
수업 2: 동작 반복하기
VR 로봇이 펜을 사용하여 아트 캔버스 놀이터 에 사각형을 그렸으므로 이제 루프로 사용하고 프로젝트를 단순화하는 방법을 배우게 됩니다. 이 수업에서는에서 루프를 사용하여 아트 캔버스 놀이터 에 정사각형을 그리는 단계를 안내합니다.
학습 성과
- 에서 으로 이어지는 루프를 사용하여 루프 안에 있는 명령을 지정된 횟수만큼 반복하는 방법을 식별하세요.
- for 루프에는 '값' 변수와 반복 횟수를 식별하는범위함수가 포함되어 있음을 식별합니다.
- 에서까지의 루프의범위함수가 루프를 몇 번 반복해야 하는지 식별합니다.
- for루프의범위함수가 정수를 매개변수로 받을 수 있음을 확인하세요.
- 프로젝트에서 대신 루프를 사용하는 이유를 설명하세요.
- , 루프가 포함된 프로젝트의 흐름을 설명하세요.
프로젝트 이름 바꾸기
- 이전 수업의 프로젝트가 아직 로드되지 않았다면 Unit3Lesson1 프로젝트를 로드하세요.
- 프로젝트 이름 상자를 선택하여 프로젝트 이름을 변경합니다.

- 새 프로젝트 이름 Unit3Lesson2를 입력하고 "저장"을 선택합니다.

반복되는 동작
으로 반복하는 루프는 그 안에 있는 명령을 지정된 횟수만큼 반복하는 데 사용됩니다. 으로 반복하는 루프는 명령이 반복되는 프로젝트를 만들 때 시간과 노력을 절약해줍니다. 작업 공간에서 추가 명령을 드래그하거나 입력하거나 기존 명령을 복제하는 데 시간을 들이는 대신, 에서으로 반복하는 루프를 사용하면 공간과 시간을 절약할 수 있습니다.
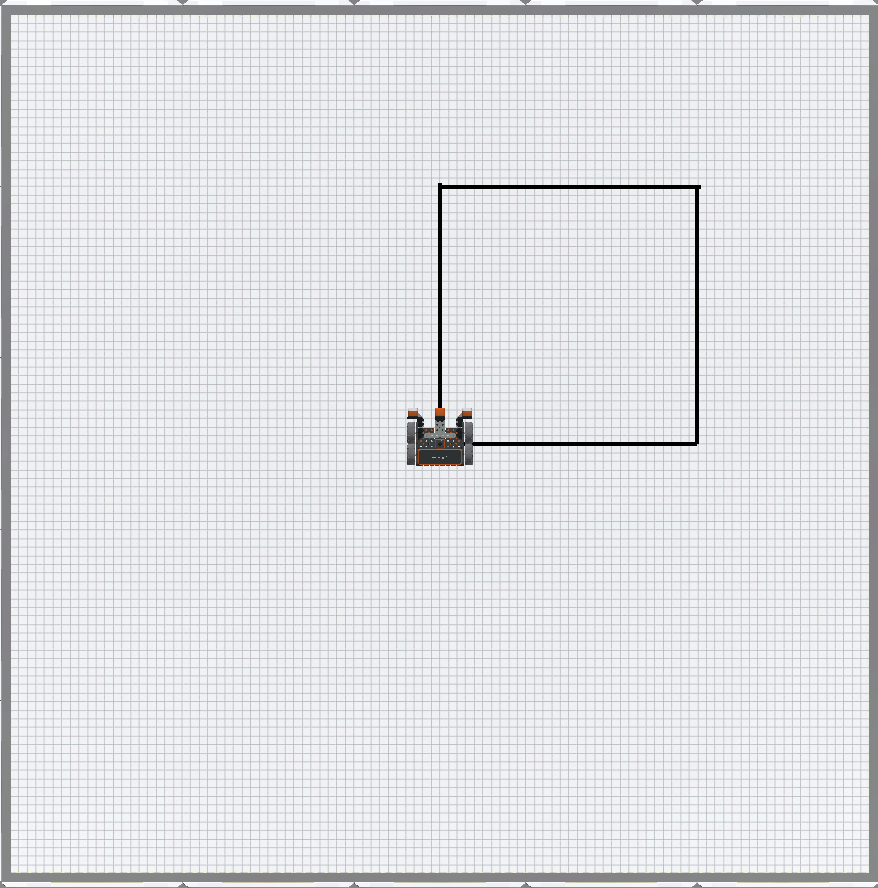
이 프로젝트에서는에서루프를 사용하여 VR 로봇이 정사각형의 네 변을 그리도록 합니다. 즉, 한 변을 그리는 명령을 4번 반복합니다.
