
തീരുമാനമെടുക്കൽ - പൈത്തൺ
![]() അധ്യാപക ഉപകരണപ്പെട്ടി
-
ഈ വായനയുടെ ഉദ്ദേശ്യം
അധ്യാപക ഉപകരണപ്പെട്ടി
-
ഈ വായനയുടെ ഉദ്ദേശ്യം
റോബോട്ടിനെ അത് കണ്ടെത്തുന്ന സാഹചര്യങ്ങളോട് പ്രതികരിക്കുന്ന തരത്തിൽ പ്രോഗ്രാം ചെയ്യുന്നതിലാണ് ഈ STEM ലാബ് ശ്രദ്ധ കേന്ദ്രീകരിക്കുന്നത്. കണ്ടീഷണലുകൾ, ബൂളിയൻ (TRUE അല്ലെങ്കിൽ FALSE) അവസ്ഥകൾ, ഒരു പ്രോജക്റ്റിനുള്ളിൽ ഈ പ്രോഗ്രാമിംഗ് ഘടനകൾ ഉൾപ്പെടുത്തുന്നതിന്റെ പ്രയോജനം എന്നിവയെക്കുറിച്ചുള്ള ആശയം അവതരിപ്പിക്കുന്നതിനാണ് ഈ ആദ്യ വായന ഉദ്ദേശിക്കുന്നത്. കണ്ടീഷണൽ പ്രോഗ്രാമിംഗ് ഉൾപ്പെടുത്തുന്നത് റോബോട്ട് അതിന്റെ പരിസ്ഥിതിയോട് എങ്ങനെ പ്രതികരിക്കുന്നു എന്നത് മെച്ചപ്പെടുത്തുമെന്ന് വിദ്യാർത്ഥികൾ തിരിച്ചറിയാൻ തുടങ്ങണം.
ഒരു റോബോട്ടിനെ നിരീക്ഷിക്കുമ്പോൾ, അത് സ്വന്തം പെരുമാറ്റത്തെക്കുറിച്ച് തീരുമാനങ്ങൾ എടുക്കുന്നതായി തോന്നിയേക്കാം, പക്ഷേ പ്രോഗ്രാമിംഗിനുള്ളിൽ, അത് സാഹചര്യങ്ങൾ പരിശോധിച്ച് ഉചിതമായ നടപടിയെടുക്കുന്നു. സാഹചര്യങ്ങൾ അവരുടെ സ്വന്തം അറിവോടെയുള്ള തീരുമാനങ്ങളെ എങ്ങനെ സ്വാധീനിക്കുന്നുവെന്ന് വിദ്യാർത്ഥികൾക്ക് പരിഗണിക്കാം.
എടുക്കേണ്ട തീരുമാനം:ഞാൻ കുട എടുക്കണോ?
നിലവിലെ അവസ്ഥ:മഴ പെയ്യാൻ സാധ്യതയുണ്ട് (ശരി).
തീരുമാനം: കുട എടുക്കുക.

