกว่าหนึ่งครั้ง คุณสามารถดัน Claw ให้ปิดเบาๆ ระหว่างการสาธิตได้
บอกนักเรียนว่าตอนนี้ถึงตาพวกเขาที่จะสาธิตโครงการแล้ว
- เรียกใช้ (ใน C++ หรือ Python) โปรเจ็กต์บน Clawbot โดยตรวจสอบให้แน่ใจว่าได้เลือกโปรเจ็กต์แล้ว จากนั้นกดปุ่ม Run ขอแสดงความยินดีกับการสร้างโปรเจ็กต์แรกของคุณสำหรับการเคลื่อนย้าย Claw!
ขั้นตอนที่ 4: ลองสิ่งนี้: ปิด V5 Claw
ตอนนี้คุณได้ตั้งโปรแกรมให้กรงเล็บเปิดแล้ว คุณจะตั้งโปรแกรมให้ปิดได้ด้วย

![]() ตอนนี้คุณสามารถเปิดกรงเล็บได้ คุณคงอยากจะปิดมันด้วยเช่นกัน
ตอนนี้คุณสามารถเปิดกรงเล็บได้ คุณคงอยากจะปิดมันด้วยเช่นกัน
- กลับไปที่โครงการ ClawControl ของคุณและเพิ่มคำสั่ง ClawMotor.spinFor(); insเพิ่มเติมเพื่อให้ Claw Motor หมุนปิดเป็นเวลา 30 องศา กรงเล็บควรปิดลงครึ่งหนึ่ง เนื่องจากเดิมทีมันหมุนเปิดออก 60 องศา
- ทดสอบว่าโครงการที่แก้ไขของคุณมีกรงเล็บเปิดอยู่ที่ 60 องศาและปิดที่ 30 องศาโดยการดาวน์โหลดและเรียกใช้โครงการ ClawControl ของคุณ
![]() กล่องเครื่องมือสำหรับครู
-
โซลูชั่น
กล่องเครื่องมือสำหรับครู
-
โซลูชั่น
ก่อนหน้านี้ Claw เปิดได้ 60 องศา โครงการดังกล่าวยังรวมถึงคำสั่งตั้งเวลาหมดเวลาการทำงานของมอเตอร์ด้วย เนื่องจากเป็นแนวทางปฏิบัติที่สำคัญในการตั้งเวลาหมดเวลาเมื่อจ่ายไฟให้กับแมนิพิวเลเตอร์ที่อาจถูกจำกัดการเคลื่อนไหวได้ในทางใดทางหนึ่ง การตั้งเวลาหมดเวลาจะช่วยป้องกันการสึกหรอของมอเตอร์ที่ไม่จำเป็น
ต่อไปนี้เป็นวิธีแก้ไขของขั้นตอนนี้:
int main() {
// การเริ่มต้นการกำหนดค่าหุ่นยนต์ ห้ามถอดออก!
vexcodeInit();
ClawMotor.setPosition(0, องศา);
ClawMotor.setTimeout(2, วินาที);
ClawMotor.spinFor(ย้อนกลับ, 60, องศา);
ClawMotor.spinFor(เดินหน้า, 30, องศา);
}ขั้นตอนที่ 5: ลองสิ่งนี้: การจัดลำดับการเคลื่อนไหวหลายๆ ครั้ง
![]() ไม่ใช่ทุกอย่างที่คุณหยิบด้วยกรงเล็บจะมีขนาดเท่ากัน ลองเปิดกรงเล็บไปยังตำแหน่งต่างๆ ตามช่วงการเคลื่อนไหว
ไม่ใช่ทุกอย่างที่คุณหยิบด้วยกรงเล็บจะมีขนาดเท่ากัน ลองเปิดกรงเล็บไปยังตำแหน่งต่างๆ ตามช่วงการเคลื่อนไหว
- หมุนมอเตอร์เพื่อที่จะ:
- เปิดได้ 70 องศา
- ปิด 20 องศา
- เปิดได้ 10 องศา
- ปิด 30 องศา
- ปิด 25 องศา
- หาก Claw Motor เริ่มต้นที่ 0 องศา Claw Motor จะเปิดกี่องศาเมื่อสิ้นสุดโครงการ
- เริ่มต้นโดยปิด Claw Motor
![]() กล่องเครื่องมือสำหรับครู
-
โซลูชั่น
กล่องเครื่องมือสำหรับครู
-
โซลูชั่น
วิธีแก้ไขขั้นตอนนี้แสดงไว้ด้านล่าง
Claw Motor ยังคงเปิดอยู่ที่ 5 องศาเมื่อสิ้นสุดโครงการ: 70 - 20 = 50 --> 50 + 10 = 60 --> 60 - 30 = 30 --> 30 - 25 = 5 องศา
int main() {
// การเริ่มต้นการกำหนดค่าหุ่นยนต์ ห้ามถอดออก!
