
সিএস লেভেল ১ - ভেক্সকোড ভিআর পাইথন
9 ইউনিট
VEXcode VR Python-এ টেক্সট-ভিত্তিক কোডিং দিয়ে আপনার কম্পিউটার বিজ্ঞানের যাত্রা চালিয়ে যান! বিভিন্ন কোডিং চ্যালেঞ্জ সমাধানের জন্য একটি ভিআর রোবট ব্যবহার করে, শিক্ষার্থীরা পাইথনের প্রকল্প প্রবাহ, লুপ, শর্ত এবং অ্যালগরিদম সম্পর্কে শিখবে।
আপনি VEXcode VR এর সাথে শেখানোর সাথে সাথে আপনাকে সমর্থন করার জন্য চলমান পেশাদার বিকাশ অ্যাক্সেস করুন। ভিডিও, পাঠ, সম্প্রদায়ের কথোপকথন এবং আরও অনেক কিছুর মাধ্যমে সময়োপযোগী এবং লক্ষ্যযুক্ত পিডি!

ইউনিট 1
ভূমিকা এবং মৌলিক বিষয়গুলি
এই ইউনিটটি আপনাকে VEXcode VR এর মূল্য এবং এটি ব্যবহার করা কতটা সহজ তা দেখায়। এই ইউনিটটি কোর্সের কাঠামোর রূপরেখাও তুলে ধরে, আপনাকে কী প্রত্যাশিত তার একটি পূর্বরূপ দেয় এবং সফল হওয়ার জন্য সরঞ্জামগুলি সরবরাহ করে।

ইউনিট 2
আপনার রোবটটি সরানো হচ্ছে
এই ইউনিটে, তুমি ক্যাসেল ক্র্যাশার চ্যালেঞ্জ সমাধান করবে। তুমি শিখবে কিভাবে পাইথন ব্যবহার করে ভিআর রোবটকে ক্যাসল ক্র্যাশার খেলার মাঠে ঘোরাফেরা করার জন্য ড্রাইভট্রেন কমান্ড ব্যবহার করতে হয়। খেলার মাঠের সমস্ত দুর্গ ভেঙে ফেলার জন্য আপনি কীভাবে কমান্ডগুলি সঠিকভাবে ক্রম করতে হয় তাও শিখবেন।
ইউনিট 3
পুনরাবৃত্তিমূলক আচরণ
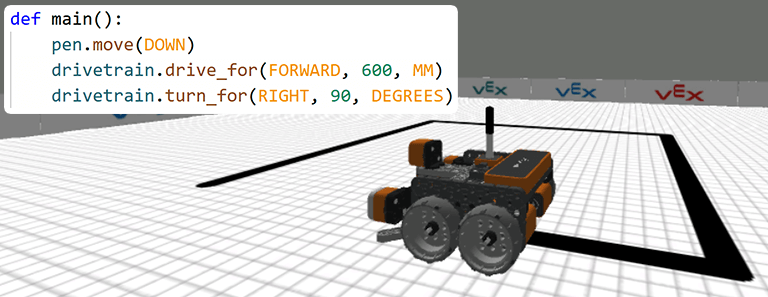
এই ইউনিটে, তুমি "একটি ঘর আঁকুন" চ্যালেঞ্জটি সমাধান করবে। আপনি শিখবেন কিভাবে VR রোবটে পেন টুল ব্যবহার করে আর্ট ক্যানভাস খেলার মাঠে বিভিন্ন আকার আঁকতে হয়। আপনি পাইথনে for loops ব্যবহার করে একাধিক আচরণ পুনরাবৃত্তি করতে শিখবেন, যেমন একটি বর্গক্ষেত্রের পাশ আঁকা।
ইউনিট 4
একটি গোলকধাঁধা নেভিগেট করা
এই ইউনিটটি আপনাকে দেখাবে কিভাবে সেন্সর ইনপুট ব্যবহার করে VR রোবটকে তার আশেপাশের পরিবেশ নির্বিশেষে নেভিগেট করতে হয়, শুধুমাত্র ড্রাইভট্রেন কমান্ডের মাধ্যমে "হার্ড-কোডিং" মুভমেন্টের পরিবর্তে। এটি একটি কার্যকর অ্যালগরিদম তৈরি করতে সক্ষম হওয়ার একটি গুরুত্বপূর্ণ প্রথম পদক্ষেপ। তুমি পাইথন ব্যবহার করে ওয়াল মেজ চ্যালেঞ্জে কাজ করবে, শুরু থেকে শেষ পর্যন্ত ওয়াল মেজ খেলার মাঠে ভিআর রোবট নেভিগেট করবে। তুমি শিখবে কিভাবে বাম্পার সেন্সর এবং while লুপ ব্যবহার করে ওয়াল মেজ চ্যালেঞ্জ সমাধান করতে হয়।
ইউনিট 5
দূর থেকে দেয়াল সনাক্তকরণ
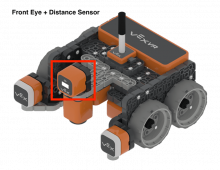
