
পাঠ ২: একাধিক While লুপ ব্যবহার করা
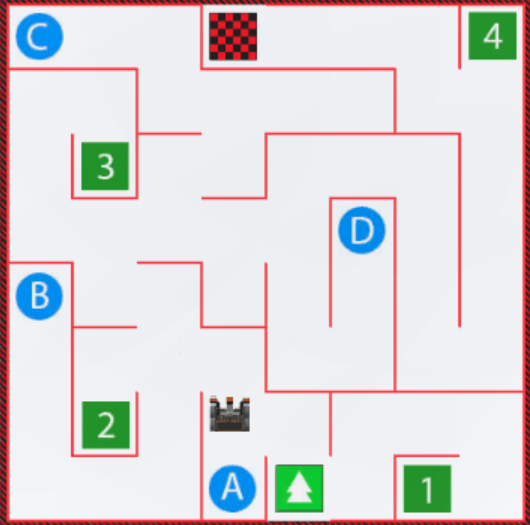
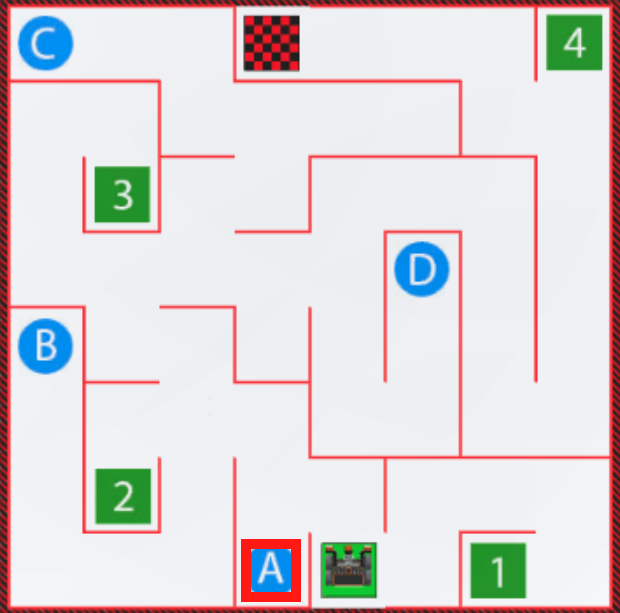
ওয়াল মেজ এর মধ্য দিয়ে এগিয়ে যাওয়া
এখন আমরা বাম্পার সেন্সর সহwhileলুপ ব্যবহার করেছি যাতে VR রোবটটি দেয়ালে পৌঁছালে গাড়ি চালানো বন্ধ করে দেয়। তবে, ওয়াল মেজ-এর মধ্য দিয়ে এগিয়ে যাওয়ার জন্য, ভিআর রোবটটিকে যখন কোনও দেয়ালে পৌঁছাবে তখনঘুরতে হবে, যাতে এটি দিক পরিবর্তন করে এগিয়ে যেতে পারে।
-
শুরু করতে,whileলুপের বাইরে stop কমান্ডটি সরিয়ে ফেলুন এবং এটিকে turn_forকমান্ড দিয়ে প্রতিস্থাপন করুন। VR রোবট যাতে 90 ডিগ্রি বাম দিকে ঘুরতে পারে তার জন্য প্যারামিটারগুলি সেট করুন। আপনার প্রকল্পটি এখন এইরকম দেখা উচিত:
def main(): while not left_bumper.pressed(): drivetrain.drive(FORWARD) wait(5, MSEC) drivetrain.turn_for(LEFT, 90, DEGREES) - ওয়াল মেজ খেলার মাঠ চালু করুন যদি এটি ইতিমধ্যে খোলা না থাকে এবং প্রকল্পটি চালান।
-
ওয়াল মেজের শুরু থেকেই ভিআর রোবটের ড্রাইভ দেখুন, বাম্পার সেন্সরটি দেয়ালে চাপ দিলে থামুন এবং 90 ডিগ্রি বাম দিকে ঘুরুন।

একাধিক লুপ এবং ওয়াল মেজ সমস্যা
এখন VR রোবট একটি প্রাচীরে পৌঁছেছে, এবং ঘুরিয়েছে যাতে এটি গোলকধাঁধা দিয়ে গাড়ি চালিয়ে যেতে পারে। গোলকধাঁধার এই প্রথম ধাপের জন্য while লুপে যেভাবে বাম্পার সেন্সর ডেটা ব্যবহার করা হয়েছিল, একই কাঠামো একই প্রকল্পে বেশ কয়েকবার ব্যবহার করা যেতে পারে যাতে VR রোবট গোলকধাঁধার মধ্য দিয়ে চলতে পারে। একই প্রকল্পে একাধিক এবংলুপ ব্যবহার করা যেতে পারে।
-
VR রোবটের বর্তমান অবস্থান থেকে শুরু করে, ওয়াল গোলকধাঁধা সমাধানের পরবর্তী ধাপটি পরবর্তী প্রাচীরের দিকে এগিয়ে যাওয়া এবং 90 ডিগ্রি ডানদিকে ঘুরতে হবে। বিদ্যমান কমান্ডগুলি পূর্ববর্তী নীচে কপি এবং পেস্ট করা যেতে পারে যখন লুপ এবং টার্ন_ফর কমান্ড। ইন্ডেন্টেশনের ব্যাপারে সচেতন থাকতে ভুলবেন না, এবং নতুন turn_for কমান্ড প্যারামিটার পরিবর্তন করে 90 ডিগ্রি ডানে ঘুরতে হবে। আপনার প্রকল্পটি এখন এইরকম দেখা উচিত:
def main(): while not left_bumper.pressed(): drivetrain.drive(FORWARD) wait(5, MSEC) drivetrain.turn_for(LEFT, 90, DEGREES) while not left_bumper.pressed(): drivetrain.drive(FORWARD) wait(5, MSEC) drivetrain.turn_for(RIGHT, 90, DEGREES) - ওয়াল মেজ খেলার মাঠ রিসেট করুন এবং আবার প্রকল্প চালান।
-
ওয়াল মেজের শুরু থেকেই ভিআর রোবটের ড্রাইভ দেখুন, বাম্পার সেন্সরটি দেয়ালে চাপ দিলে থামুন, 90 ডিগ্রি বাম দিকে ঘুরুন, বাম্পার সেন্সরটি আবার দেয়ালে চাপ না দেওয়া পর্যন্ত এগিয়ে যান, তারপর 90 ডিগ্রি ডানদিকে ঘুরুন এবং থামুন।
মিনি চ্যালেঞ্জ
এই মিনি চ্যালেঞ্জের জন্য, এমন একটি প্রকল্প তৈরি করুন যেখানে VR রোবট Wall Maze Playground এ শুরু থেকে 'A' অক্ষরে একাধিক এবংলুপ এবং বাম্পার সেন্সর ব্যবহার করে ড্রাইভ করবে!
মিনি চ্যালেঞ্জ সম্পূর্ণ করতে এই পদক্ষেপগুলি অনুসরণ করুন:
-
মিনি চ্যালেঞ্জটি সম্পূর্ণ করার জন্য ভিআর রোবট কীভাবে গাড়ি চালাবে তা জানতে নীচের সমাধান ভিডিওটি দেখুন। এই ভিডিও ক্লিপে, ভিআর রোবটটি খেলার মাঠের নীচের কেন্দ্রে শুরু হয়। এটি সামনের দিকে এগিয়ে যায় যতক্ষণ না বাম্পার সেন্সরটি বিপরীত দেয়ালে চাপ দেওয়া হয়, তারপর বাম দিকে ঘুরতে থাকে এবং এর সামনের পরবর্তী দেয়ালে চলে যায়। যখন বাম্পারটি সেই দেয়ালে চাপ দেওয়া হয়, তখন রোবটটি আবার বাম দিকে ঘুরবে এবং শেষ দেয়ালে এবং A অক্ষরে পৌঁছানো পর্যন্ত এগিয়ে যাবে।
- Unit4Lesson2 প্রকল্পে প্রয়োজনীয় কমান্ড যোগ করে বা সরিয়ে একটি প্রকল্প তৈরি করুন।
- এটি পরীক্ষা করার জন্য প্রকল্পটি শুরু করুন।
- প্রকল্প সফল না হলে, সম্পাদনা করুন এবং আবার চেষ্টা করুন। ভিআর রোবটটি শুরু থেকে 'এ' অক্ষর পর্যন্ত সফলভাবে ড্রাইভ না করা পর্যন্ত প্রকল্পটি সংশোধন এবং পরিচালনা চালিয়ে যান।
- VR রোবটটি শুরু থেকে 'A' অক্ষরে সফলভাবে ড্রাইভ করার পরে প্রকল্পটি সংরক্ষণ করুন।
অভিনন্দন! আপনি মিনি চ্যালেঞ্জ সমাধান করেছেন!