
แข่งขัน
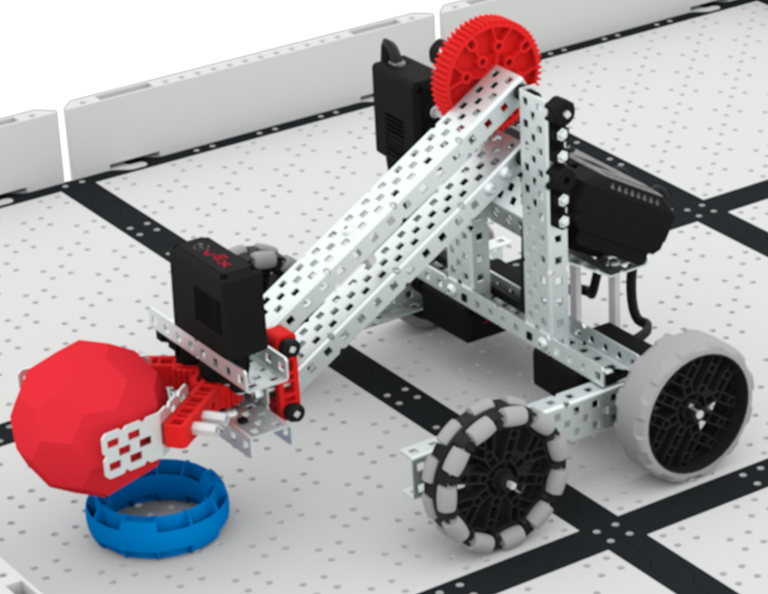
ตอนนี้คุณได้ทำซ้ำในการออกแบบกรงเล็บของคุณและฝึกฝนการหยิบและเคลื่อนย้ายบัคกี้บอลด้วยกรงเล็บของคุณแล้วคุณพร้อมที่จะแข่งขันใน Grab and Go Challenge แล้ว! เป้าหมายของความท้าทายนี้คือการย้ายบัคกี้บอลสามลูกจากด้านหนึ่งของสนามไปยังอีกด้านหนึ่งในเวลาที่เร็วที่สุด ดูภาพเคลื่อนไหวด้านล่างเพื่อดูวิธีหนึ่งที่ Clawbot สามารถเคลื่อนที่เพื่อทำการท้าทายให้สำเร็จ
ทำตามขั้นตอนในเอกสารนี้เพื่อทำ Grab and Go Challenge ให้เสร็จสมบูรณ์
เมื่อคุณเสร็จสิ้นการท้าทาย Grab and Go แล้วให้เช็คอินกับครูของคุณ ตรวจสอบให้แน่ใจว่าคุณได้บันทึกผลของความท้าทายไว้ในสมุดบันทึกวิศวกรรมของคุณ
สรุปการไตร่ตรอง
ตอนนี้คุณได้ทบทวนการออกแบบกรงเล็บของคุณ และเล่นเกม Grab and Go Challenge แล้วถึงเวลาทบทวนสิ่งที่คุณได้เรียนรู้และทำในบทเรียนนี้แล้ว เริ่มหน้าใหม่ในสมุดบันทึกวิศวกรรมของคุณเพื่อเริ่มต้นการไตร่ตรอง ของคุณ
ให้คะแนนตัวเองว่าเป็น มือใหม่ ฝึกหัดหรือ ผู้เชี่ยวชาญ ในแต่ละแนวคิดต่อไปนี้ในสมุดบันทึกวิศวกรรมของคุณ ให้คำอธิบายสั้นๆเกี่ยวกับเหตุผลที่คุณให้ คะแนนตัวเองสำหรับแต่ละแนวคิด:
- การออกแบบการสร้างและการทำซ้ำบนการออกแบบกรงเล็บของคุณ
- ใช้กรงเล็บเพื่อขยับบัคกี้บอล
- ตรวจสอบเพื่อตัดสินใจอย่างชาญฉลาดเกี่ยวกับการออกแบบกรงเล็บและกลยุทธ์เกมของคุณ
ใช้ตารางนี้เพื่อช่วยคุณกำหนดว่าคุณอยู่ในหมวดหมู่ใด
| ผู้เชี่ยวชาญ | ฉันรู้สึกว่าฉันเข้าใจแนวคิดนี้อย่างถ่องแท้และสามารถสอนเรื่องนี้ให้กับคนอื่นได้ |
| เด็กฝึกงาน | ฉันรู้สึกว่าฉันเข้าใจแนวคิดมากพอที่จะแข่งขันในความท้าทาย |
| มือใหม่ | ฉันรู้สึกว่าฉันไม่เข้าใจแนวคิดและไม่รู้ว่าจะทำสิ่งที่ท้าทายให้สำเร็จได้อย่างไร |
ขั้นตอนต่อไปคืออะไร?
ในบทเรียนนี้คุณได้เรียนรู้ว่ากรงเล็บทำงานอย่างไรและออกแบบและทำซ้ำบนกรงเล็บสำหรับหุ่นยนต์ของคุณ คุณ ฝึกการหยิบและเคลื่อนย้ายบัคกี้บอลด้วยกรงเล็บของคุณและเข้าร่วมการแข่งขัน Grab and Go Challenge ในบทเรียนถัดไปคุณจะ:
- เรียนรู้วิธีการทำงานของแขนหุ่นยนต์
- ตรวจสอบการออกแบบแขนหุ่นยนต์ประเภทต่างๆ
- ฝึกใช้แขนหุ่นยนต์ยกและลดบัคกี้บอล
- แข่งขันในการ ท้าทายแบบเรียงซ้อน
เลือก < กลับไปที่บทเรียน เพื่อกลับไปที่ภาพรวมของบทเรียน
เลือกบทเรียน ถัดไป > เพื่อดำเนินการต่อไปยังบทเรียนที่ 3 และตรวจสอบวิธีการทำงานของแขนหุ่นยนต์