এই ইউনিটে, আপনি ওয়াল মেজ চ্যালেঞ্জের মাধ্যমে শুরু থেকে শেষ পর্যন্ত ভিআর রোবট নেভিগেট করবেন, দেয়ালে ধাক্কা না খেয়েই! ওয়াল মেজ চ্যালেঞ্জ সমাধানের জন্য আপনি ভিআর রোবটে দূরত্ব সেন্সর ব্যবহার করতে শিখবেন, যেখানে while loops এবং তুলনামূলক অপারেটর ব্যবহার করা হবে।
ইউনিট 6
আপনার অবস্থান জানা
এই ইউনিটে, আপনি ড্রাইভ টু থ্রি নাম্বার চ্যালেঞ্জটি সম্পন্ন করবেন এবং লোকেশন সেন্সর ব্যবহার করে নম্বর গ্রিড ম্যাপ খেলার মাঠের তিনটি ভিন্ন নম্বরযুক্ত স্থানে ভিআর রোবটটি নেভিগেট করবেন! ড্রাইভ টু থ্রি নাম্বার চ্যালেঞ্জ সমাধানের জন্য আপনাকে ড্রাইভট্রেন, সেন্সিং এবং কন্ট্রোল বিভাগ থেকে সঠিক ক্রমানুসারে কমান্ড প্রয়োগ করতে হবে।
ইউনিট 7
রঙের সাথে সিদ্ধান্ত
এই ইউনিটে, আপনাকে শর্তাধীন বিবৃতির গুরুত্বের সাথে পরিচয় করিয়ে দেওয়া হবে। আপনি অনুসন্ধান করবেন কেন শর্তসাপেক্ষ বিবৃতি, যেমন if বিবৃতি, অসীম লুপের সাথে ব্যবহার করা প্রয়োজন, যেমন infinite while loops, যাতে VR রোবটটি উদ্দেশ্য অনুসারে কাজ করতে পারে। তুমি শিখবে কিভাবে ডিস্ক মেজ চ্যালেঞ্জ সমাধানের জন্য আই সেন্সর এবং কন্ডিশনাল স্টেটমেন্ট ব্যবহার করতে হয়। ডিস্ক মেজ চ্যালেঞ্জে, ভিআর রোবটটি আই সেন্সর ব্যবহার করে রঙ সনাক্ত করতে শুরু থেকে শেষ পর্যন্ত ডিস্ক মেজ খেলার মাঠে নেভিগেট করবে।
ইউনিট 8
লুপ সহ ডিস্ক সরানো
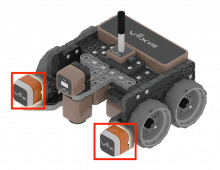
এই ইউনিটে, আপনি সেন্সর ফিডব্যাক এবং নেস্টিং লুপের গুরুত্ব শিখবেন। ডিস্ক মুভার চ্যালেঞ্জ সমাধানের জন্য আপনি VR রোবটে ইলেক্ট্রোম্যাগনেট ব্যবহার করে ডিস্ক তোলা এবং নামানোর পদ্ধতি শিখবেন। আপনি পূর্ববর্তী ইউনিটগুলিতে শেখা দক্ষতা প্রয়োগ করে একটি VEXcode VR প্রকল্প তৈরি করবেন যা VR রোবট সেন্সর এবং লুপ ব্যবহার করে ডিস্ক মুভার চ্যালেঞ্জ সমাধান করবে।
ইউনিট 9
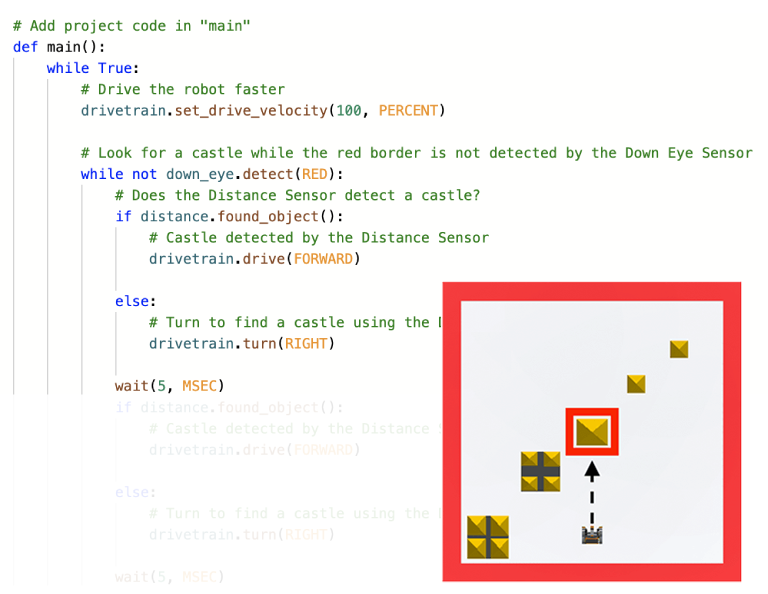
অ্যালগরিদম তৈরি করা
এই ইউনিটটি আপনাকে অ্যালগরিদমের সাথে পরিচয় করিয়ে দেবে। ইউনিট ২-এ, আপনি ক্যাসেল ক্র্যাশার চ্যালেঞ্জটি এমন একটি খেলার মাঠে সমাধান করেছিলেন যেখানে লেআউট পরিবর্তন হয়নি। এই ইউনিটে, আপনাকে একই চ্যালেঞ্জ সমাধান করতে হবে, কিন্তু এমন একটি খেলার মাঠে যেখানে প্রতিটি রিসেট করার সাথে সাথে লেআউট পরিবর্তন হয়। এটি এমন একটি অ্যালগরিদমের প্রয়োজনীয়তার পরিচয় দেয় যা সাধারণ কমান্ডের ক্রম পরিবর্তে সেন্সর প্রতিক্রিয়া ব্যবহার করে।