
Programming with Conditionals - Blocks-based
| Quantity | Materials Needed |
|---|---|
| 1 |
VEX V5 Classroom Starter Kit (with up-to-date firmware) |
| 1 |
VEXcode V5 (latest version, Windows, macOS, Chromebook) |
| 1 |
Engineering Notebook |
| 1 |
Clawbot (Drivetrain 2-motor, No Gyro) Template |
The Clawbot is ready to make decisions!
This activity will give you the tools to program your robot with conditional behaviors.
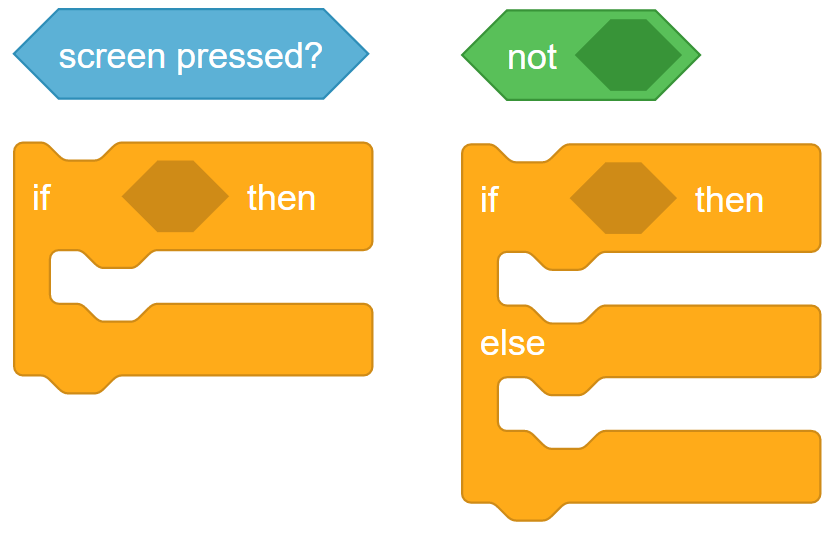
The [If then] and [If then else] blocks are the main focus within the activity but Operators and Sensing blocks are also used.
You can use the Help information inside of VEXcode V5 to learn about the blocks. For guidance in using the Help feature, see the Using Help tutorial.

Step 1: Let's start with an understanding of conditional statements
