
പാഠം 2: ഒന്നിലധികം ലൂപ്പുകൾ ഉപയോഗിക്കൽ
വാൾ മേസിലൂടെ തുടരുന്നു
ഇപ്പോൾ നമ്മൾ ബമ്പർ സെൻസറുള്ള ഒരുwhileലൂപ്പ് ഉപയോഗിച്ചു, VR റോബോട്ട് ഭിത്തിയിൽ എത്തുമ്പോൾ ഡ്രൈവിംഗ് നിർത്തുന്നു. എന്നിരുന്നാലും, വാൾ മേസിലൂടെ മുന്നോട്ട് പോകാൻ, VR റോബോട്ടിന് ഒരു ഭിത്തിയിൽ എത്തുമ്പോൾതിരിവ്ആവശ്യമാണ്, അങ്ങനെ അതിന് ദിശ മാറ്റാനും മുന്നോട്ട് പോകാനും കഴിയും.
-
ആരംഭിക്കുന്നതിന്,whileലൂപ്പിന് പുറത്തുള്ള stop കമാൻഡ് നീക്കം ചെയ്യുക, തുടർന്ന് turn_forകമാൻഡ് ഉപയോഗിച്ച് അത് മാറ്റിസ്ഥാപിക്കുക. വിആർ റോബോട്ട് 90 ഡിഗ്രി ഇടത്തേക്ക് തിരിയാൻ പാരാമീറ്ററുകൾ സജ്ജമാക്കുക. നിങ്ങളുടെ പ്രോജക്റ്റ് ഇപ്പോൾ ഇതുപോലെ ആയിരിക്കണം:
def main(): left_bumper.pressed( അല്ലാത്തപ്പോൾ): drivetrain.drive(FORWARD) wait(5, MSEC) drivetrain.turn_for(LEFT, 90, DEGREES) - Wall Maze Playground തുറന്നിട്ടില്ലെങ്കിൽ അത് സമാരംഭിച്ച് പ്രോജക്റ്റ് പ്രവർത്തിപ്പിക്കുക.
-
വാൾ മെയ്സിന്റെ തുടക്കം മുതൽ VR റോബോട്ട് ഡ്രൈവ് ചെയ്യുന്നത് കാണുക, ബമ്പർ സെൻസർ ഭിത്തിയിൽ അമർത്തുമ്പോൾ നിർത്തുക, തുടർന്ന് 90 ഡിഗ്രി ഇടത്തേക്ക് തിരിയുക.

ഒന്നിലധികം ലൂപ്പുകളും വാൾ മേസ് പ്രശ്നവും
ഇപ്പോൾ വിആർ റോബോട്ട് ഒരു മതിലിനടുത്തെത്തി, ആ മസിലിലൂടെ സഞ്ചരിക്കാൻ കഴിയുന്ന തരത്തിൽ തിരിഞ്ഞു. മേസിലെ ഈ ആദ്യ ഘട്ടത്തിനായി ലൂപ്പിലും ലൂപ്പിലും ബമ്പർ സെൻസർ ഡാറ്റ ഉപയോഗിച്ചതുപോലെ, VR റോബോട്ടിനെ മേസിലൂടെ തുടരാൻ സഹായിക്കുന്നതിന് ഒരേ പ്രോജക്റ്റിൽ അതേ ഘടന നിരവധി തവണ ഉപയോഗിക്കാം. ഒരേ പ്രോജക്റ്റിൽ ഒന്നിലധികം ഉംലൂപ്പുകളും ഉപയോഗിക്കാം.