തീരുമാനമെടുക്കൽ
ഏറ്റവും അടിസ്ഥാനപരമായ തലത്തിൽ, പ്രോഗ്രാമുകൾ എഴുതപ്പെടുന്നത് പെരുമാറ്റത്തിന്റെ ലളിതമായ ക്രമങ്ങൾ നിർവ്വഹിക്കുന്നതിനാണ്. ഉദാഹരണത്തിന്, നിങ്ങളുടെ റോബോട്ട് മുന്നോട്ട് ഓടിച്ച് ഒരു ലക്ഷ്യസ്ഥാനത്ത് എത്താൻ ചില തിരിവുകൾ വരുത്തണമെന്ന് നിങ്ങൾ ആഗ്രഹിച്ചേക്കാം. പക്ഷേ, നിങ്ങളുടെ റോബോട്ട് മുന്നോട്ട് ഓടാൻ തുടങ്ങുന്നതിനും അതിന്റെ റൂട്ട് പൂർത്തിയാക്കുന്നതിനും ശരിയായ സമയത്തിനായി കാത്തിരിക്കണമെന്ന് നിങ്ങൾ ആഗ്രഹിക്കുന്നുവെങ്കിലോ? അതിന് കണ്ടീഷണൽ സ്റ്റേറ്റ്മെന്റുകൾ ഉള്ള പ്രോഗ്രാമിംഗ് ആവശ്യമായി വരും. നിങ്ങളുടെ പ്രോജക്റ്റിൽ "ആരംഭിക്കാൻ ശരിയായ സമയം" എന്താണെന്ന് നിർവചിക്കാൻ നിങ്ങൾ ഒരു കണ്ടീഷണൽ സ്റ്റേറ്റ്മെന്റ് ഉപയോഗിക്കും. ഒരു ബട്ടൺ അമർത്തിയാൽ അല്ലെങ്കിൽ ഒരു സെൻസർ ഒരു പ്രത്യേക ലെവൽ കണ്ടെത്തി അത് ഓടിക്കാൻ തുടങ്ങുമ്പോൾ ആയിരിക്കാം "ശരിയായ സമയം". റോബോട്ടിന്റെ പെരുമാറ്റം കാണുമ്പോൾ, അത് എപ്പോൾ ഡ്രൈവിംഗ് ആരംഭിക്കണമെന്ന് തീരുമാനിക്കുന്നത് പോലെ തോന്നും, പക്ഷേ ഡ്രൈവിംഗ് എപ്പോൾ ആരംഭിക്കണം എന്ന വ്യവസ്ഥ നിങ്ങൾ സജ്ജമാക്കിയതുകൊണ്ടാണ്.
കണ്ടീഷണൽ സ്റ്റേറ്റ്മെന്റുകൾ എന്നത് ഒരു ബൂളിയൻ (TRUE അല്ലെങ്കിൽ FALSE) അവസ്ഥ ഉപയോഗിക്കുന്ന ശക്തമായ പ്രോഗ്രാമിംഗ് സ്റ്റേറ്റ്മെന്റുകളാണ്. മുകളിലുള്ള അതേ ഉദാഹരണ സാഹചര്യം ഉപയോഗിച്ച്, നിങ്ങളുടെ റോബോട്ടിന്റെ ബ്രെയിൻ സ്ക്രീൻ അമർത്തിയിട്ടുണ്ടോ എന്ന് ആവർത്തിച്ച് പരിശോധിക്കുന്നതിനും അങ്ങനെ അമർത്തുമ്പോൾ മുന്നോട്ട് ഓടുന്നതിനും പ്രോഗ്രാം ചെയ്യാം. ആ പ്രോജക്റ്റിലെ കണ്ടീഷണൽ സ്റ്റേറ്റ്മെന്റ്, "സ്ക്രീൻ അമർത്തിയെന്ന് കണ്ടെത്തിയാൽ (TRUE), ഡ്രൈവിംഗ് സീക്വൻസ് പ്രവർത്തിപ്പിക്കുക" എന്നതിന് സമാനമായ എന്തെങ്കിലും വായിക്കാം. അവസ്ഥ തെറ്റാണെങ്കിൽ (സ്ക്രീൻഅല്ലഅമർത്തിയിരിക്കുന്നു) ഒരു പെരുമാറ്റത്തെയും കുറിച്ച് ഈ പ്രസ്താവന പരാമർശിക്കുന്നില്ല, അതിനാൽ തെറ്റാണെങ്കിൽ റോബോട്ട് ഒരു നടപടിയും സ്വീകരിക്കുന്നില്ല. റോബോട്ട് എന്ത് മനസ്സിലാക്കുന്നു എന്നതിനെ ആശ്രയിച്ച് വ്യത്യസ്തമായി പെരുമാറുന്ന പ്രോജക്ടുകൾ വികസിപ്പിക്കാൻ കണ്ടീഷണൽ സ്റ്റേറ്റ്മെന്റുകൾ നിങ്ങളെ അനുവദിക്കുന്നു. ബൂളിയൻ ലോജിക്കിനെക്കുറിച്ചുള്ള കൂടുതൽ വിവരങ്ങൾക്ക്, ഇനിപ്പറയുന്ന ലിങ്കുകളിൽ ഒന്ന് ക്ലിക്കുചെയ്യുക (Google Doc / .docx / .pdf).