- 이전 프로젝트를 수정하거나 아래 프로젝트를 복사하거나 이 기본 프로젝트와 일치하도록 새 프로젝트를 만들어 시작하세요.
def main():
pen.move(아래로)
drivetrain.drive_for(전진, 600, MM)
drivetrain.turn_for(오른쪽, 90, 도)
drivetrain.drive_for(전진, 600, MM)
drivetrain.turn_for(오른쪽, 90, 도)
drivetrain.drive_for(전진, 600, MM)
drivetrain.turn_for(오른쪽, 90, 도)
drivetrain.drive_for(전진, 600, MM)
drivetrain.turn_for(오른쪽, 90, 도)
-
이 프로젝트에서 반복되는 명령은drive_for과turn_for명령입니다. 프로젝트에서 아래쪽 6개 명령을 제거하면move명령 아래에drive_for명령 하나만 남고 turn_for명령 하나만 남게 되며 프로젝트는 다음과 같습니다.
def main(): pen.move(아래로) drivetrain.drive_for(전진, 600, MM) drivetrain.turn_for(오른쪽, 90, 도) -
for루프를 메인 함수의 끝까지 끌어서 프로젝트가 다음과 같이 보이도록 합니다. for루프는 자동으로 내부에wait명령을 채웁니다. wait명령를 제거하지 마세요. VR 로봇이 올바르게 동작하도록 보장합니다.
def main(): pen.move(DOWN) drivetrain.drive_for(FORWARD, 600, MM) drivetrain.turn_for(RIGHT, 90, DEGREES) 반복 횟수 범위(10): wait(5, MSEC) - 에서루프로 드라이브트레인 명령을 반복하여 사각형의 한 변을 그리려면 해당 명령이 들여쓰기로 표시된 에서루프 내에 있어야 합니다. for루프와wait명령 사이에 두 줄을 추가하여 Drivetrain 명령을 위한 공간을 확보합니다.

- 다음으로, Drivetrain 명령을 for 루프 내부로 옮기려면 명령을 for 루프 헤더 아래에 복사하여 붙여넣고, 명령을 강조 표시한 다음 drive_for 및 turn_for 명령을 루프 헤더와 wait명령 사이로 끌어다 놓거나 아래 프로젝트에서 복사하여 붙여넣습니다.
