
Concurreren
Nu je het ontwerp van je klauw hebt uitgewerkt en hebt geoefend met het oppakken en verplaatsen van Buckyballs met je klauw, ben je klaar om deel te nemen aan de Grab and Go Challenge! Het doel van deze uitdaging is om zo snel mogelijk drie Buckyballs van de ene kant van het veld naar de andere kant te verplaatsen. Bekijk de onderstaande animatie om te zien hoe de Clawbot kan bewegen om de uitdaging te voltooien.
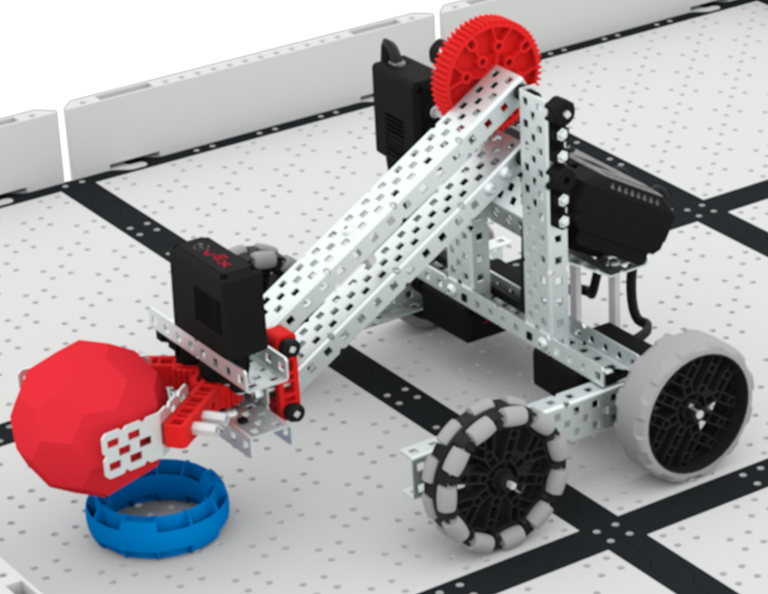
In deze animatie begint de Clawbot tegen de onderste muur in het midden van het veld. Langs de muur links van de robot zijn drie Buckyballs geplaatst, één op elke veldtegel. De robot rijdt vooruit en draait naar links om de eerste Buckyball te pakken. Vervolgens rijdt hij achteruit en draait zich om om de Buckyball in het gebied tegen de rechterzijmuur te plaatsen. Dit proces wordt herhaald om de andere twee Buckyballs van de linkerkant naar de rechterkant van het veld te verplaatsen.
Volg de stappen in dit document om de Grab and Go Challenge te voltooien.
Zodra je de Grab and Go Challenge hebt voltooid, meld je je bij je leraar. Zorg ervoor dat u de resultaten van de uitdaging in uw technisch notitieboekje hebt vastgelegd.
Afsluitende reflectie
Nu je het ontwerp van je klauw hebt uitgewerkt en de Grab and Go Challenge hebt gespeeld, is het tijd om terug te blikken op wat je in deze les hebt geleerd en gedaan. Begin een nieuwe pagina in je technische notitieboekje om met je reflectie te beginnen.
Geef uzelf een beoordeling van, een beginner,,, een leerling,ofeen expert,voor elk van de volgende concepten in uw technische notitieboekje. Geef een korte uitleg waarom u uzelf die beoordeling voor elk concept hebt gegeven:
- Ontwerpen, bouwen en itereren van uw klauwontwerp
- Buckyballs verplaatsen met de klauw
- Scouting om weloverwogen beslissingen te nemen over uw klauwontwerp en spelstrategie
Gebruik deze tabel om te bepalen in welke categorie u valt.
| Deskundige | Ik heb het gevoel dat ik het concept volledig begrijp en dit aan iemand anders kan uitleggen. |
| Leerling | Ik denk dat ik het concept goed genoeg begrijp om aan de uitdaging deel te nemen. |
| Beginner | Ik had het gevoel dat ik het concept niet begreep en niet wist hoe ik de uitdaging moest voltooien. |
Wat is het volgende?
In deze les heb je geleerd hoe een klauw werkt en heb je een klauw voor je robot ontworpen en hierop voortgebouwd. Je oefende met het oppakken en verplaatsen van Buckyballs met je klauw en deed mee aan de Grab and Go Challenge. In de volgende les leert u het volgende:
- Leer hoe een robotarm werkt
- Onderzoek verschillende soorten robotarmontwerpen
- Oefen met robotarmen om Buckyballs op te tillen en neer te laten
- Doe mee aan de Stacked Up Challenge
Selecteer < Terug naar les om terug te gaan naar het lesoverzicht.
Selecteer Volgende Les > om door te gaan naar Les 3 en te onderzoeken hoe robotarmen werken.