താഴെ കൊടുത്തിരിക്കുന്ന ഉദാഹരണത്തിൽ, തലച്ചോറിന്റെ സ്ക്രീൻ അമർത്തിയാൽ (TRUE) റോബോട്ട് മുന്നോട്ട് പോകും. തലച്ചോറിന്റെ സ്ക്രീൻ അമർത്തിയില്ലെങ്കിൽ (തെറ്റ്) റോബോട്ട് ഡ്രൈവിംഗ് നിർത്തും. തലച്ചോറിന്റെ സ്ക്രീൻ അമർത്തുമ്പോൾ മാത്രമേ റോബോട്ട് മുന്നോട്ട് ഓടുന്നുള്ളൂ എന്നും അല്ലാത്തപക്ഷം റോബോട്ട് നിർത്തുന്നുവെന്നും ഇത് കാണിക്കുന്നു.
# പ്രോജക്റ്റ് കോഡ്
ആരംഭിക്കുമ്പോൾ True:
brain.screen.pressing():
drivetrain.drive(FORWARD) ആണെങ്കിൽ
else:
drivetrain.stop()
wait(5, MSEC)
![]() അധ്യാപക നുറുങ്ങുകൾ
-
ഓട്ടോകംപ്ലീറ്റ് ഉപയോഗിക്കൽ
അധ്യാപക നുറുങ്ങുകൾ
-
ഓട്ടോകംപ്ലീറ്റ് ഉപയോഗിക്കൽ
നിങ്ങൾ ടൈപ്പ് ചെയ്യുന്ന കമാൻഡിന്റെ ബാക്കി ഭാഗങ്ങൾ പ്രവചിക്കുന്ന VEXcode V5 ലെ ഒരു സവിശേഷതയാണ് ഓട്ടോകംപ്ലീറ്റ്. വിദ്യാർത്ഥികൾ VEXcode V5-ൽ പ്രവർത്തിക്കുന്നതിനാൽ, പൈത്തൺ വാക്യഘടനയിൽ സഹായിക്കുന്നതിന് ഓട്ടോകംപ്ലീറ്റ് സവിശേഷത ഉപയോഗിക്കാൻ അവരെ പ്രോത്സാഹിപ്പിക്കുക. നിങ്ങൾ നിർദ്ദേശം ടൈപ്പ് ചെയ്യാൻ തുടങ്ങുമ്പോൾ ഒരു ഓട്ടോകംപ്ലീറ്റ് ഫംഗ്ഷൻ നിങ്ങൾ ശ്രദ്ധിച്ചേക്കാം. നിങ്ങൾക്ക് ആവശ്യമുള്ള പേര് തിരഞ്ഞെടുക്കാൻ നിങ്ങളുടെ "Up", "Down" കീകൾ ഉപയോഗിക്കുക, തുടർന്ന് തിരഞ്ഞെടുക്കാൻ നിങ്ങളുടെ കീബോർഡിൽ "Tab" അല്ലെങ്കിൽ (Enter/Return) അമർത്തുക. ഓട്ടോകംപ്ലീറ്റ് ഉപയോഗിക്കുന്നതിനെക്കുറിച്ചുള്ള കൂടുതൽ വിവരങ്ങൾക്ക് പൈത്തൺ ലേഖനംപരിശോധിക്കുക.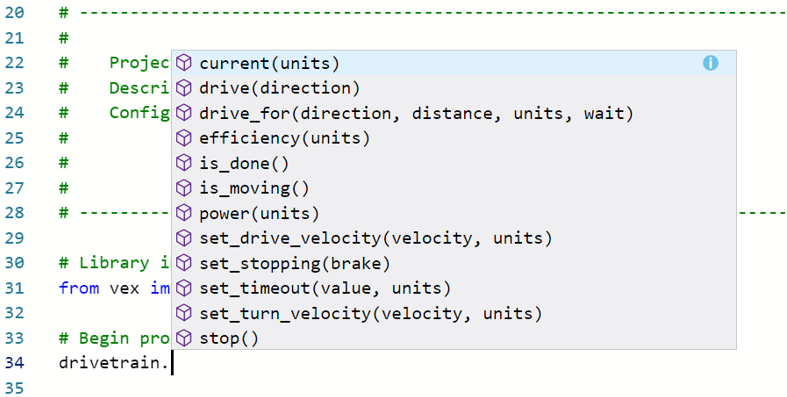