-
VR റോബോട്ടിന്റെ നിലവിലെ സ്ഥാനത്ത് നിന്ന് ആരംഭിച്ച്, വാൾ മെയ്സ് പരിഹരിക്കുന്നതിനുള്ള അടുത്ത ഘട്ടം അടുത്ത മതിലിലേക്ക് മുന്നോട്ട് പോയി 90 ഡിഗ്രി വലത്തേക്ക് തിരിയുക എന്നതാണ്. നിലവിലുള്ള കമാൻഡുകൾ മുമ്പത്തെ while loop, turn_for കമാൻഡുകൾക്ക് താഴെ പകർത്തി ഒട്ടിക്കാൻ കഴിയും. ഇൻഡന്റേഷൻ ശ്രദ്ധിക്കാൻ മറക്കരുത്, പുതിയ turn_for കമാൻഡ് പാരാമീറ്ററുകൾ വലത്തേക്ക് 90 ഡിഗ്രി തിരിയാൻ മാറ്റുക. നിങ്ങളുടെ പ്രോജക്റ്റ് ഇപ്പോൾ ഇതുപോലെ ആയിരിക്കണം:
def main(): left_bumper.pressed അല്ലാത്തപ്പോൾ(): drivetrain.drive(FORWARD) wait(5, MSEC) drivetrain.turn_for(LEFT, 90, DEGREES) left_bumper.pressed അല്ലാത്തപ്പോൾ(): drivetrain.drive(FORWARD) wait(5, MSEC) drivetrain.turn_for(RIGHT, 90, DEGREES) - Wall Maze Playground പുനഃസജ്ജമാക്കി പ്രോജക്റ്റ് വീണ്ടും പ്രവർത്തിപ്പിക്കുക.
-
വാൾ മെയ്സിന്റെ തുടക്കം മുതൽ VR റോബോട്ട് ഡ്രൈവ് ചെയ്യുന്നത് കാണുക, ബമ്പർ സെൻസർ ഭിത്തിയിൽ അമർത്തുമ്പോൾ നിർത്തുക, 90 ഡിഗ്രി ഇടത്തേക്ക് തിരിയുക, ബമ്പർ സെൻസർ വീണ്ടും ഒരു ഭിത്തിയിൽ അമർത്തുന്നതുവരെ മുന്നോട്ട് ഡ്രൈവ് ചെയ്യുക, തുടർന്ന് 90 ഡിഗ്രി വലത്തേക്ക് തിരിഞ്ഞ് നിർത്തുക.
മിനി ചലഞ്ച്
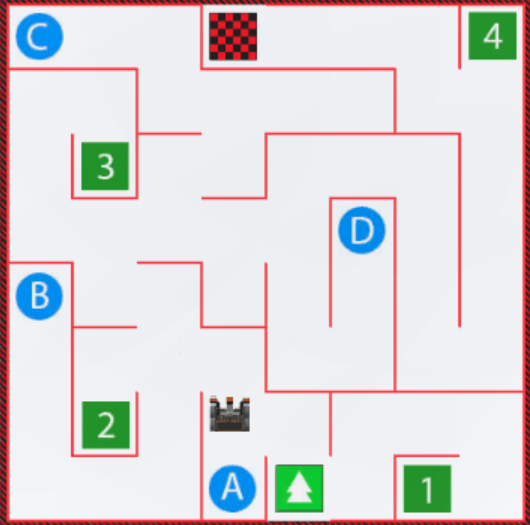
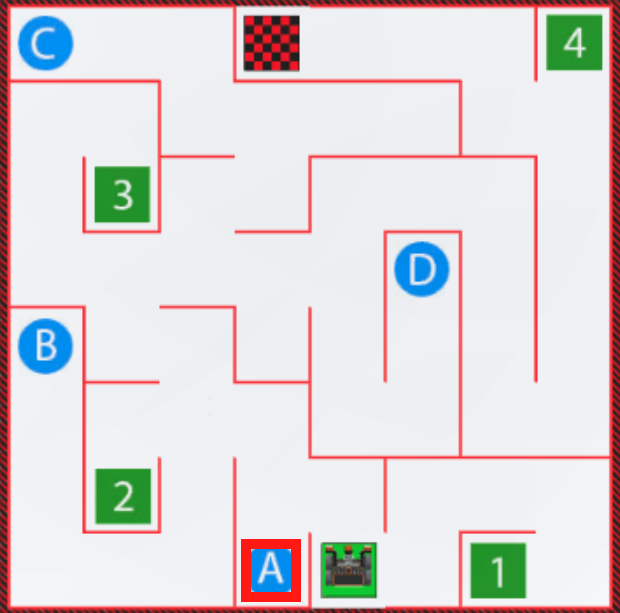
ഈ മിനി ചലഞ്ചിനായി, ഒന്നിലധികം ഉംലൂപ്പുകളും ബമ്പർ സെൻസറും ഉപയോഗിച്ച് വാൾ മെയ്സ് പ്ലേഗ്രൗണ്ട് ൽ VR റോബോട്ട് തുടക്കം മുതൽ 'A' എന്ന അക്ഷരത്തിലേക്ക് ഡ്രൈവ് ചെയ്യുന്ന ഒരു പ്രോജക്റ്റ് സൃഷ്ടിക്കുക!