Before you begin programming with conditionals, first watch the If-Then-Else tutorial video below. It can also be found as a Tutorial video in VEXcode V5.
Step 2: Let's start programming with conditional statements
Open the Clawbot (Drivetrain 2-motor, No Gyro) template example project.
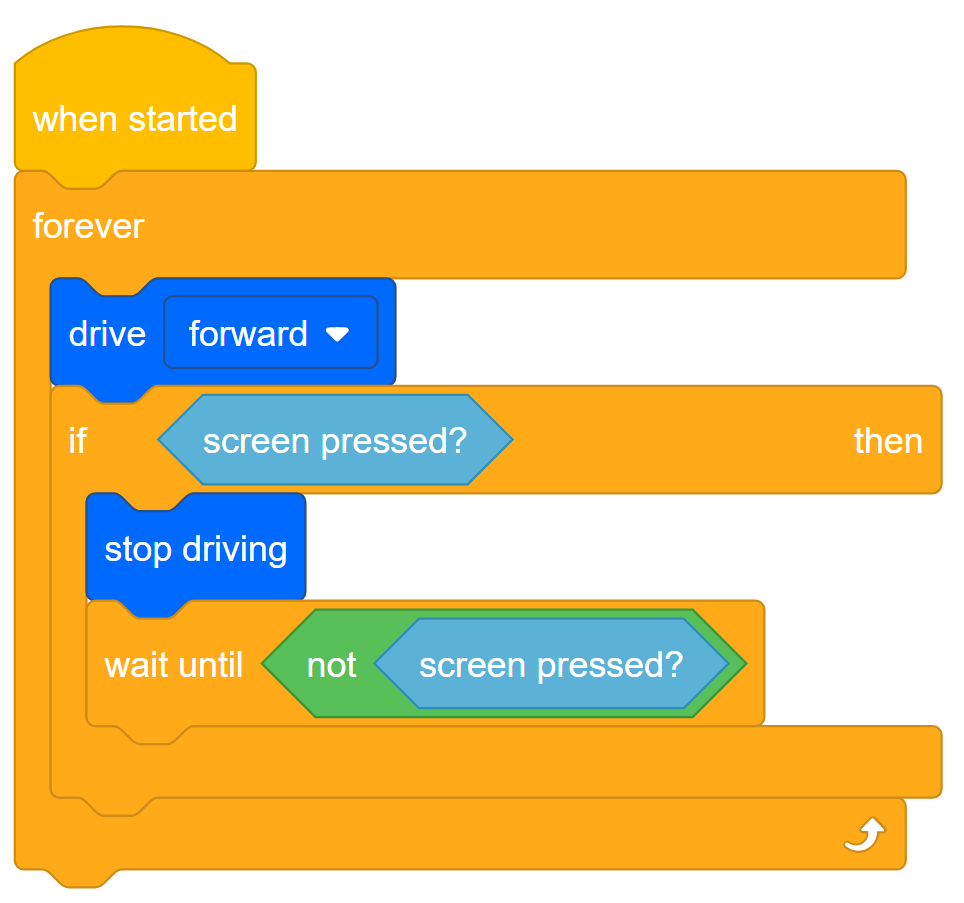
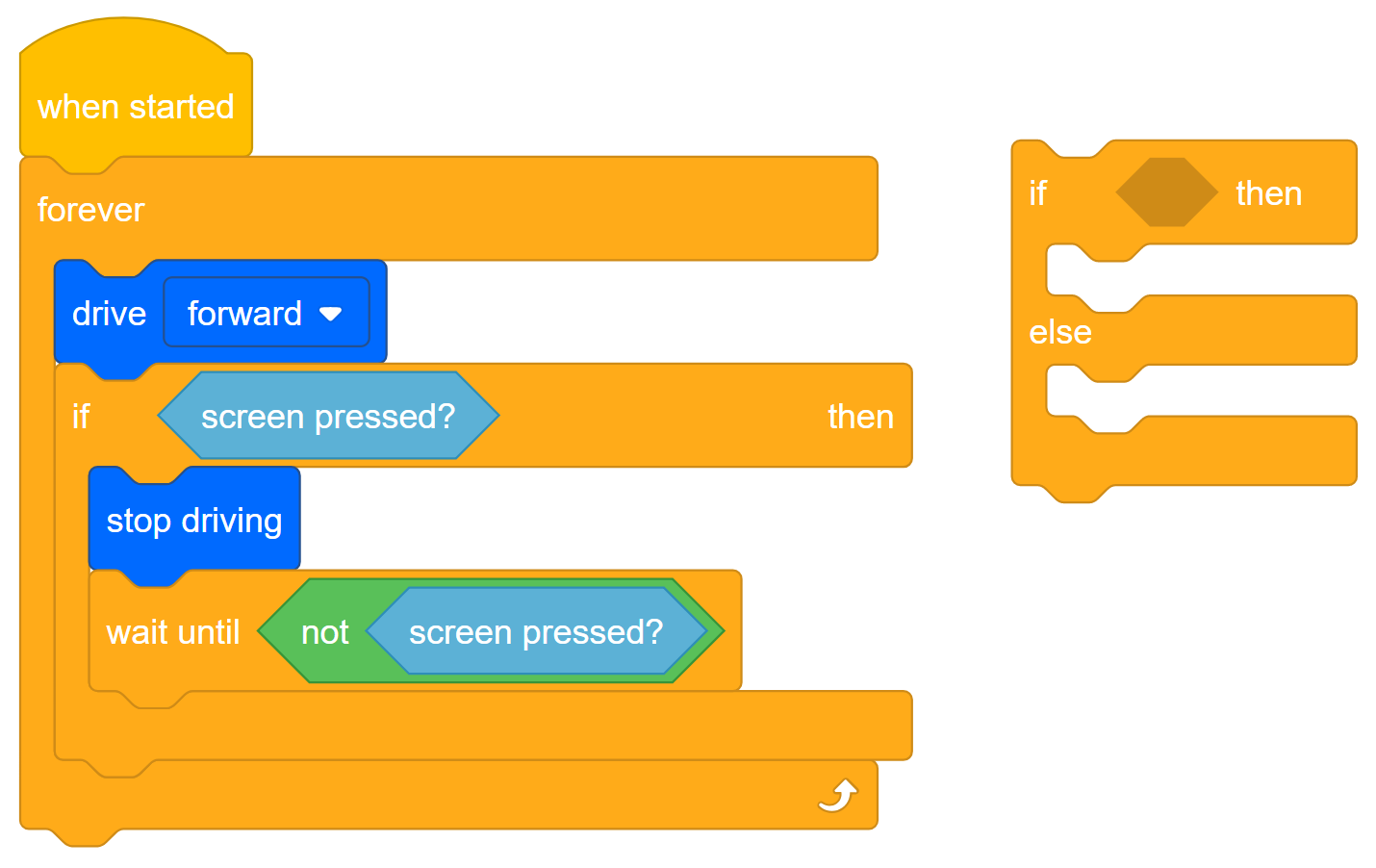
Build the project below.
Do the following in your engineering notebook:
- Explain what the project has the Clawbot do. You will need to explain more than the fact that it creates a stop button. Explain which blocks make the Clawbot do what.
- Write a one sentence summary that captures what the project does.

- Test to see if your prediction of what the project has the Clawbot do is correct.
- Save and download the project as Creating a Stop Button to Slot 1 on the Clawbot, and then run it.