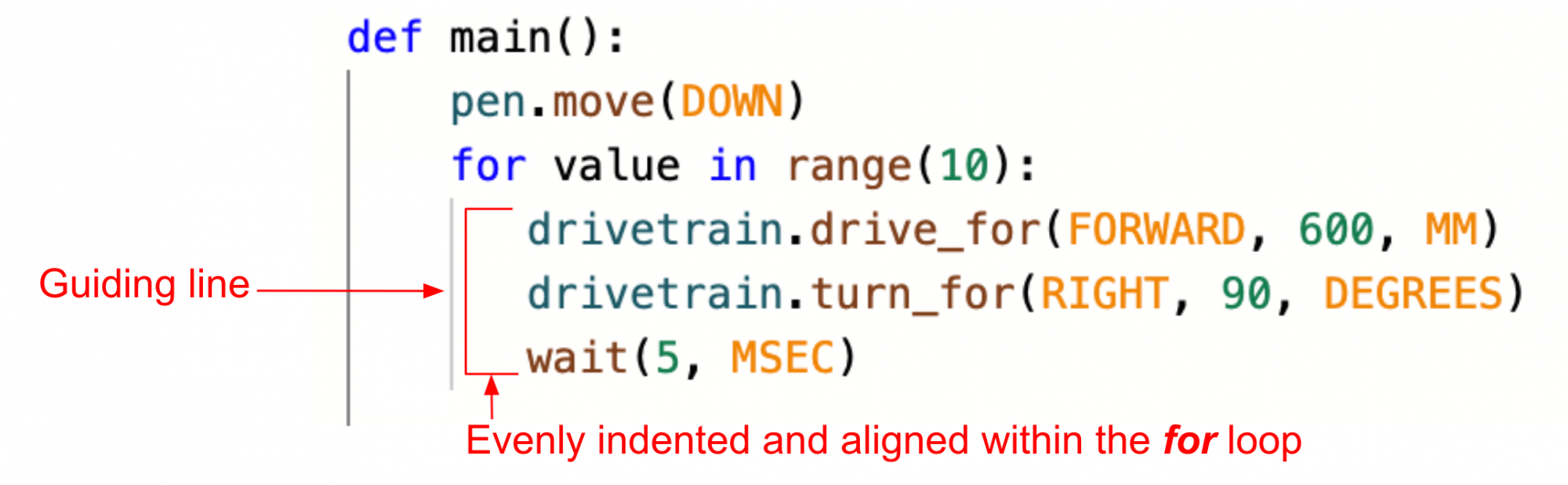
def main():
pen.move(DOWN)
for value in range(10):
drivetrain.drive_for(FORWARD, 600, MM)
drivetrain.turn_for(RIGHT, 90, DEGREES)
wait(5, MSEC)- 왼쪽의 회색 선을 가이드로 사용하여 for 루프 내부의 명령이 올바르게 들여쓰기되었는지 확인하세요. 이 선을 for 루프 내부에 있는 명령으로 지정하세요.
참고용
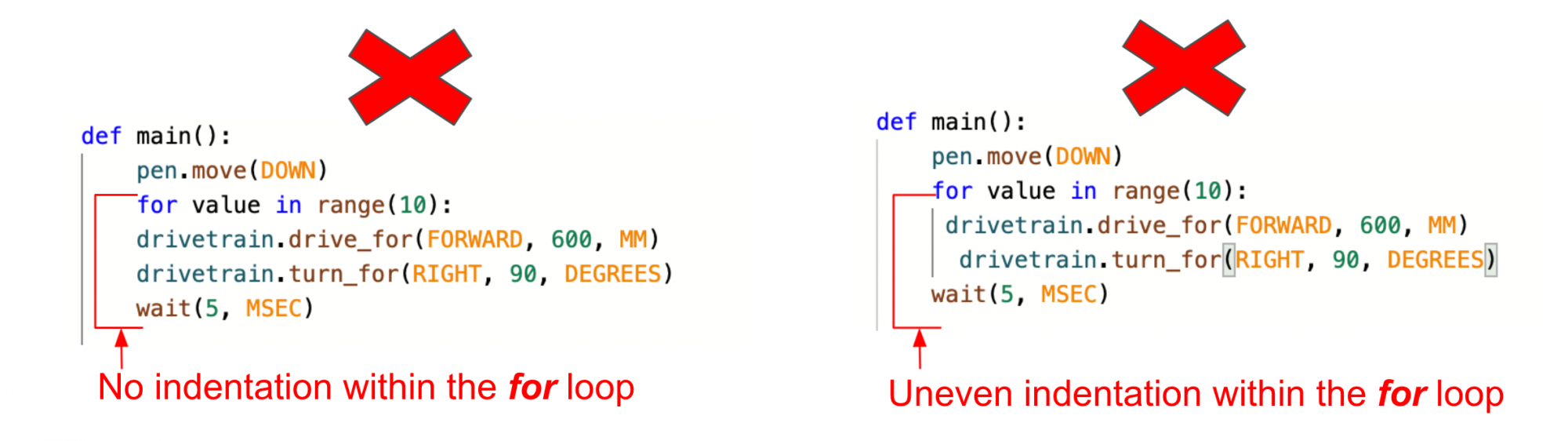
들여는 파이썬에서. 명령어의 들여쓰기는 프로젝트가 실행되는 방식을 결정합니다. for루프의 경우, 루프 안에 들여쓰기된 명령은 루프의 일부로 실행됩니다. 명령의 왼쪽에 있는 선을 사용하면 루프 내에서 명령이 어떻게 그룹화되는지에 대한 시각적 가이드로 사용할 수 있습니다.