മിനി ചലഞ്ച് പൂർത്തിയാക്കാൻ ഈ ഘട്ടങ്ങൾ പാലിക്കുക:
-
മിനി ചലഞ്ച് പൂർത്തിയാക്കാൻ വിആർ റോബോട്ട് എങ്ങനെ ഡ്രൈവ് ചെയ്യണമെന്ന് കാണാൻ താഴെയുള്ള പരിഹാര വീഡിയോ കാണുക. ഈ വീഡിയോ ക്ലിപ്പിൽ, പ്ലേഗ്രൗണ്ടിന്റെ താഴത്തെ മധ്യഭാഗത്ത് വിആർ റോബോട്ട് ആരംഭിക്കുന്നു. ബമ്പർ സെൻസർ എതിർവശത്തെ ഭിത്തിയിൽ അമർത്തുന്നതുവരെ അത് മുന്നോട്ട് നീങ്ങുന്നു, തുടർന്ന് ഇടത്തേക്ക് തിരിഞ്ഞ് അതിനു മുന്നിലുള്ള അടുത്ത ഭിത്തിയിലേക്ക് നീങ്ങുന്നു. ആ ഭിത്തിയിൽ ബമ്പർ അമർത്തുമ്പോൾ, റോബോട്ട് വീണ്ടും ഇടത്തേക്ക് തിരിഞ്ഞ് അവസാന ഭിത്തിയിലും A എന്ന അക്ഷരത്തിലും എത്തുന്നതുവരെ മുന്നോട്ട് നീങ്ങുന്നു.
- Unit4Lesson2 പ്രോജക്റ്റിലേക്ക് ആവശ്യമായ കമാൻഡുകൾ ചേർത്തോ നീക്കം ചെയ്തോ ഒരു പ്രോജക്റ്റ് സൃഷ്ടിക്കുക.
- അത് പരീക്ഷിക്കുന്നതിനായി പ്രോജക്റ്റ് ആരംഭിക്കുക.
- പ്രോജക്റ്റ് വിജയിച്ചില്ലെങ്കിൽ, എഡിറ്റ് ചെയ്ത് വീണ്ടും ശ്രമിക്കുക. വി.ആർ. റോബോട്ട് തുടക്കം മുതൽ 'A' എന്ന അക്ഷരത്തിലേക്ക് വിജയകരമായി നീങ്ങുന്നത് വരെ പദ്ധതി പരിഷ്കരിച്ച് പ്രവർത്തിപ്പിക്കുന്നത് തുടരുക.
- വി.ആർ. റോബോട്ട് തുടക്കം മുതൽ 'A' എന്ന അക്ഷരത്തിലേക്ക് വിജയകരമായി ഡ്രൈവ് ചെയ്തുകഴിഞ്ഞാൽ പ്രോജക്റ്റ് സേവ് ചെയ്യുക.
അഭിനന്ദനങ്ങൾ! നിങ്ങൾ മിനി ചലഞ്ച് പരിഹരിച്ചു!
ചോദ്യങ്ങൾ
പാഠ ക്വിസ് ആക്സസ് ചെയ്യുന്നതിന് താഴെയുള്ള ലിങ്ക് തിരഞ്ഞെടുക്കുക.