![]() നിങ്ങളുടെ പഠനം വിപുലീകരിക്കുക
നിങ്ങളുടെ പഠനം വിപുലീകരിക്കുക
ഈ പ്രവർത്തനം വികസിപ്പിക്കുന്നതിന്, നിങ്ങളുടെ വിദ്യാർത്ഥികളോട് ടീമുകളായി തിരിഞ്ഞ് മറ്റൊരു ടീമിന് പൂർത്തിയാക്കുന്നതിനായി ഒരു മേജിന്റെ ഒരു രേഖാചിത്രം തയ്യാറാക്കാൻ ആവശ്യപ്പെടുക. മേജിന് കുറഞ്ഞത് മൂന്ന് മുതൽ അഞ്ച് വരെ കണ്ടീഷണൽ സ്റ്റേറ്റ്മെന്റുകൾ ആവശ്യമാണ്. ഉദാഹരണത്തിന്, 'ഒരു മതിൽ ഉണ്ടാകുന്നതുവരെ മുന്നോട്ട് പോകുക'. പിന്നെ, ഇടത്തേക്ക് തിരിയുക. വിദ്യാർത്ഥികൾ ഫ്ലോചാർട്ട് രൂപത്തിൽ മേസിനുള്ള ഒരു പരിഹാരം എഴുതണം. തുടർന്ന് വിദ്യാർത്ഥികൾ മറ്റൊരു ടീമുമായി മേസുകൾ കൈമാറ്റം ചെയ്യണം, അവർ ഫ്ലോചാർട്ട് രൂപത്തിൽ മേസിന് ഒരു പരിഹാരം സൃഷ്ടിക്കണം. രണ്ട് ടീമുകളും എത്രത്തോളം പൊരുത്തപ്പെടുന്നുവെന്ന് കാണാൻ ഉത്തരങ്ങൾ താരതമ്യം ചെയ്യണം.
ഈ പ്രവർത്തനത്തെ ഓൺലൈൻ അല്ലെങ്കിൽ മൊബൈൽ ഗെയിമുകളുമായി ബന്ധപ്പെടുത്തുന്നതിന്, നിങ്ങളുടെ വിദ്യാർത്ഥികളോട് അവരുടെ പ്രിയപ്പെട്ട ഗെയിം/ആപ്പിന്റെ ലക്ഷ്യം വിവരിക്കാൻ ആവശ്യപ്പെടുക. തുടർന്ന് വിദ്യാർത്ഥികൾ ഗെയിമിൽ പിന്തുടരുന്ന ആദ്യത്തെ പത്ത് അതെ/ഇല്ല അല്ലെങ്കിൽ ശരി/തെറ്റ് തീരുമാനങ്ങളുടെ രൂപരേഖ തയ്യാറാക്കാൻ അവരെ അനുവദിക്കുക.