들여쓰기 오류는 프로젝트 흐름에 영향을 미쳐, 프로젝트가 의도한 대로 실행되지 않을 수 있습니다. 여기에 나타난 것처럼 들여쓰기가 부족하거나 고르지 않은 들여쓰기는 의도한 대로 코드가 기능하도록 피해야 합니다.
VEXcode VR은 프로젝트를 실행하기 전에 들여쓰기 오류를 해결하라는 메시지를 표시할 수 있습니다. 이러한 오류는 인쇄 콘솔에서 식별할 수 있으므로 문제를 쉽게 해결하고 프로젝트를 실행할 수 있습니다.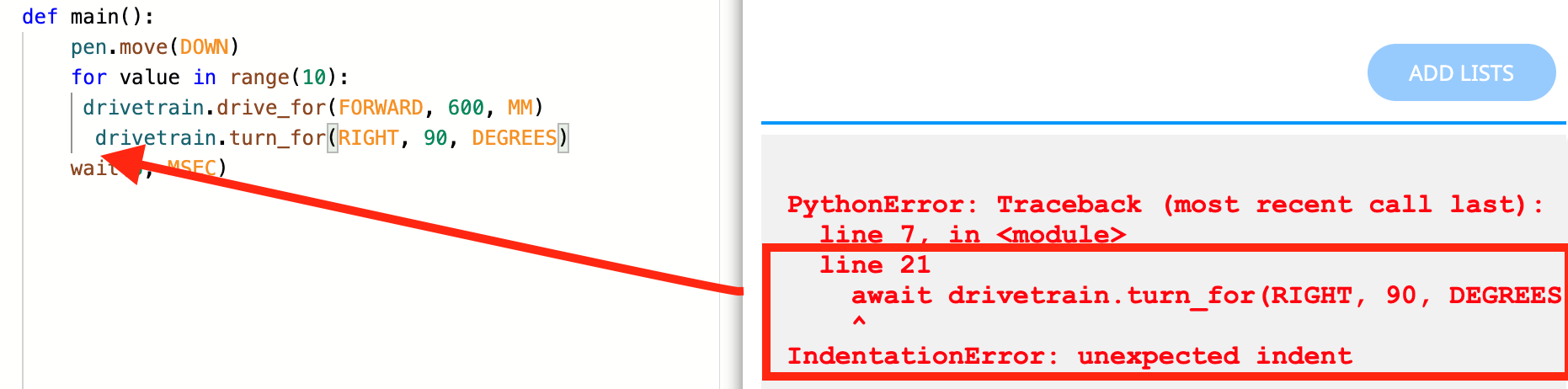
- 이제 사각형의 한 면을 그리는 Drivetrain 명령이 루프 내에 있으므로 범위함수의 매개변수를 설정할 수 있습니다. 정사각형을 그리려면 네 변을 그려야 합니다. 명령을 4번 반복하려면 for 루프 헤더의 범위 함수의 매개변수를 "4"로 설정하여 VR 로봇이 정사각형의 네 변을 모두 그리도록 합니다.