vexcodeInit();
// กำหนดตำแหน่งปัจจุบันของกรงเล็บเป็นศูนย์
ClawMotor.setPosition(0, degrees);
// ตั้งค่าเวลาหมดเวลาของกรงเล็บ
ClawMotor.setTimeout(2, seconds);
ClawMotor.spinFor(reverse, 70, degrees);
ClawMotor.spinFor(forward, 20, degrees);
ClawMotor.spinFor(reverse, 10, degrees);
ClawMotor.spinFor(forward, 30, degrees);
ClawMotor.spinFor(forward, 25, degrees);
}ขั้นตอนที่ 6: ทำภารกิจ Lock Tight Challenge ให้สำเร็จ

![]() ความท้าทายในการล็อคแน่น
ความท้าทายในการล็อคแน่น
- ตั้งโปรแกรม Clawbot ให้ปิดกรงเล็บบนกระป๋องอลูมิเนียมเปล่าขนาด 12 ออนซ์ได้อย่างแน่นหนาโดยไม่ทำให้ด้านข้างเสียหาย
- ให้ Clawbot จับกระป๋องไว้ในขณะที่มันยกและลดแขนลง 45 องศา
- จากนั้น Clawbot จะปล่อยกระป๋องและถอยออกมา
- เริ่มการท้าทายด้วยกรงเล็บที่เปิดออกและมีกระป๋องเปล่าอยู่ข้างใน
![]() เคล็ดลับสำหรับครู
เคล็ดลับสำหรับครู
-
ให้เด็กนักเรียนเริ่มต้นการท้าทายด้วยการเปิดกรงเล็บและมีกระป๋องเปล่าอยู่ข้างใน
-
หากกระป๋องถูกบดหรือหลุดออกจากกรงเล็บ จะต้องเริ่มความท้าทายใหม่อีกครั้งหลังจากปรับโครงการ
![]() กล่องเครื่องมือสำหรับครู
-
โซลูชั่น
กล่องเครื่องมือสำหรับครู
-
โซลูชั่น
นี่คือตัวอย่างวิธีแก้ปัญหา:
int main() {
// การเริ่มต้นการกำหนดค่าหุ่นยนต์ ห้ามถอดออก!
vexcodeInit();
// กำหนดตำแหน่งปัจจุบันของ Claw เป็นศูนย์
ClawMotor.setPosition(0, degrees);
// ตั้งค่าเวลาหมดเวลาของ Claw
ClawMotor.setTimeout(2, seconds);
ClawMotor.spinFor(forward, 170, degrees);
ArmMotor.spinFor(forward, 45, degrees);
ArmMotor.spinFor(reverse, 45, degrees);
ClawMotor.spinFor(reverse, 150, degrees);
Drivetrain.driveFor(reverse, 150, mm);
}- โครงการจะกำหนดเวลาหมดเวลา ปิดกรงเล็บรอบกระป๋อง ยกและลดกระป๋อง ปล่อย และถอยกลับ
- การให้คะแนนการเขียนโปรแกรม (Google Doc / .docx / .pdf)