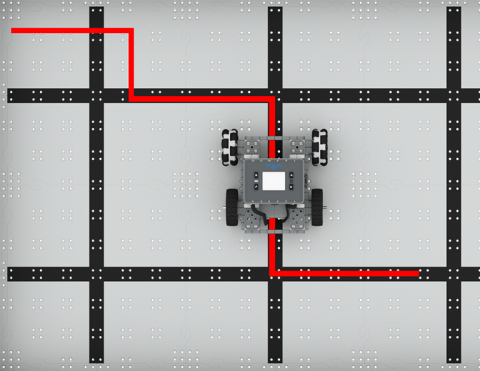
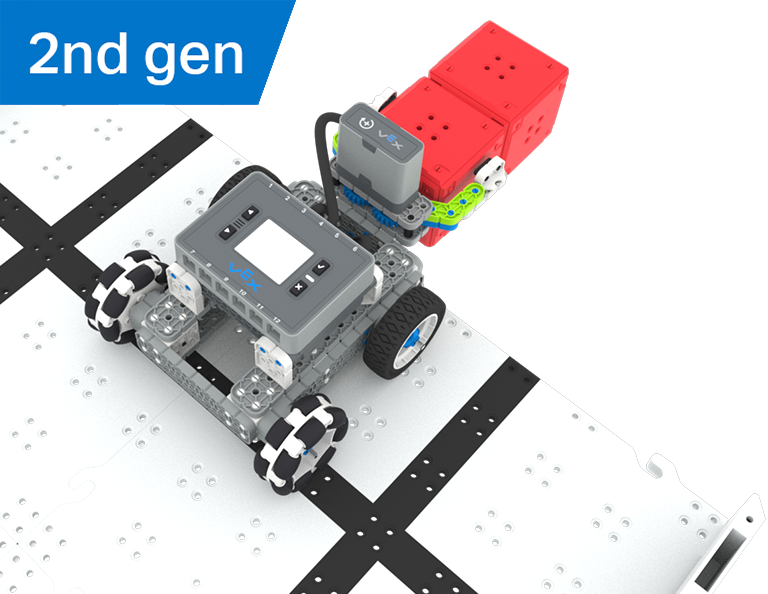
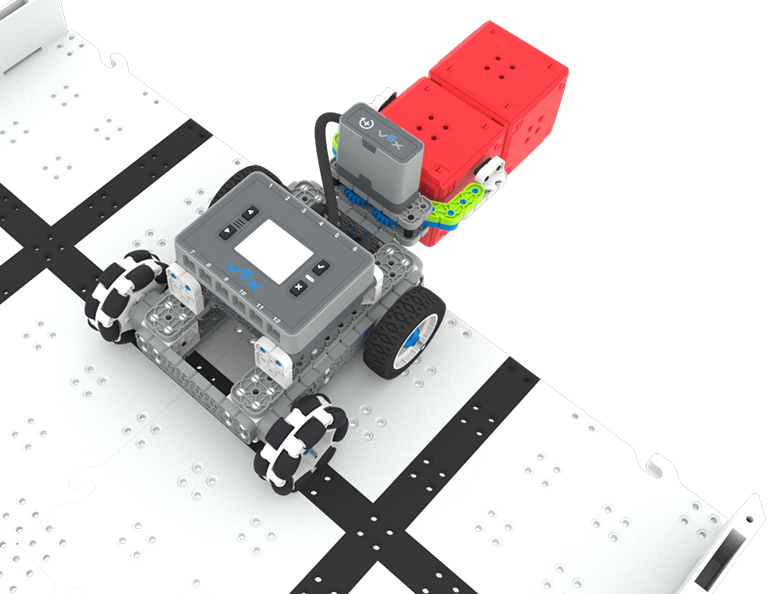
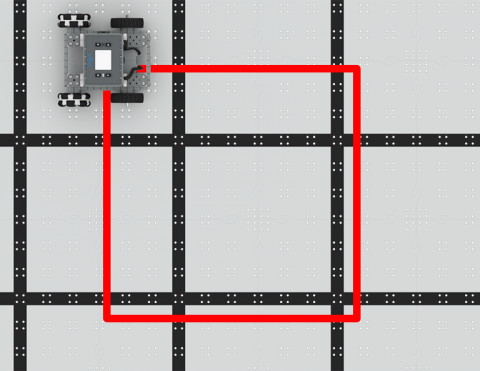
BaseBot을 정사각형으로 주행하도록 코딩하세요!
Activity Link
https://docs.google.com/document/d/1PjJcdqFEAzUDXEQZArGBQu-TdBLhjo275H8JN1Bv5os/edit#
Activity Image
이미지
VEX Platform
Subject
Builds
Activity PDF Link
https://content.vexrobotics.com/assets/education/stem-labs/docs/iq/Activities/IQ Activity - Square Dance.pdf
Activity Docx Link
https://content.vexrobotics.com/assets/education/stem-labs/docs/iq/Activities/IQ Activity - Square Dance.docx
Activity Image Alt
표시된 정사각형 모양을 따라 주행하는 IQ 필드 위의 IQ BaseBot을 위에서 내려다본 모습.