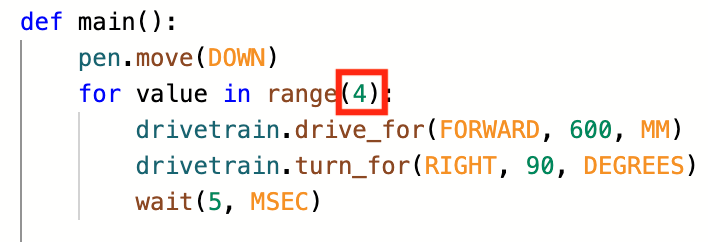
귀하의 정보를 위해
for 루프 헤더의 범위 함수는 정수를 허용합니다. 소수점(또는 부동 소수점)은 대신 루프의 매개변수로 작동하지 않습니다. 범위함수의 기본 매개변수는 '10'입니다.

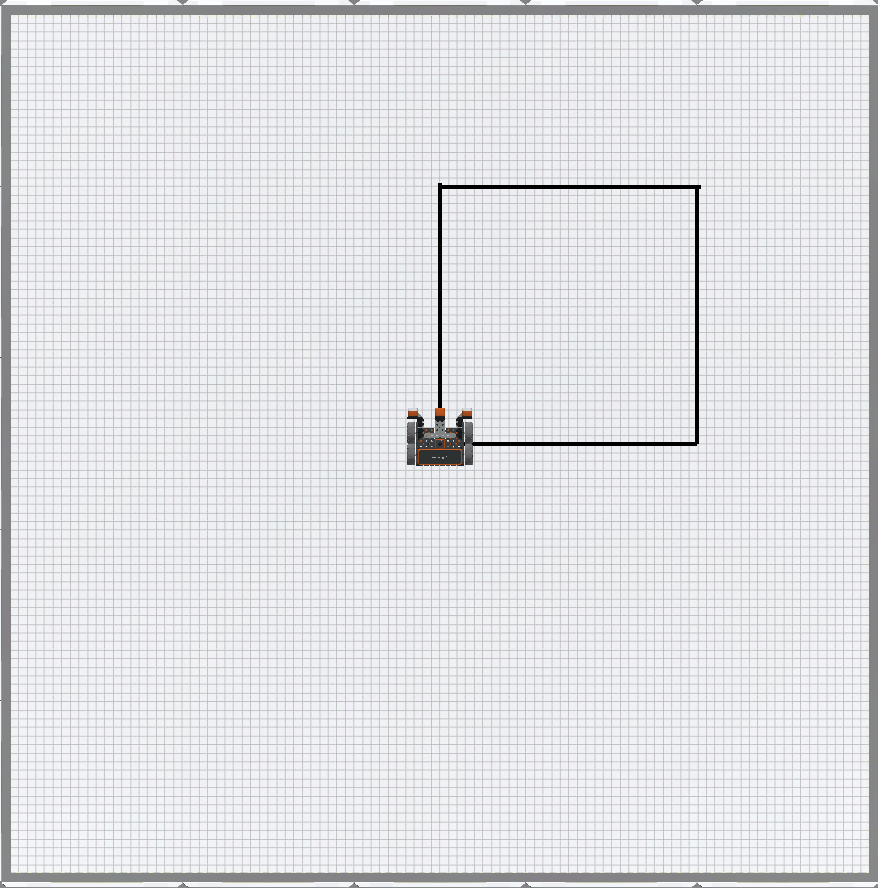
- 아직 열려 있지 않으면 "놀이터 열기" 버튼을 선택하여 아트 캔버스 놀이터 을 열고 프로젝트를 시작하세요.

-
VR 로봇이 앞으로 주행하고 아트 캔버스 놀이터 에서 오른쪽으로 4번 돌아 펜으로 정사각형을 그리는 모습을 지켜보세요.
이 강의의 나머지 부분을 계속하려면 다음 버튼을 선택하세요.