- For help downloading a project, see the tutorial in VEXcode V5 that explains how to Download and Run a Project.
- Check your explanations of the project and add notes to correct them as needed.
Step 3: Understanding the wait until block
Notice that if the Brain's screen is pressed, the flow of the project moves so quickly that the project will move to the next block, which is the [Stop driving] block.
Thus, the project needs a [Wait until] block that tells the robot to remain stopped until the Brain's screen is released. Otherwise, the [Forever] block would cause the project to begin again with the [Drive] block.
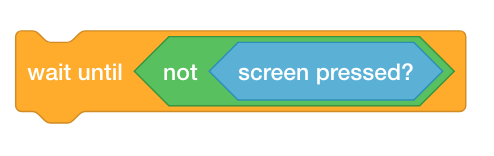
The [Wait until] block is necessary because of the speed of the project's flow. If it was not there, the project would move to the next block before the robot ever had time to respond
Step 4: Change the project
Our next step is changing the [If then] block to an [If then else] block.
- Start by saving Creating a Stop Button as the new project, StopOrDrive.
- If you need help saving a project, see the Naming and Saving Your Project tutorial in VEXcode V5.
- Then build the StopOrDrive project shown below.
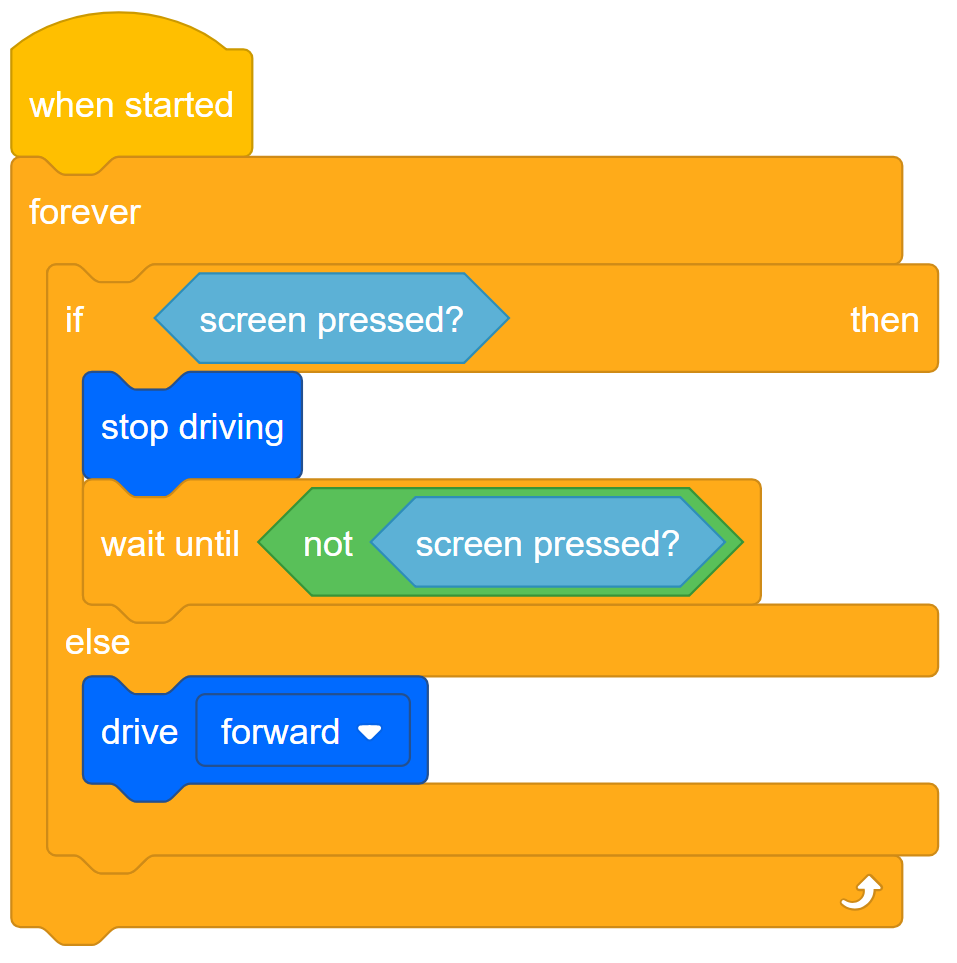
- Download StopOrDrive to Slot 2 on your Clawbot.
- For help downloading a project, see the tutorial in VEXcode V5 that explains how to Download and Run a Project.
- Test Creating a Stop Button (Slot 1) and then test StopOrDrive (Slot 2) and compare them to see if there are any difference in the robot's behavior. Note any differences in your engineering notebook.
The two projects have the Clawbot behave the same way. The only difference is the use of the [If then else] block in the StopOrDrive project.
Using the [If then else] block will allow you to add additional buttons to the screen in upcoming activities.